

 RTK、PPP与RTK-PPP?一文带您认识高精定位及如何进行高精定位GNSS测试!(一)
RTK、PPP与RTK-PPP?一文带您认识高精定位及如何进行高精定位GNSS测试!(一)
电子说
描述
来源:德思特测试测量德思特干货丨RTK、PPP与RTK-PPP?一文带您认识高精定位及如何进行高精定位GNSS测试!(一)
欢迎关注虹科,为您提供最新资讯!
高精度定位与相关技术
随着全球定位技术的不断发展,人们对精准定位的需求也逐渐增加,GNSS技术已经成为了自动驾驶等许多关键领域的基础,而伴随着新兴技术的出现与硬需求,GNSS的定位精度要求也越来越高,因此高精定位技术也越发重要。
01****关于GNSS与定位精度
1****GNSS技术发展
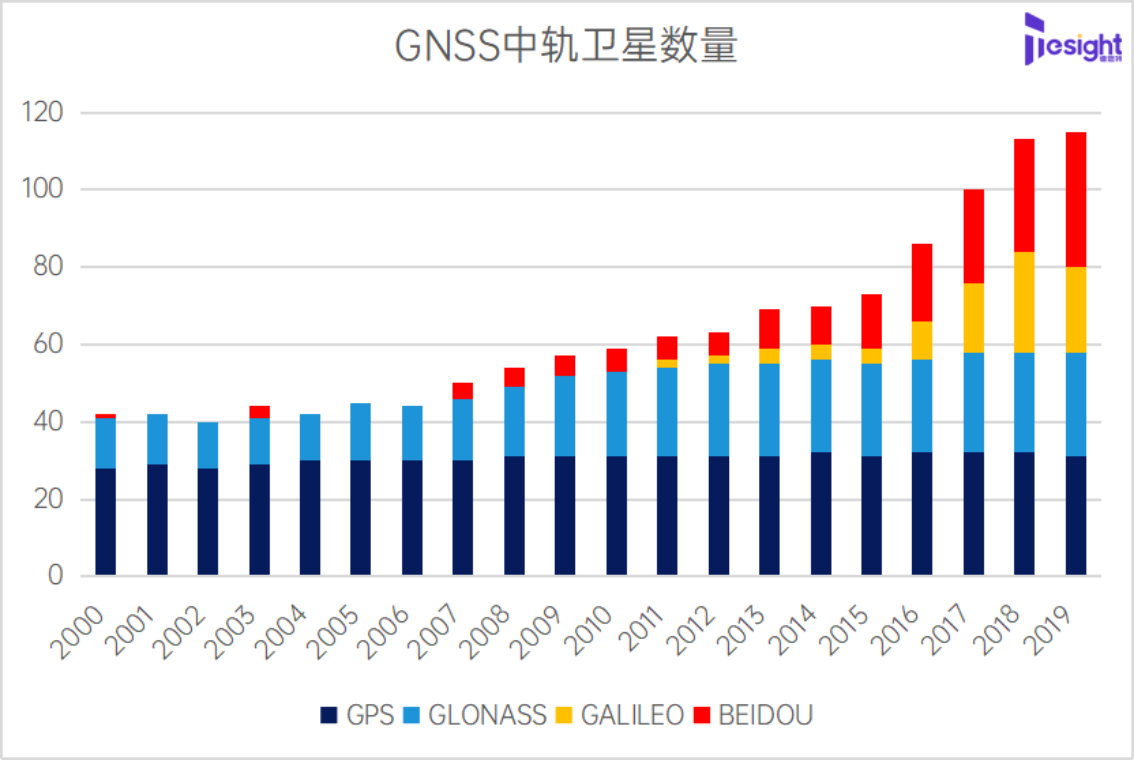
GNSS技术,即全球定位卫星系统,目前有美国的GPS、俄罗斯的GLONASS、欧洲的Galileo和中国的北斗,可以为全球用户提供高精度的定位、导航和定时服务。GNSS系统的卫星数量在不断增加,目前已经超过100颗。这意味着更多的卫星可用于提供全球定位服务,从而提高了定位的精确性和覆盖范围。
2 不同技术的定位精度
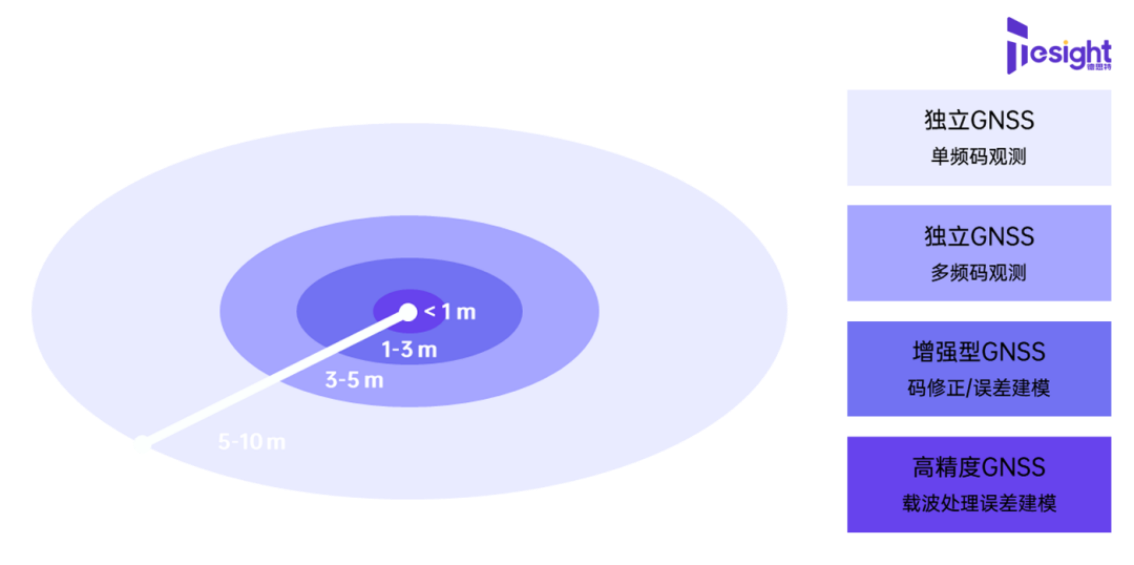
