

线性马达电机性能指标的具体含义及测试方法
描述
LRA(Linear Resonance Actuator,线性谐振执行器)是目前广泛应用于智能手机的一种线性马达电机。线性马达其系统架构如下。
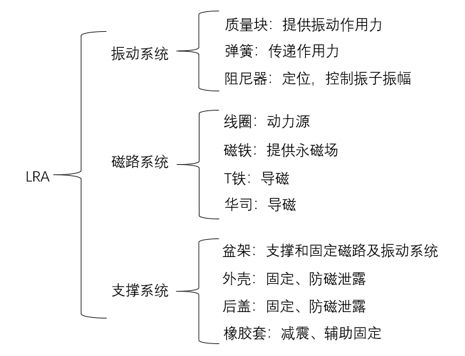
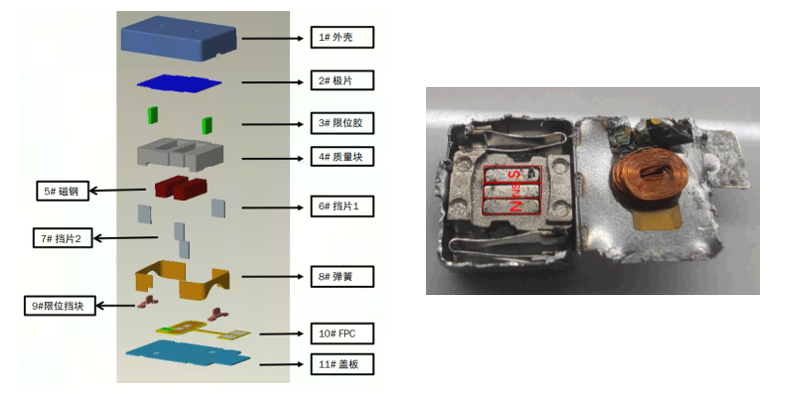
图1:X轴线性马达示意及实物图
一个标准的线性马达的架构主要包括振动系统,磁路系统以及支撑系统三大模块,每个模块又由若干组件构成。振动系统为马达振动力的产生传递提供硬件条件,磁路系统为系统提供磁场,支撑系统是马达的结构框架。
根据法拉第定律,当具有导通电流的导体垂直于磁场时,会受到力的作用。其方向符合左手定则,力与电流、磁场方向互相垂直,受力大小与电流、导线长度、磁通密度成正比。线性马达就是根据这个原理,把线圈(导体)置于一个磁场中并向其输入交变的电流,线圈产生交变磁场,进而产生交变力推动质量块(内含磁铁)进行往复运动。
线性马达性能是电学、力学、磁学等物理参数共同作用的结果,由振子、弹波、线圈、磁路等关键零部件的性能共同确定,其中一些参数相互制约相互影响,因而在线性马达的驱动设计时必须综合考虑,以求达到最佳的振动效果。本文主要介绍评判LRA性能的关键指标。
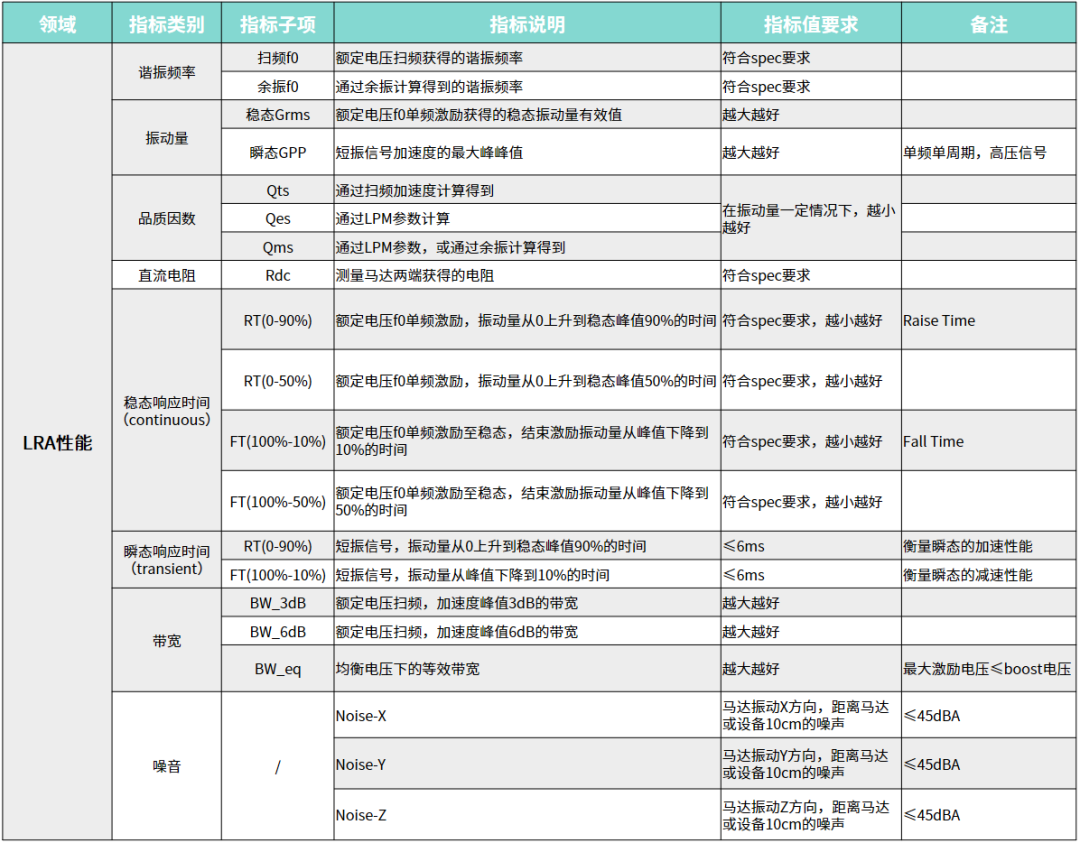
表1 LRA性能和振动触觉指标总览
下面将逐一解释每个性能指标的具体含义及测试方法。
01谐振频率
线性马达系统的谐振频率计算公式为f0= ,k为弹簧的劲度系数,md为振子质量。
,k为弹簧的劲度系数,md为振子质量。
下面是f0的两种测试方法:
谐振频率——扫频f0: LRA为交流电驱动,通电的线圈在磁场中受安培力,从而驱动马达振动。交流电的电压和频率是影响马达振动强度的两大因素,一般通过改变频率来改变马达振感进而匹配不同的手机使用场景。下图是一个典型的LRA频响曲线。即在额定电压下,给马达输入不同频率的电压激励信号,测量获得不同频率下的运动加速度(实验室更容易获取加速度值,因此将其作为马达运动情况的反映),对其数据进行处理得到频响曲线。计算最大振动量时对应的频率即为谐振频率f0,如下图示例,马达扫频f0=171.1Hz。
