

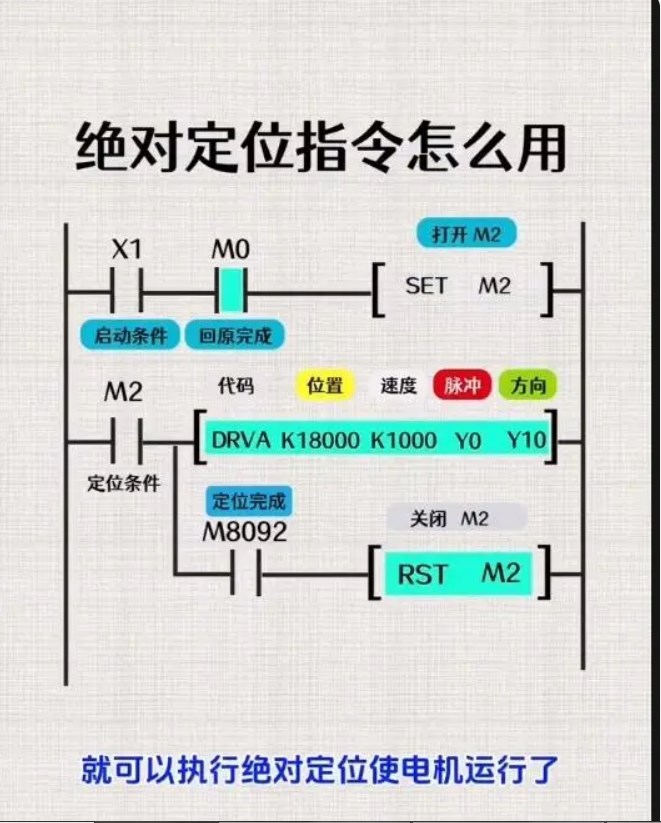
定位指令中的绝对定位是什么?绝对定位指令怎么用?
描述
在自动化设备和机器人技术中,定位指令是一种非常重要的控制手段。它可以帮助设备或机器人精确地移动到预定的位置,从而实现各种复杂的操作。在定位指令中,绝对定位是一种常用的定位方式,它是指根据预先设定的目标位置,直接计算出设备或机器人需要移动的距离和方向,从而实现精确定位。本文将详细介绍绝对定位的概念、原理以及使用方法。
一、绝对定位的概念
绝对定位是一种基于目标位置的直接定位方法,它不需要依赖设备或机器人当前的位置信息,而是直接根据预先设定的目标位置来计算需要移动的距离和方向。绝对定位的优点是定位精度高,不受环境因素的影响,适用于各种复杂环境下的定位任务。但是,绝对定位的缺点是需要预先知道目标位置,对于未知环境的适应性较差。
二、绝对定位的原理
绝对定位的原理是根据设备或机器人的运动学模型,通过计算目标位置与当前位置之间的距离和方向,来控制设备或机器人的运动。运动学模型通常包括设备的关节角度、长度等参数,以及设备的运动学方程。通过求解运动学方程,可以得到设备或机器人在各个关节上的转动角度,从而实现精确定位。
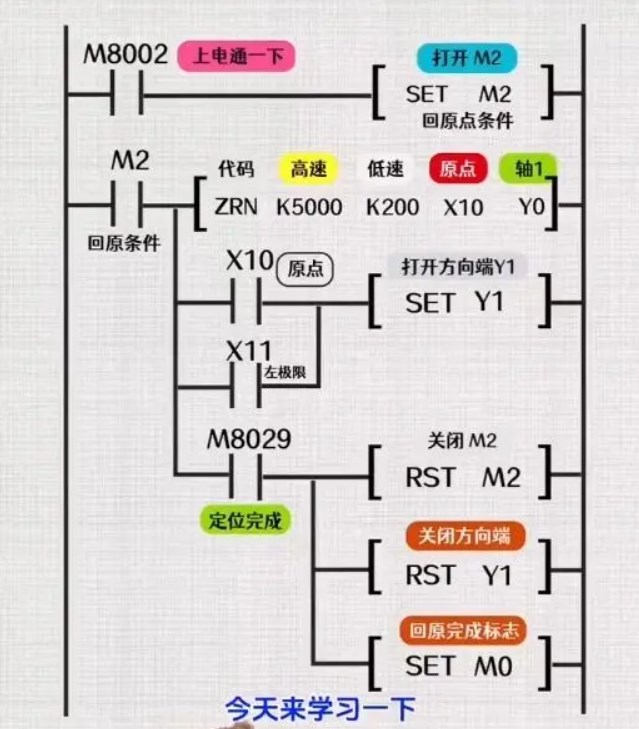
在实际应用中,绝对定位通常采用以下步骤:
1.确定目标位置:根据实际需求,预先设定设备或机器人需要到达的目标位置。目标位置可以是二维坐标系中的点,也可以是三维空间中的点。
2.获取当前位置:通过传感器或其他手段,实时获取设备或机器人当前的位置信息。当前位置信息可以是二维坐标系中的点,也可以是三维空间中的点。
3.计算距离和方向:根据目标位置和当前位置,计算设备或机器人需要移动的距离和方向。距离可以通过勾股定理或其他数学方法计算得到,方向可以通过向量运算得到。
4.控制设备或机器人运动:根据计算出的距离和方向,控制设备或机器人的运动。运动控制可以通过电机驱动、液压驱动等方式实现。
5.检测并调整:在设备或机器人运动过程中,实时检测其位置信息,并与目标位置进行比较。如果发现偏差,可以根据实际情况调整运动策略,以实现更精确的定位。
三、绝对定位的使用方法
在实际使用绝对定位时,需要注意以下几点:
1.选择合适的运动学模型:根据设备或机器人的结构特点和运动特性,选择合适的运动学模型。不同的运动学模型可能会影响到定位精度和稳定性。
2.准确获取当前位置信息:当前位置信息的获取对绝对定位的精度至关重要。因此,需要选择合适的传感器或其他手段,确保能够准确、实时地获取当前位置信息。
3.考虑环境因素:在实际应用中,可能会受到环境因素的影响,如温度、湿度、磁场等。这些因素可能会导致传感器的测量误差,从而影响到定位精度。因此,在使用绝对定位时,需要考虑这些环境因素,并进行相应的补偿处理。
-
伺服电机绝对定位和相对定位问题2024-03-18 6862
-
请教伺服电机绝对定位和相对定位问题2024-02-05 2857
-
RA Flash地址绝对定位2023-10-26 1759
-
西门子S7-1200 PLC定位控制教程2023-06-25 13467
-
计算绝对值指令(ABS)类型2023-06-17 5222
-
相对定位和绝对定位的区别YS YYDS 2023-05-27
-
什么是绝对定位#硬声创作季电子学习 2022-11-15
-
#伺服电机 #PLC 相对定位指令和绝对定位指令的区别.学习电子知识 2022-10-24
-
怎样去解决KEIL arm C51中变量和函数的绝对地址定位问题呢2022-05-20 9918
-
日本富士伺服电机的绝对定位和相对定位2020-06-12 3364
-
PLC控制步进电机实例,实现机构原点回归、相对定位和绝对定位2017-11-13 33784
-
定位程序参数设定指令2017-09-29 636
-
板子的安装定位孔指令讨论2011-08-19 5788
-
51单片机C语言编程中的绝对定位问题2010-07-16 456
全部0条评论

快来发表一下你的评论吧 !
