

爱普生高精度惯性导航模块赋能无人割草机新赛道
描述
对于海外的消费者来说,家庭割草服务一直是一个难题。无人自动割草机很好地解决了这个痛点。但是无人割草机在工作时由于信号丢失造成的路径混乱一直困扰着生产商们。那么爱普生的陀螺仪产品是如何解决这个痛点的呢?
目前中国割草机制造商大多在采用厘米级GPS/北斗开发新的规划式割草机器人,厘米级GPS/北斗由于不需要大量布设信号设备以及精度足够高等优势,非常适合于家用割草机器人的定位应用,而且随着竞争的白热化,RTK模块的价格也在不断下降。
在实际应用中,由于家庭环境的复杂因素,如家中的树木遮挡以及半墙的遮挡等因素的干扰,RTK定位经常会出现丢失信号的问题,而且家用割草机器人一般移动速度比较慢,大约为30cm/s, 所以重新找回信号可能需要较长的时间,如何在丢失信号的情况下保持割草机器人正常工作成为每个制造商急需解决的问题。
目前大家在研究的主要方向为视觉和惯性导航,视觉导航能起到重要的辅助作用,但是视觉导航也存在一定缺陷,包括对光线的依赖,而且在草地场景区别不大的情况下无法清晰的识别。但是惯性导航完全不依赖外部因素,单纯依靠内部惯性器件运算就可以得出行驶的轨迹。当然惯性导航也有缺点,如果惯性器件的精度很低,随时间的增加角度偏移会越来越大。
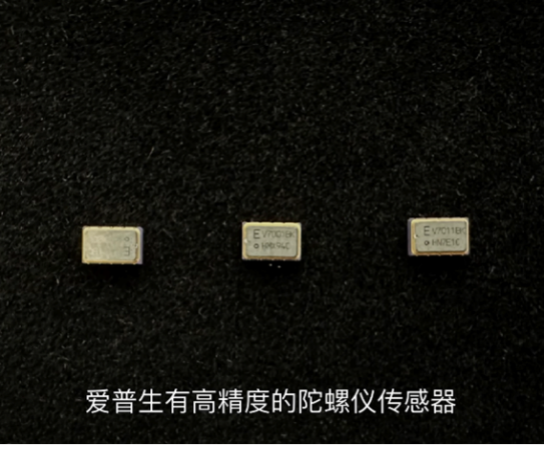
高精度陀螺仪
惯性导航器件(IMU)根据精度区分为多种规格,低端的IMU主要为陀螺仪芯片,精度一般为DPS(度/秒)级别,芯片级别陀螺仪一般没有经过温度补偿等校准,在割草机中精度只能保证在几秒到十几秒,如果时间稍微长一点就会偏差过大,芯片级别陀螺仪一般用在消费类电子的姿态识别上,如手机、游戏手柄; 中高端IMU主要以模块形式存在,精度单位一般为DPH(度/小时)几倍,在制造过程中一般会做温度补偿、正交补偿,在割草机工作的场景精度能保证到30分钟到1个小时。
爱普生针对智能割草机的痛点,联合第三方研发的SGPM01陀螺仪模块,应用爱普生的高精度陀螺仪传感器以及应用高端IMU的生产工艺制造而成。产品考虑到草地的复杂环境对IMU的精度要求以及工业消费电子对低成本的需要,会直接输出解算后的姿态角和偏航角。在割草机丢失RTK信号30分钟内,目前在普通草地实测的精度偏差为1小时5度左右*,达到割草机器人行业可接受的水平。