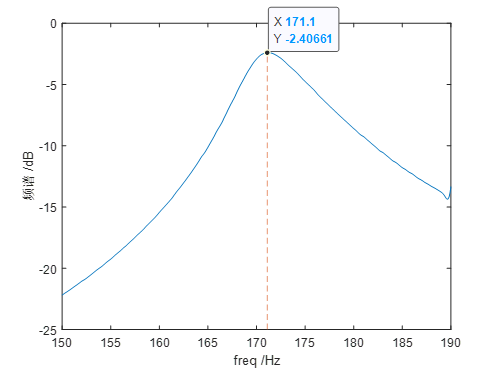
图2:幅频响应曲线
谐振频率——余振f0: 在额定电压下,给马达输入指定频率和时长的电压激励信号,测量激励结束后的加速度(电流、BEMF),从而得出余振f0。
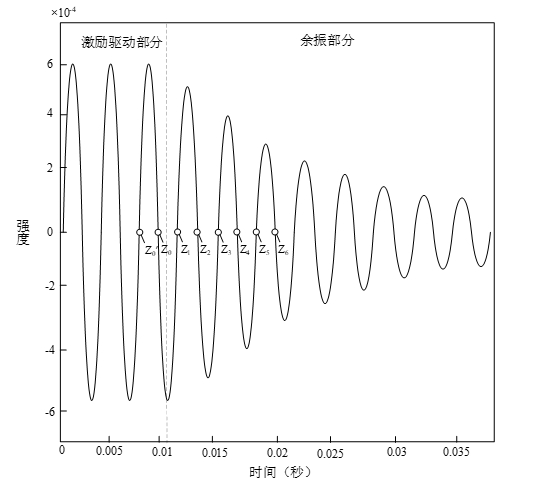
图3:f0测试示意图
02振动量
振动量——稳态Grms: 采用额定电压、f0单频信号激励马达,测量运动加速度,计算其稳态时的加速度有效值即为振动量Grms。
公式: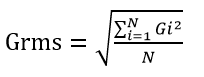
振动量——瞬态GPP: 采用最强短振信号激励马达,测量其加速度acc,计算其峰峰值即为瞬态GPP。
公式:GPP=max(acc)-min(acc) ,
如示例,GPP≈ 2g, Grms=0.71g 。
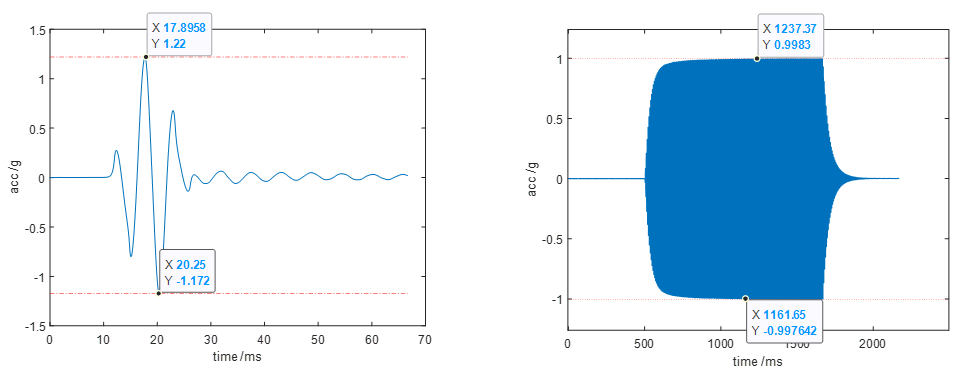
图4:稳态及瞬态振动示意图
03品质因数:Qts、Qes、Qms
品质因数表示振子阻尼性质,Qts值可以通过谐振频率相对于带宽大小来计算得到。
公式: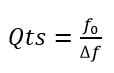
其中 ,
,
电气品质因数Qes表征电压放大器的有效阻尼。
机械品质因数Qms表征机械的有效阻尼。
04直流电阻
Rdc: 通过万用表测量马达两端电阻可得直流内阻值。
05稳态响应时间
稳态响应时间——RT: 使用f0频率、额定电压激励马达,RT指从激励开始到达指定振动量所需要的时间,例如RT(0-90%):振动量从0到峰值90%的时间, RT(0-50%):振动量从0到峰值50%的时间。
如示例, RT(0-90%) = 96ms, RT(0-50%) = 26ms.
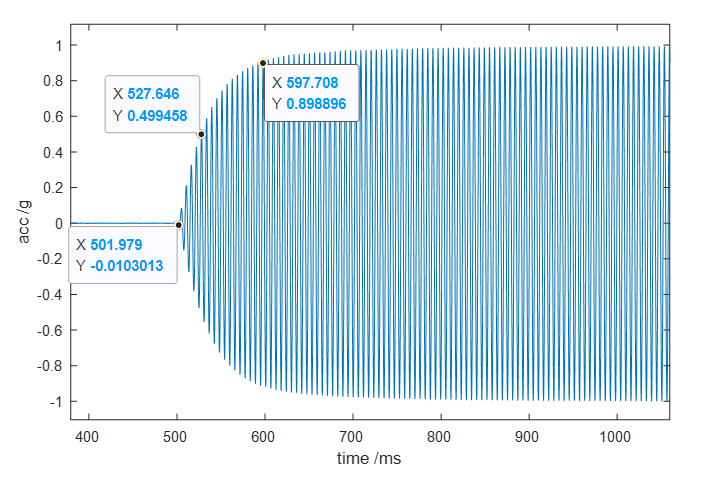