最初的GNSS接收器主要依赖于独立单频测量,其定位精度在5-10米左右。这种技术仅使用卫星的伪距数据来计算位置,精度有限。
在技术进步的推动下,多频接收器开始广泛使用,接收器能够同时使用不同频段的信号。这提高了信号的质量和精度,并有助于减小定位误差,其定位精度约在3-5m。
随着GNSS技术进一步发展,来越多的增强方法被应用到GNSS技术中,如基于伪距的距离修正和误差建模,允许对卫星信号的误差进行建模和校正,从而提高了定位精度。即通过纠正大气延迟、钟差、卫星轨道误差等因素,可以将位置精度提高到1-3米,可以实现在不同应用领域中的高精度定位,包括民航、农业、测绘等。
目前,GNSS技术已经演进到了能够实现高精度定位的阶段,包括使用载波处理技术来处理卫星信号,实施更精确的误差建模,以及采用RTK(实时差分定位)和PPP(精密点对点)技术。使用这些方法,定位精度可以进一步提高到小于1米,满足了对精准定位的高要求,如测绘、自动驾驶汽车、无人机和精密农业等领域的需求。
3 定位误差与消除方法
(1)误差来源
然而由于设备、环境、卫星位置等各种原因,GNSS定位不是完全准确的,会受到多种误差的影响,导致最终的定位有所偏差。常见的误差来源有:
●电离层误差(lonospheric errors)
●对流层误差(Tropospheric errors)
●卫星轨道误差(Satellite orbit errors)
