

基于ADXL345加速度传感器的倾角测量系统设计
描述
摘 要:
针对临床穿刺手术操作中穿刺针杆插入角度容易出现偏差的困境,基于ADXL345加速度传感器开发了一套倾角测量系统。首先给出了ADXL345加速度传感器的倾角测量物理原理;其次给出了该套倾角测量系统的硬件设计,包括ESP32主机、ADXL345加速度传感器和OLED显示模块,并给出了系统软件设计的程序流程图。研制结果表明,该倾角测量系统能够较好地实时监测穿刺针杆插入角度,方便医生手术操作,必将有效提高穿刺手术成功率。
0引言
穿刺器广泛用于妇科、普外科、胸科和泌尿科等医疗手术操作中,用于建立器械入口、病变抽取和病变治疗等。临床操作中,穿刺器的刺入角度非常关键,尽管有影像引导,但穿刺针的入针方位角度通常由操作医生凭借经验把握,对操作医生医疗临床操作水平要求较高。实际临床中,当微创手术连续进行时,操作医生产生疲劳,容易导致入针角度出现偏差,不能准确到达病变位置,造成手术失败,增加患者穿刺次数和并发症发生率[1]。
针对这一问题,以CT影像引导临床操作为应用对象,如图1所示,设计一套能够实现实时测量,准确显示入针方位角度的系统,辅助操作医生顺利、准确地将穿刺器送达病变位置,减轻操作医生体力消耗,提高手术成功率,具有重要的医疗应用前景。
1ADXL345加速度传感器