图5:稳态上升时间示例
稳态响应时间——FT: 使用f0频率、额定电压激励马达达到稳态后停止激励,FT是从激励结束后到达指定振动量所需要的时间,例如FT(100%-10%):振动量从峰值降到10%的时间,FT(100%-50%):振动量从峰值降到50%的时间。如示例, FT(100%-10%) = 99ms, FT(100%-50%) = 29ms。
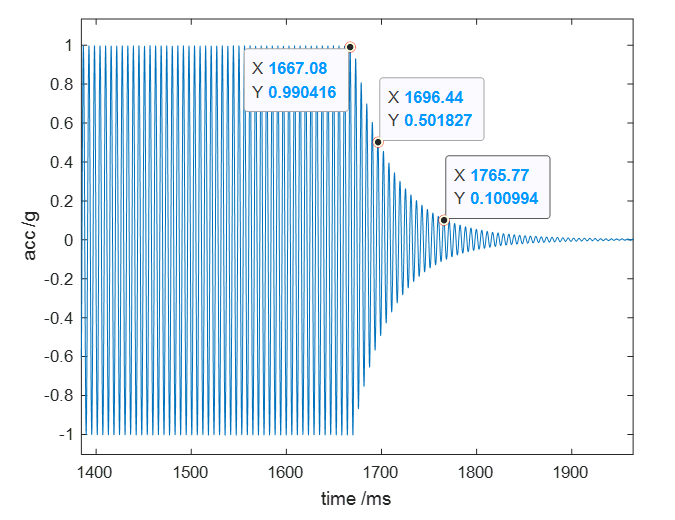
图6:稳态下降时间示例
06瞬态响应时间
瞬态响应时间——RT: 使用最强短振电压信号激励马达,测量加速度,RT是从激励开始到达指定振动量所需要的时间,例如RT(0-90%):振动量从0到峰值90%的时间。
瞬态响应时间——FT: 使用最强短振电压信号激励马达,测量加速度,FT是从峰值下降到指定振动量的时间,例如FT(100%-10%):振动量从峰值降到10%的时间。
如图示例:RT=5ms,FT=4.6ms。
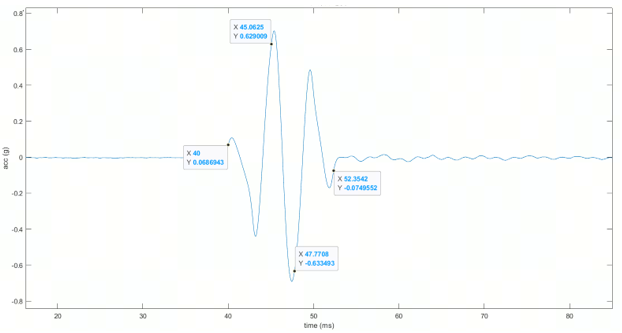
图7:瞬态响应上身下降时间示例
瞬态响应是评判触觉效果的核心指标。
07失真度
THD: 扬声器的失真,主要由振动系统的非线性和磁路系统的非线性产生。在大振幅情况下,由折环及弹波所组成的振动系统悬挂体,不再符合线性的虎克定律;磁间隙内磁感应密度沿轴向的不均匀性和导磁材料的非线性特性等都会产生非线性失真。其主要衡量指标是总谐波失真,主要分为互调失真、瞬态失真和相位失真。一个好的马达额定功率的失真一般会低于5%, 并且失真很大一部分由2 次和3 次谐波失真构成。
08带宽
带宽BW_3dB和BW_6dB: 使用额定电压、不同频率的step单频信号激励马达,获取加速度,对其进行数据处理,在f0的峰值一定频率区域来表示马达的带宽。具体如下:
BW_3dB带宽是频响峰值降低3dB的频率范围,BW_6dB带宽是频响峰值降低6dB的频率范围。如下图示例,该马达BW_3dB=7.6Hz,BW_6dB=13.4Hz。
