

机器视觉知识要点
电子说
描述
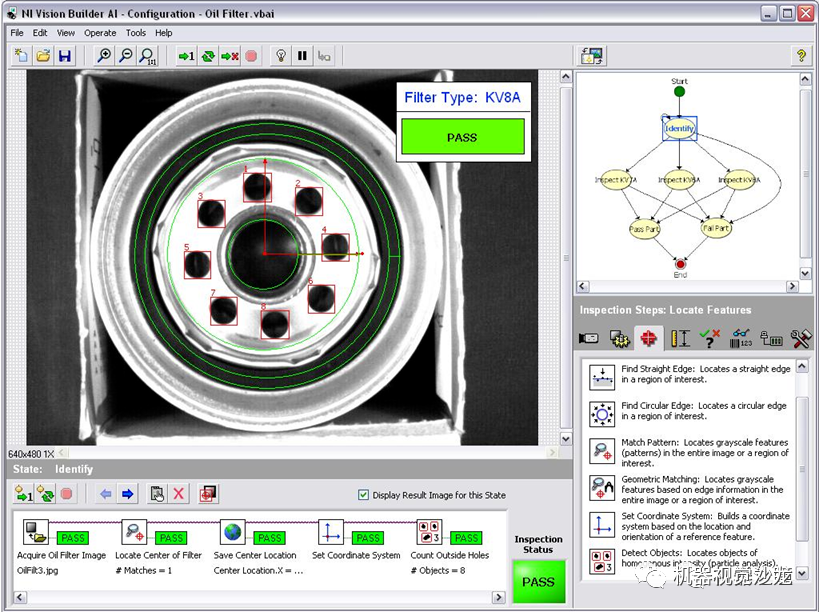
定位器
对象或特征的精确定位是一个检测系统或由视觉引导的运动系统的重要功能。传统的物体定位采用的是灰度值相关来识别物体。尽管这种技术得到了广泛的应用,但是,它在图象质量变差的情况下,就缺乏稳定性。图象质量变差可能是由于凌乱、亮度不同和遮盖等因素的影响。相反,几何对象定位法是一种最新的方法,它使用对象的轮廓来识别对象及其特征。一个可靠的定位器可不需要夹具来定位零件,因此节约了成本。
光学装置与照明
众所周知,适当的光学装置和照明对视觉应用的成功至关重要。有时,尽管选择了最合适的光学装置和照明,但是,如果被监测的对象或特征稍微变动一下,就要求相应改变灯光和照明亮度。例如,晶片的抛光表面的不同,在OCR应用中激光蚀刻的标志的质量的不同。使用适当的软件能让你消除必要的调光操作,无论其图象质量如何改变。
完整的工具集对绑在一起的多个工具
最终用户的应用将决定是使用一套完整的视觉工具集还是使用众多的特定的工具。视觉工具是一般的应用或算法,它能对图象或图象某个部分完成预定的任务。例如,一个斑点检测工具可以找出一组暗的或亮的象素,并测量出这个斑点的各种尺寸。选择一款视觉系统的重点在于拥有一套完整的视觉工具集。虽然你在作项目之初不需要所有的工具,但是,几年之后你的要求就会改变,对新的应用就可能需要另外的工具。
编程和操作方便

简洁、直观的图形界面是容易使用和设置的关键。当今机器视觉产品之间的主要区别在于他们的图形接口。接口应该从“设置”和“操作”这两方面来评价。对一个工程师来讲,它应该非常复杂,而对于一个操作者来说应非常简单。例如,一个视觉系统的校准应该简单得只点击几次鼠标,而不是象在火箭科学中的练习。
亚象素精度

视觉系统的分辨率是系统能分辨的最小特征,但实际上机器视觉算法具有亚象素的能力。也就是说,这些算法能够测量或得出比一个象素更小的单位,视觉工具的亚象素精度取决于图象的质量和算法的强大。
将来的升级
机器视觉系统可应用在各种场合,他们的应用范围可从时髦的摄像机到监视系统。当选择一个系统时应考虑系统将来的升级。几种供应商提供的通用视觉软件能为最终用户配置合适的照明、光学系统和视觉工具。专用软件包如BGA检测、OCR等也可当作预先配置好的软件出售。基于通用目的的视觉软件系统更好升级。最终用户应该根据附加的摄像机、照明的变化、视觉工具的变化等来考虑将来对系统的需求。例如,若一个需要多摄像头的系统,就要对一个基于图像捕捉卡的系统与一个基于时髦摄像机的系统的价格和灵活性进行对比。
图象预处理
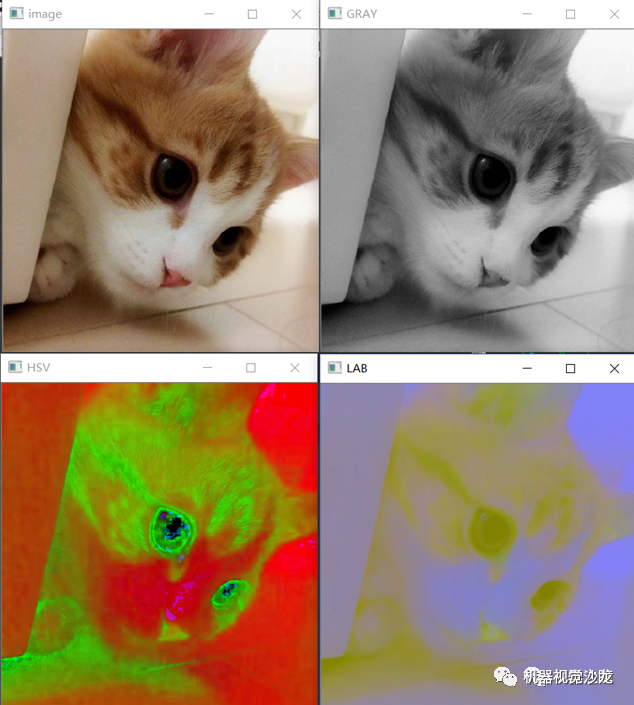
检测特征点和缺陷是非常的重要,不管亮度和对象表面或材料不同。图象预处理算法能把图象的特征点放大,以使视觉工具能更好的检测它们。同样,特征点也能被缩小,以至视觉工具可忽略它们。与此相似,滤波操作可用于输入图象的卷积。可得到如此广泛的预处理算法是复杂的视觉应用成功的关键。
视觉引导的运动