ADXL345加速度传感器是美国ADI公司生产的一款体积较小的超低功耗数字化加速度传感器[2-3],它由三轴加速度传感器、敏感电子元件、模数转换、数字滤波、电源管理和逻辑控制、串行端口组成,由固定于机械惯性系统上的敏感电子元件测量加速度变化,经数字化处理后输出。ADXL345传感器芯片采用双地址自选址型,INT1和INT2悬空为默认地址,INT1和INT2置高电平为备用地址,其数据通过IIC总线传回MCU部分进行处理并计算得出角度。
2倾角测量原理
穿刺针杆倾斜角由ADXL345加速度传感器敏感重力加速度获得。为了测量微创手术穿刺针杆的角度,将针杆假想为形状规则的质量块,当测量处于平衡状态时,倾角由唯一激励源——重力加速度获得。考虑敏感轴上的分量,与重力加速度的大小和方向建立关系,可以实现倾斜角度的测量[4-5]。
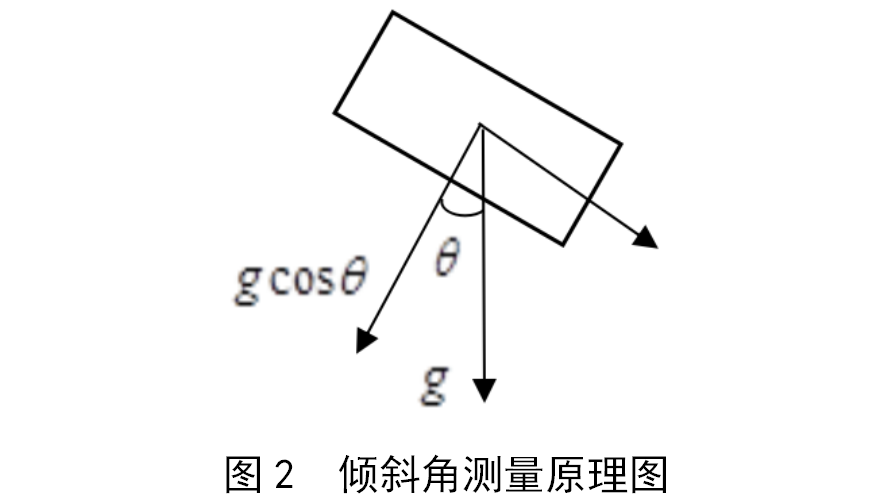
2.1 单轴加速度
设加速度传感器测量结果为F(θ),θ为倾斜角度,g为重力加速度,如图2所示。则有:

2.2 两轴加速度
对于两轴加速度传感器,令两个传感方向x→,y→皆垂直于重力加速度方向,当两轴倾斜角θx,θy变化时,加速度传感器测量结果为:
运用两轴加速度传感器无法解决倾斜角测量中全方位和全摆幅共同实现的矛盾,所以,为测量一个全方位、全摆幅的倾斜角,就必须使用三轴加速度。
2.3 三轴加速度
根据牛顿第二定律,在宏观低速情况下,在外力作用下,产生一定大小的加速度,即:
假定质量块没有受到其他外力的作用,仅受重力作用,其在空间三个坐标上产生由重力分力引起的加速度分量ax→,ay→,az→,如图3所示。