●卫星时钟误差(Satellite clock errors)
●传输噪声与多径(RX noise and multipath)
●接收机时钟误差(Receiver clock errors)
●用户等效测距误差(UERE,user equivalent ranging error)
●水平精度因子(HDOP,horizontal dilution of precision)
(2)如何消除误差
对于电离层误差,其影响因素主要是仰角、频率、正上方电子总量TEC,我们可以通过嵌入klobuchar电离层模型参数进入导航信息,降低近50%的误差。此外,也可以通过多频方法,获取电离层自由伪距参数,采用距离校正计算,几乎可以消除电离层误差。
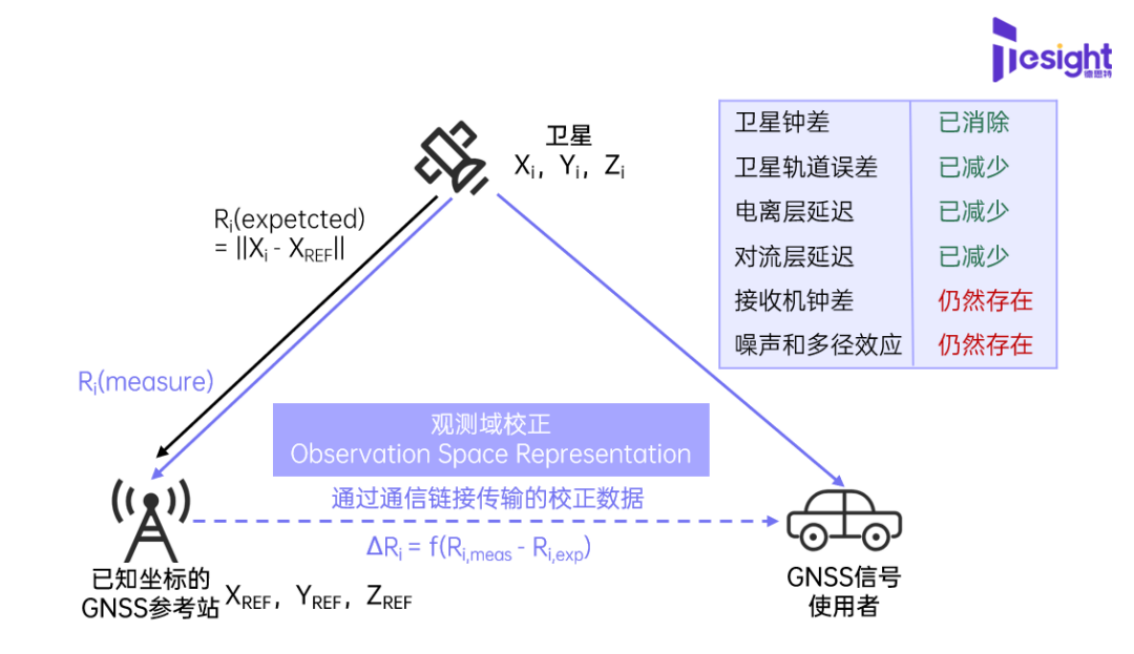
此外通过引入地面观测站的方式可以实现对卫星钟差、卫星轨道误差、电离层误差、对流层误差的减少或消除。根据覆盖区域和实现方式不同实现机制主要有两种:
●Observation Space Representation,观测域校正——小范围校正,直接利用基站进行校正信息传输,例如RTK。
●State Space Representation,状态域校正—— 大范围乃至全球覆盖,利用中心处理站解算与处理校正信息,并利用互联网,卫星网络等传输,例如PPP。
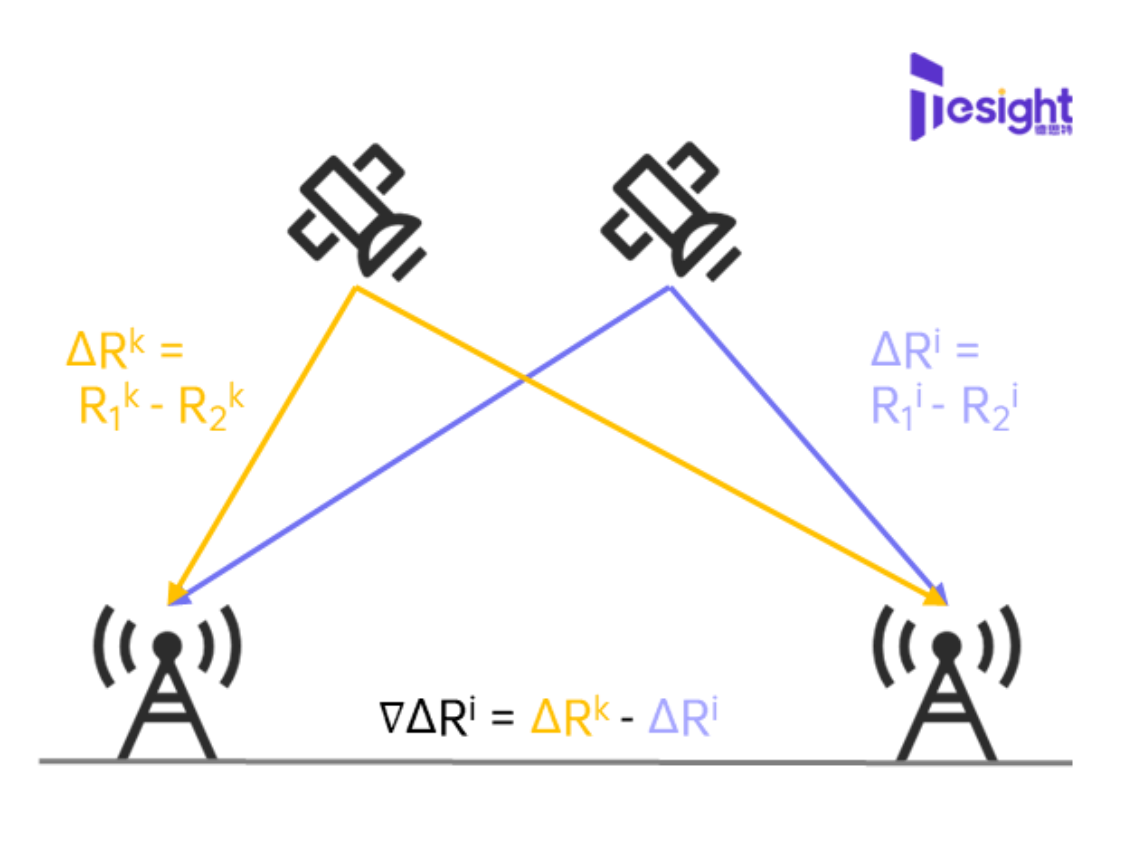