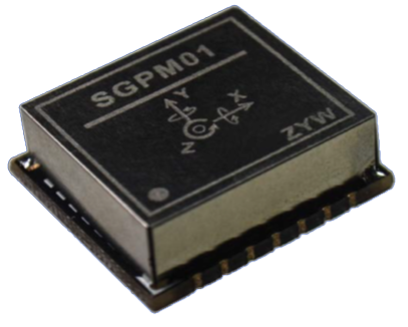
9轴陀螺仪模组
SGPM01是基于高性能陀螺仪传感器和加速度计,磁力计开发的模组,内置3轴陀螺仪和3轴加速度计传感器和3轴地磁传感器。依赖于高精度的传感器、高性能的处理器和高级的数字信号处理算法,输出非常稳定的角速度值,加速度值,磁力计和姿态角。模块可以支持UART,SPI数据通讯,产品总体尺寸为24*22*8mm。
产品特性
▋高精度9轴陀螺仪模组
▋输出三轴加速度值,三轴角速度值,三轴地磁,姿态角(Pitch,Roll,Yaw),温度
▋数字通讯接口UART和SPI
▋产品尺寸:24*22*8mm
▋低功耗
规格参数*
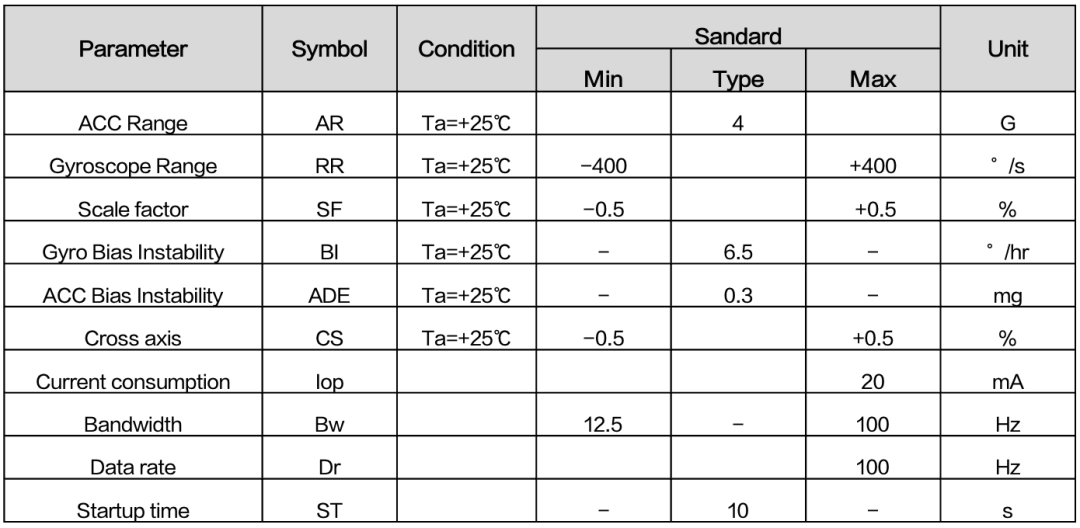
*文中产品数据源自第三方实验室,因使用和设置的不同,与实际数据可能存在差异。
-
高性能单片机车载惯性和GPS组合导航模块2017-08-30 3983
-
GPS北斗卫星+惯性组合导航模块的优势分析2019-07-15 3066
-
惯性导航模块特征和 优势有哪些?2020-08-13 2412
-
无感锂电割草机视频2022-04-09 15650
-
高精度北斗模块SKG10D北斗导航模块2017-06-27 2103
-
惯性导航和GPS卫星导航结合的车载组合导航模块资料2018-03-21 1633
-
看GPS+惯性组合导航模块怎么解决传统GPS导航5大信号难题2018-07-16 9371
-
怎样给割草机装上太阳能2018-09-11 5485
-
天工测控:高精度GNSS+INS组合导航模块SKG12UC2018-09-17 4977
-
MPU6050高精度6轴惯性导航模块的资料合集免费下载包含六轴绘图软件2018-11-21 1828
-
EPSON爱普生高精度惯性导航模块赋能无人割草机新赛道2023-12-19 2022
-
爱普生(EPSON)应用于割草机惯性导航高性能陀螺仪传感器SGPM012024-03-19 2492
-
爱普生高精度惯性导航模块赋能无人割草机新赛道2024-04-01 1558
-
AGV小车上的惯性导航模块运用——SGPM022024-05-13 2239
-
爱普生(EPSON) 惯性测量单元(IMU)、陀螺仪传感器等模块应用领域选型介绍2024-09-02 3085
全部0条评论

快来发表一下你的评论吧 !