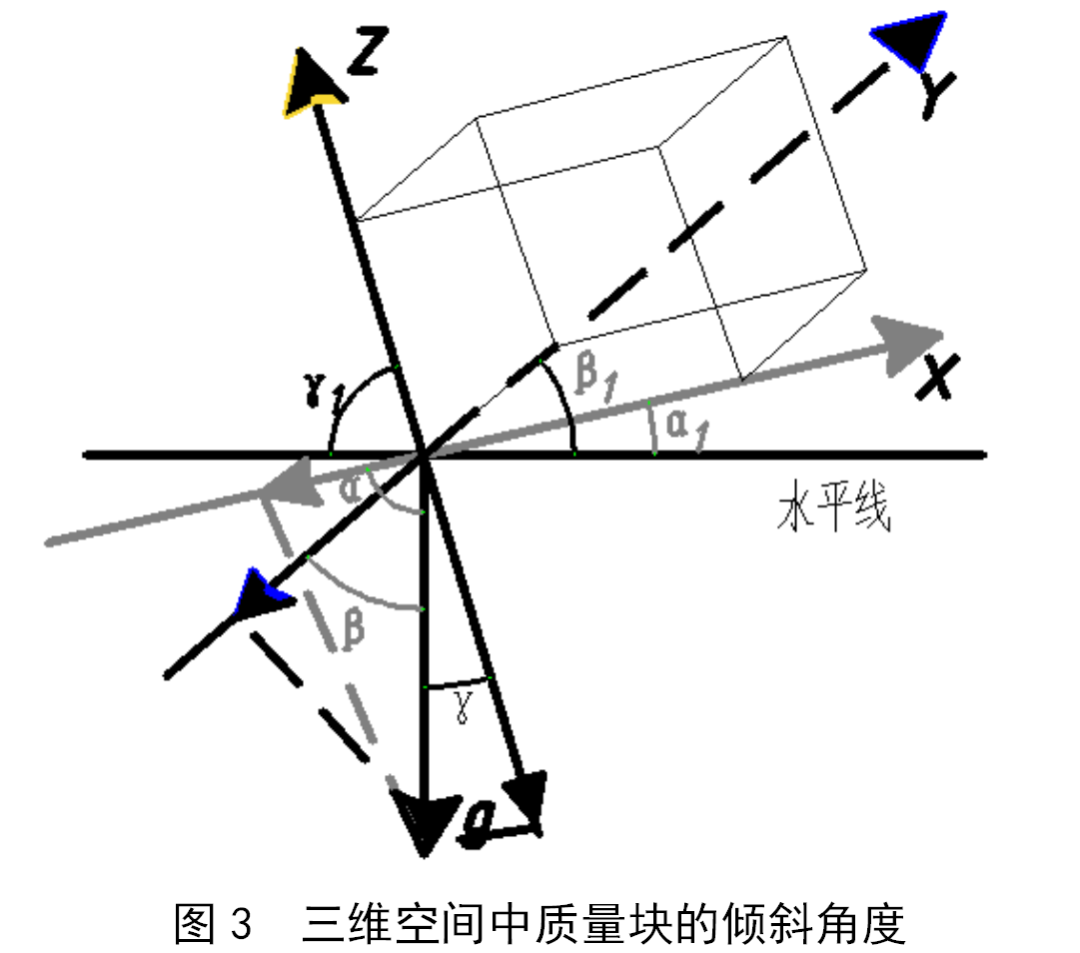
根据夹角几何关系,有:

重力加速度g在各轴上的分量为:

联立式(5)和(6),有:

则质量块的空间方位角度可由以下公式计算得出:
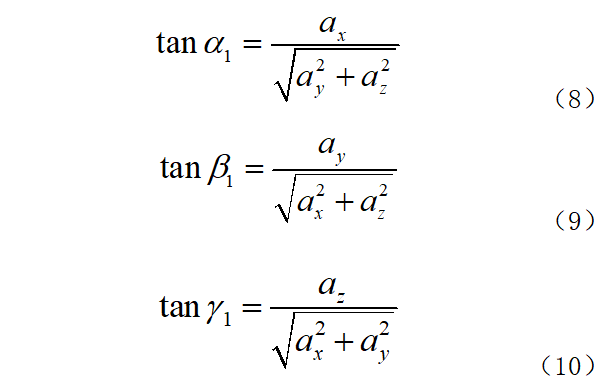
式中:α1,β1,γ1为质量块姿态改变后质量块的方位角。
实际应用中,ADXL345加速度传感器基于惯性原理,首先获得质量块(穿刺针杆)的加速度数值信息,然后根据式(8)至式(10)计算得到质量块(穿刺针杆)的方位角度信息。
3系统设计
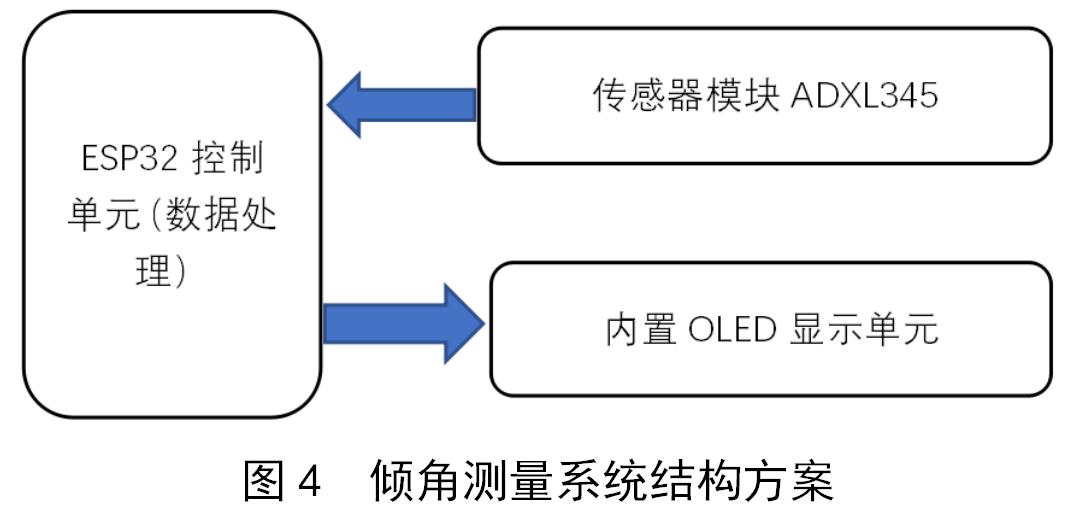
该系统主要包括仪器主机ESP32控制单元、传感器模块ADXL345和内置OLED显示单元,系统框图如图4所示。
3.1 硬件设计
该倾角测量系统主机端基于ESP32单片机[6],如图5所示,它是一款集成Wi-Fi功能的微控制器,拥有强大的性能,可以用来开发复杂的应用,内置32位双核处理器,最高频率为240 MHz。ESP32具有性能强大、响应速度快、功耗低等优势,除此之外,自带Wi-Fi和蓝牙功能,配置充电管理、OLED显示,采用4层PCB、元件堆叠等方案使体积最小化,尽可能减轻对操作者精确操作的影响。

传感器选择ADXL345加速度传感器,实物如图6所示,可检测静态的重力加速度,也可测量运动或冲击导致的动态加速度。需要注意的是,ADXL345加速度传感器不能直接测量物体的三维角度值,它是先测量物体的重力加速度,再解析重力加速度在X、Y、Z三轴间的分量,最后利用解算公式求出物体在三维方向的角度值。