(3)通过双差分方式消除接收机误差
双差分(Double-Difference)是全球导航卫星系统(GNSS)定位中的一种差分定位方法,旨在减小或消除定位中的一些误差来源。与单差分定位不同,双差分同时考虑了两个接收器之间的相对位置差异以及两个卫星之间的相对位置差异。这个方法在相对定位和高精度定位应用中非常有用。通过该方式可以有效减小或消除卫星钟差、卫星轨道误差、电离层误差、对流层误差,此外还可以消除接收机钟差。
(4)其他办法
此外,可以配之其他复杂方法,削弱或消除多径与噪声影响,如载波模糊度解算与基线处理。
02****RTK、PPP与RTK-PPP技术
1 RTK技术
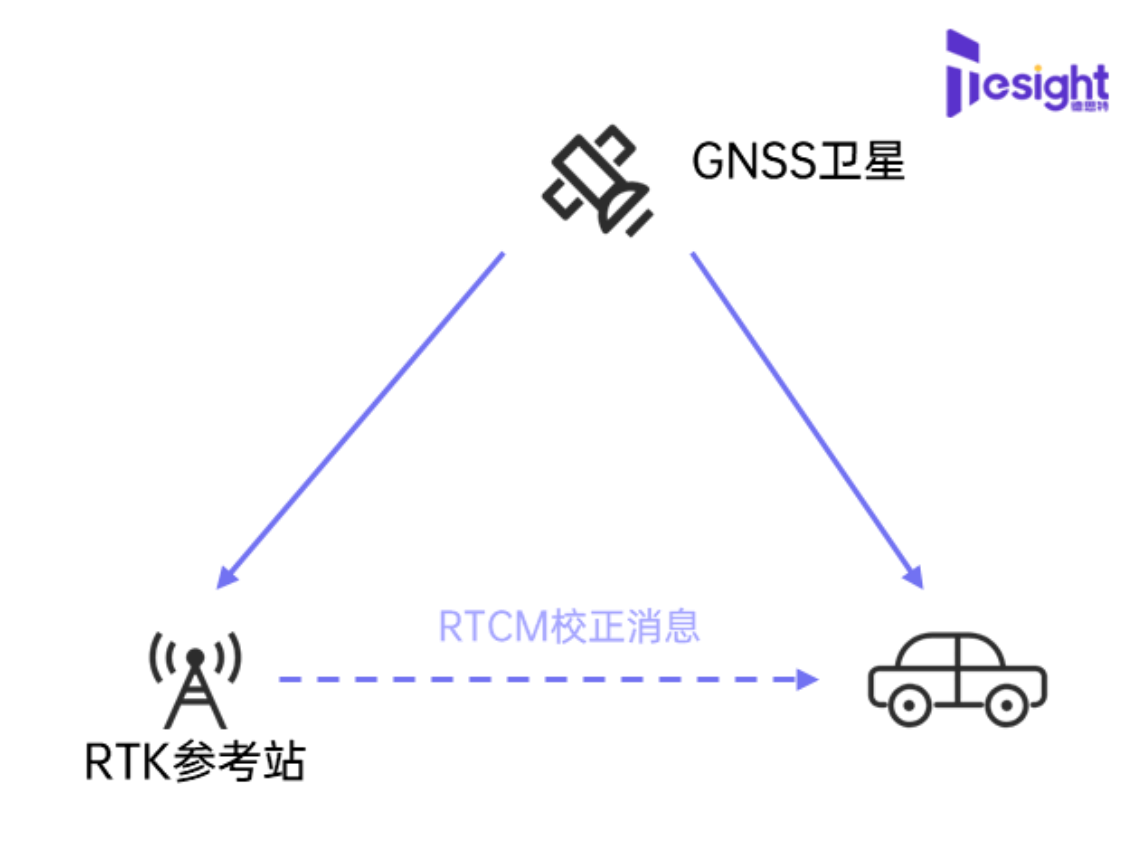
RTK(Real-Time Kinematic)技术基于两个GNSS接收器,其中一个充当基准站,另一个作为流动站。基准站精确定位并连续跟踪卫星信号,同时记录数据,而流动站接收卫星信号以定位自身,并从基准站获取包含校正数据的RTCM信息来通过差分运算校正误差。这一过程实现了毫米级的高精度三维实时定位,依赖于实时传输的校正数据,适用于测绘、建筑、农业、无人机导航等多个应用领域。
RTK技术的主要特点是在实时中提供毫米级别的定位精度。RTK是基准站与流动站之间的直接校正信息传输,因此可以解决卫星、传输轨迹以及接收机本身的误差问题,但覆盖区域小,并且精度随着两者之间的距离增加而降低。