如果你的应用需要一个视觉系统来引导机器人,那么必须知道视觉系统与运动系统是如何集成的。对于校准和操作,没集成的运动系统与视觉系统是初步的系统,机械人或机构和视觉系统是分开校准的。在操作中,一台独立的视觉系统根据在视觉坐标系统中的已知位置计算出零件位置的偏移量,然后发指令给机器人的手臂在离初始化编程的拾取位置的偏移量处拾取零件。相反,一个集成系统控制器能在一个坐标系统中校准视觉系统和机器人。零件定位然后可定义与在机器人编程的相同的六自由度坐标空间。
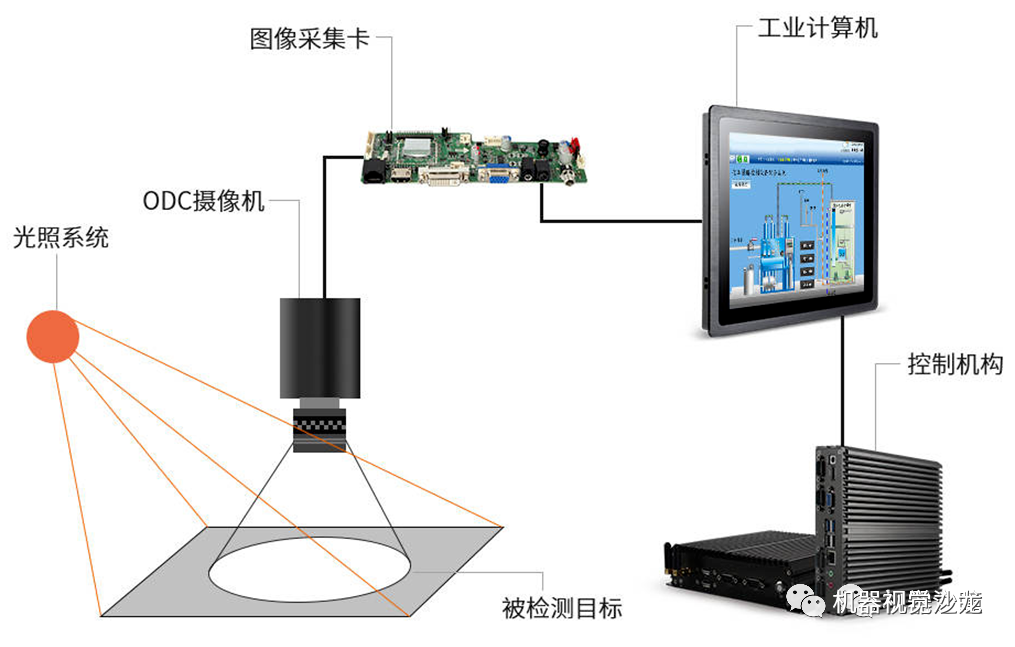
工厂层连接
目前,有各种与视觉系统通讯的方法,通用的接口象串口(RS-232)、RS-485、并口、Ethernet、Devicenet、数字I/O等。更新的接口如IEEE-1394和USB也得到了广泛的应用。当评估视觉系统时,要考虑工厂层的可连接性。典型地,机器视觉系统是一个与其它工厂层设备和工厂的信息系统接口的数据获取系统。一些供应商的软件能在局域网或因特网上对视觉系统进行远程操作。在特定行业,如药物,机器视觉系统对特定的应用被要求是独立的,从而确保设置不受远程操作的干扰。当选择一款视觉系统时,视觉系统的通讯接口是一个重要的考虑,不应该被忽视。
-
机器视觉与视觉检测知识点的归纳2023-10-07 603
-
机器视觉基础知识汇总2023-04-27 1860
-
机器视觉需要哪些基础_机器视觉行业发展前景2023-03-12 3148
-
机器视觉基础知识详解模板2021-05-28 1167
-
机器视觉系统基础知识与基本原理2021-05-27 1284
-
机器视觉系列——+Vision+基础知识2021-03-01 6082
-
一文让你搞懂机器视觉入门基础知识2020-10-27 8180
-
机器视觉自学需要学什么_学机器视觉好找工作吗2020-03-26 17924
-
龙哥线下机器视觉实训试听课2019-06-13 4122
-
机器视觉基础知识详解2018-03-16 13662
-
【下载】《机器人学、机器视觉与控制――MATLAB算法基础》2018-01-17 49595
-
科天健:机器视觉照明要点2016-05-10 4475
-
LabVIEW机器视觉基础系列汇总篇(含PDF)2015-01-22 138604
全部0条评论

快来发表一下你的评论吧 !