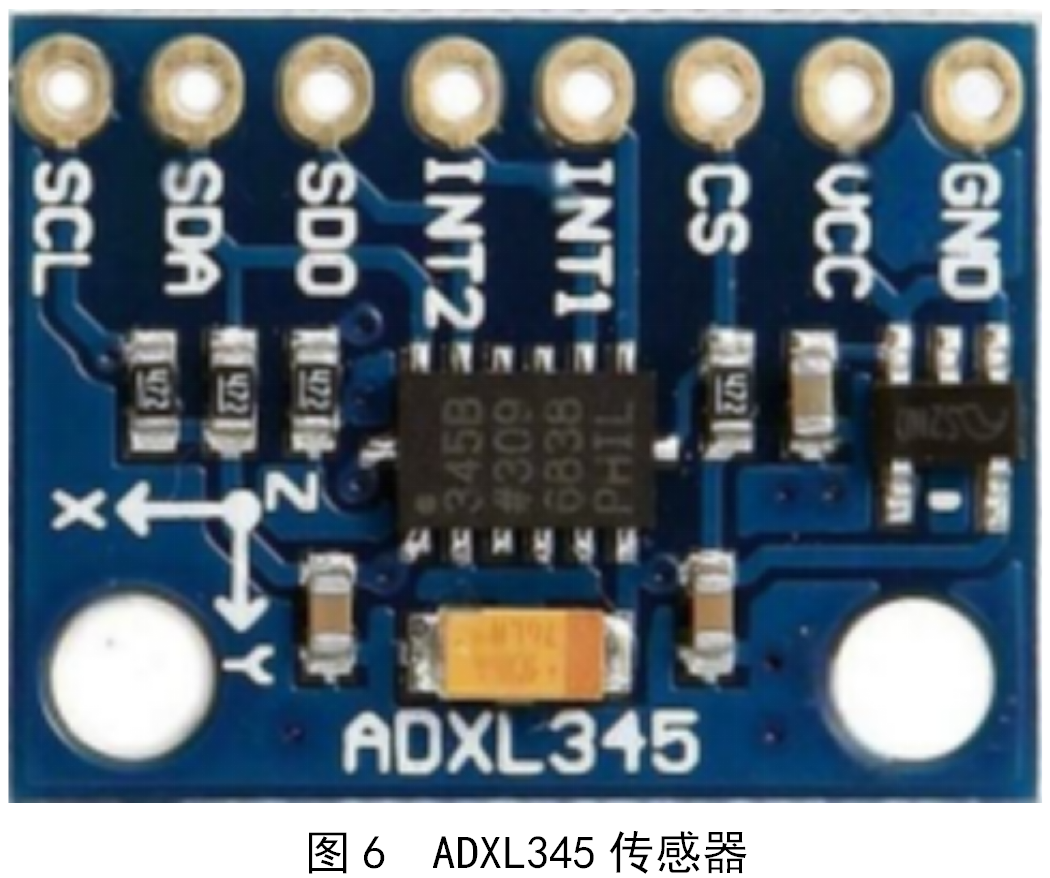
经滤波算法处理后,传感器模块角度测量精度可达±0.1°;同时采用通用夹具方案,可通过更换夹具适配多种医疗设备或用于其他用途。
由加速度传感器可换算得出三轴角度。由于使用重力场作为基准,当Z轴平行于重力方向时,回转角度(XY轴组成的平面上的回转角度)无法获得有效参考,不能得到有效的回转角度读数,因此,在平行于铅垂面的平面上,在传感器模块加入十字激光参考。十字激光两轴分别与X、Y轴平行,十字激光两轴相对于参考坐标系X、Y轴的偏转均为回转角。
3.2 软件设计
系统程序设计是测量系统设计的重点。由于ESP32采用了FreeRTOS系统框架,系统的控制流程大为简化,同时有利于后期的维护。
软件部分主要由主程序和终端服务程序两部分组成,终端程序负责接收ADXL345加速度传感器发来的倾角数据,主程序负责倾角数据的二次处理、用户数据命令的收发、存储管理、界面显示等一系列工作。
主程序设计分为五个实时运行任务,分别为数据处理任务、蓝牙任务、Wi-Fi任务、显示任务和看门狗复位任务。
系统程序流程如图7所示。
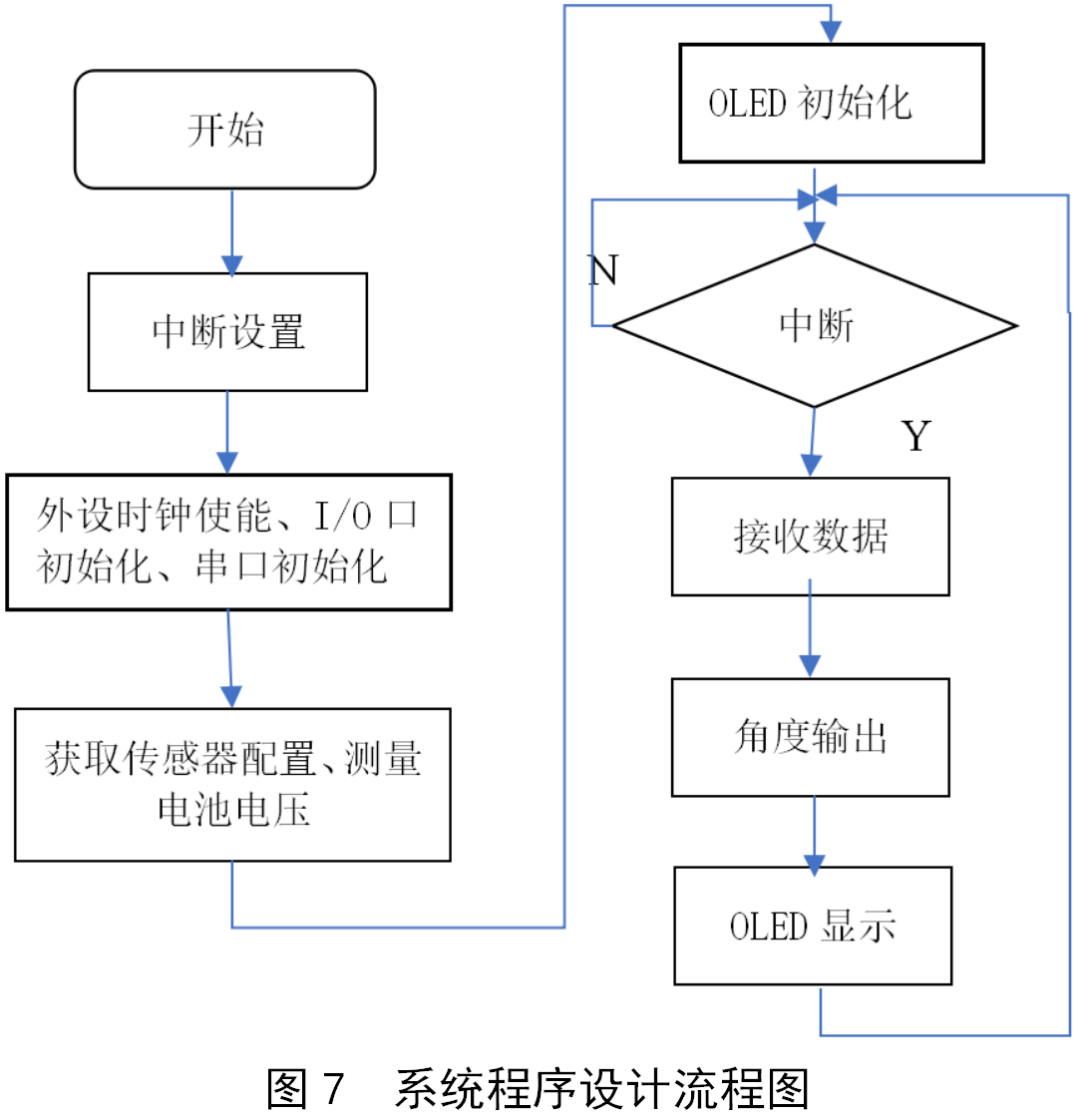
程序设计中,先初始化串口、I/O口和显示模块,同时获取传感器模块的配置和仪器主机电池电压,然后在终端程序内读取传感器模块ADXL345发来的数据信息,随后对数据信息进行角度换算处理,再发送到OLED模块显示。