2 PPP技术
PPP(Precise Point Positioning)技术是一种高精度的全球导航卫星系统(GNSS)定位技术,它是一种广域的部署方案,通过CPF解算卫星误差并传输给接收机做校正,允许用户实现毫米级的三维位置精度,而无需依赖差分基站。与差分定位技术不同,PPP技术不需要在接收器和差分基站之间建立通信链接。用户只需单独的GNSS接收器和访问PPP校正数据的互联网连接,即可进行高精度定位。PPP技术适用于全球范围,因为它不依赖于特定地理区域内的差分基站,只需有足够的卫星可见性即可进行定位。但通常需要更长收敛时间的卫星信号观测来实现高精度,因此对于需要长时间持续定位的应用更为适用。

3 二者的对比
本质上来讲,这两种技术都是在传统GNSS定位的基础上,使用增强技术来提高GNSS定位精度的,是在不同校正域上的延伸与实现。

4 PPP-RTK技术
在上述的介绍中可以发现,RTK技术与PPT技术各有优劣——RTK定位时间快,但是覆盖距离小;PPP定位精度高,全球覆盖,但是收敛时间慢,且部署成本较高。随着需求和技术的发展,将PPP与RTK结合的技术(PPP-RTK)也出现了。
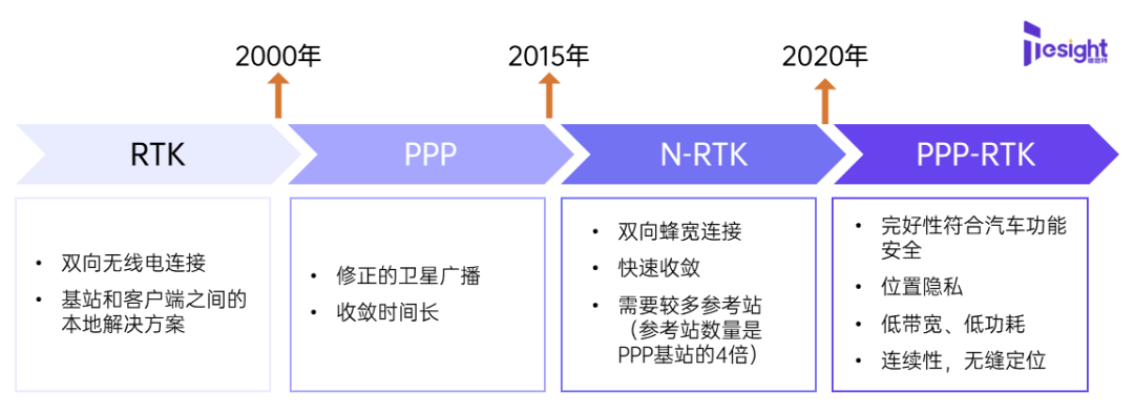