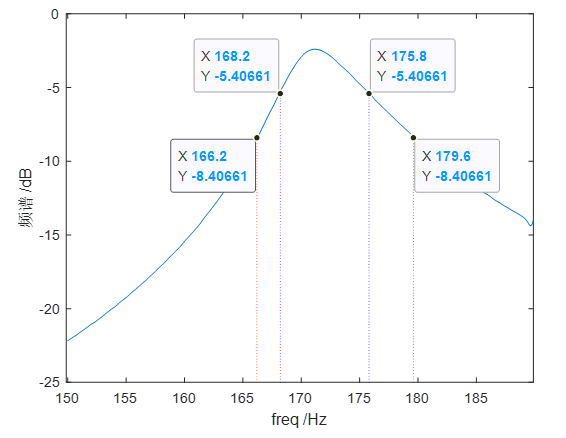
图8:带宽示例
09振动噪声
Noise: 消音室内,使用声级计在指定方向上正对马达或设备一定距离,采集马达工作时产生的声音,并对该声音进行数字信号处理,滤除主振动的声音,从而获取到杂振的声音,即为振动噪音。共有3个方向的噪音,分别是Noise-X、 Noise-Y、 Noise-Z。
整体来说,LRA马达作为触觉反馈技术的执行器,具有响应速度快,振动强度大,振动体验感觉细腻,功耗低,声学噪声小等优点,是触觉反馈技术的核心部件。但供电频率对其影响较大,谐振频率的细微偏移会使振动强度大幅下降减弱振动效果。LRA性能的好坏直接影响用户的触觉体验,因此,在了解了LRA各项技术指标之后,如何在不同的应用场景下,实现LRA马达的最优振动效果,提升用户触觉体验是当前亟待解决的技术问题。
审核编辑:汤梓红
-
瞬态响应的性能指标包括哪些2024-07-29 4009
-
10个天线性能指标的分析2023-11-27 9140
-
电缆性能指标测试方法2021-06-22 1582
-
参数变化和电路结构的改变对稳压电源性能指标有什么影响?2021-04-12 2436
-
极零点灵敏度对测试模拟和混合电路性能指标怎么实现?2021-04-08 1857
-
电气性能指标的具体分析2019-04-22 8225
-
PFC电感电气性能指标的具体介绍 (9.1)2019-04-01 6774
-
请问ZIGBEE的硬件性能指标都要测试哪些内容2018-08-17 4185
-
非电气性能指标的介绍2018-08-16 3861
-
负反馈组态对放大电路性能指标的影响2018-06-22 21833
-
电性能指标测试2012-08-17 3433
-
检测系统的性能指标2011-03-13 1268
-
不同类型UPS的输出电性能指标2010-12-17 2783
-
频率响应法-- 频域性能指标和时域性能指标的关系2009-07-27 13903
全部0条评论

快来发表一下你的评论吧 !