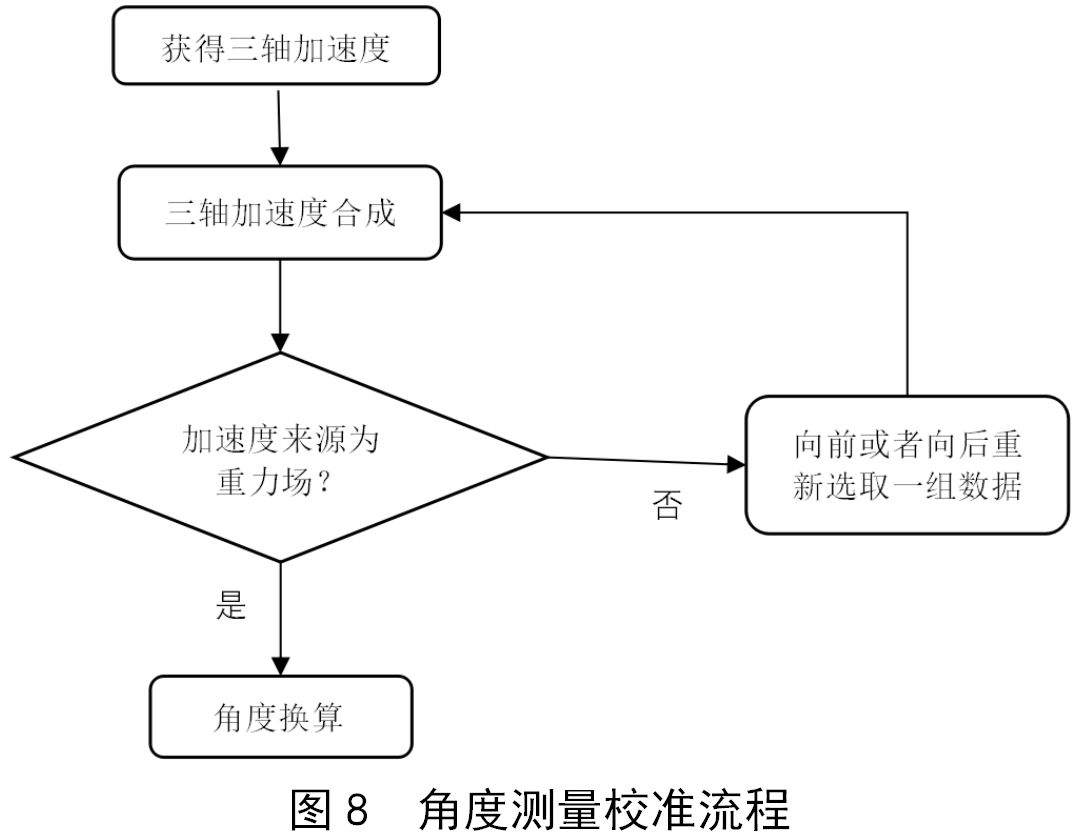
测量系统使用过程中,操作者手部的轻微抖动会影响传感器基于重力场对方位角的计算,因此引入时差校准来消除影响,即提前或者延后若干毫秒再采集数据。
计算校准流程如图8所示。
具体校准程序设计设置如下:
dy = atan(Y_out / sqrt(pow(X_out, 2) + pow(Z_out, 2))) * 180 / PI;
dx = atan(-1 * X_out / sqrt(pow(Y_out, 2) + pow(Z_out, 2))) * 180 / PI;
// Low-pass filter
dyf = 0.94 * dyf + 0.06 * dy;
dxf = 0.94 * dxf + 0.06 * dx; //加权平均校准,实时数据权重0.94,时差数据权重0.06
if(digitalRead(0)==HIGH) //实时测量选择高电平
……
目前,基于ADXL345加速度传感器的倾角测量系统已制作完成,系统采用模块化设计,包括ESP32主机模块、传感器模块和OLED显示单元,如图9所示。
4结语
基于ADXL345传感器的倾角测量系统采用模块化设计,结构简单,成本低,具有较好的医疗应用前景。通过硬件选取和软件程序设计,目前该倾角系统已基本制作完成,但穿刺针杆的夹持结构设计还不够简便,硬件系统无菌化处理问题还没有解决,与实际医疗应用需求尚有差距,需要进一步改进完善。