PPP-RTK是未来的主流与趋势,PPP-RTK状态域具备完好的服务优势,可以实现全覆盖、高精度、收敛快的高精度GNSS定位技术。
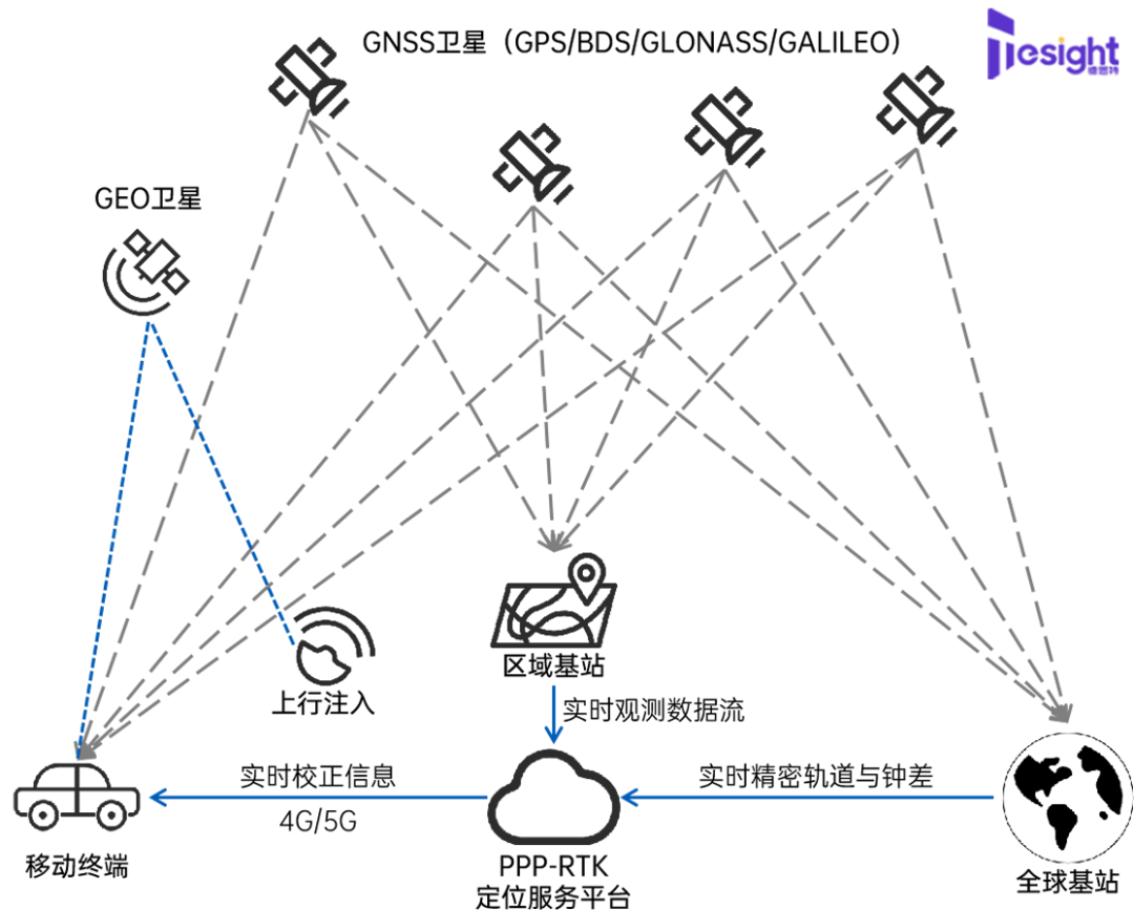
其主要原理为使用全球基站确定卫星钟差、卫星轨道误差;使用区域基准站对电离层误差、对流层误差等区域性误差进行了分析,建立整网的电离层延迟、对流层延迟等误差模型;并将全球和区域的误差产品发送给移动终端进行定位。总的来看,具有以下优势:
●全国覆盖
PPP-RTK仅需不超过1000基站即可实现全国覆盖,极大减少基站建设的成本投入,提高服务覆盖范围。
●单向播发
PPP-RTK采用单向广播模式,更易实现海量用户并发。同时,单向播发的服务模式能有效的保护用户隐私。
●连续性
PPP-RTK对各项误差采用广域统一建模,提供全国范围内的无缝连续定位服务。
●完好性
PPP-RTK通过将GNSS各类误差分别建模并提供给用户,各类误差相互独立,可分别进行完好性监测并生成相应的完好性产品,实现功能安全。

END
以上为高精度定位与相关技术(一)的主要内容,在下一章德思特将为大家介绍如何进行高精度GNSS测试和自动驾驶与高精度定位的其他技术等内容。
-
如何破解户外机器人定位测试困局2026-07-09 48
-
RTK vs PPP vs RTK-PPP:一文搞懂高精度定位2026-06-18 319
-