审核编辑:汤梓红
-
adxl345的工作原理,输出的电压与加速度有什么关系?2023-12-29 0
-
ADXL345的x轴测出的加速度是离心加速度吗?2024-01-01 0
-
想知道除了ADXL345这种加速度传感器之外,有没有比它尺寸更小的加速度传感器号?!!!2015-07-16 0
-
基于ADI的ADXL345的加速度传感器典型应用2018-09-10 0
-
adxl345的使用问题2018-09-11 0
-
ADXL345的x轴测出的加速度是离心加速度吗2018-12-26 0
-
请问怎样控制ADXL345只测量动态加速度2019-01-07 0
-
零知开源分享-ADXL345三轴加速度传感器的使用2019-05-23 0
-
请问ADXL345加速度传感器实验怎么弄?2019-11-19 0
-
ADXL345三轴加速度传感器的初始化步骤2021-01-14 0
-
加速度传感器ADXL345电子资料2021-04-08 0
-
iMEMS加速度传感器ADXL3452010-09-14 4794
-
基于3轴加速度计ADXL345的跌倒检测应用2011-11-28 2429
-
加速度传感器ADXL345模块测试程序2016-02-25 1380
-
加速度模块资料ADXL3452017-10-18 778
全部0条评论

快来发表一下你的评论吧 !