德斯特干货|RTK/PPP/RTK-PPP毫米级 高精定位 怎么测?德思特GNSS模拟器带来高效测试方案 |2026-05-13 505
-
车载高精度定位的 “硬核技术”:PPP-RTK 轻松懂2026-04-13 563
-
德思特方案|突破户外测试局限:德思特GNSS仿真方案赋能机器人高精定位2026-02-24 2459
-
精讯畅通发布RTK+4G定位模块,开启厘米级定位新时代2025-01-03 1963
-
AT372-6P杭州中科微GNSS单频RTK高精度定位模块datasheet2024-08-20 2236
-
RTK、PPP与RTK-PPP?一文带您认识高精定位及如何进行高精定位GNSS测试!(二)2023-12-20 1664
-
TAU1308 多系统 RTK 定位模块2023-09-07 1482
-
TAU1312 多系统多频 RTK 定位模块2023-09-06 1378
-
自动驾驶高精定位的PPP-RTK可行的系统架构设计方案2023-05-23 1703
-
您了解RTK技术吗?—— 揭秘GNSS中的定位技术2023-01-09 7162
-
GNSS 多星定位原理及校正方式对比2022-06-28 1747
-
PPP已成为RTK,瞬时实现厘米级GNSS全球定位2020-12-25 4975
全部0条评论

快来发表一下你的评论吧 !
