

仿皮肤电容式柔性触觉传感器研究
MEMS/传感技术
描述
通过将基于微/纳结构的柔性压力传感器集成到机器人中,可以实现灵敏的触觉感知。然而,例如金字塔和半球等传统对称结构,只能感知力的大小,却无法感知力的方向。触觉不仅由压力引起,还由剪切力和摩擦力所引起,其方向和大小都很重要。
据麦姆斯咨询报道,由中国科学院沈阳自动化研究所机器人学国家重点实验室与河南农业大学机电工程学院组成的科研团队在Advanced Science期刊上发表了以“Skin-Inspired Capacitive Flexible Tactile Sensor with an Asymmetric Structure for Detecting Directional Shear Forces”为主题的论文。该论文的第一作者兼通讯作者为于海波研究员,另一位通讯作者为刘连庆研究员。
受皮肤结构的启发,这项研究设计了一种基于非对称微毛发(microhair)结构阵列的电容式柔性触觉传感器,用于感知剪切力及其方向。通过双光子聚合(TPP)和复制得到了非对称微毛发结构。由于微毛发结构的非对称特性,不同的剪切力方向会导致不同的变形。因此,该研究所设计的器件既可以确定静态剪切力方向,也可以确定动态剪切力方向。
研究人员从皮肤结构获取灵感,设计了倾斜微毛发阵列(TMHA)结构,作为电容式触觉传感器的介电层。人体皮肤是一个综合系统,包括表皮层、真皮层和皮下组织,以及众多的机械感受器,如图1a所示。倾斜毛发结构表现出仿生特性,可用于制造基于TMHA的触觉传感器,如图1b所示。图1c至图1e展现了基于TMHA的介电层的扫描电镜(SEM)图像。
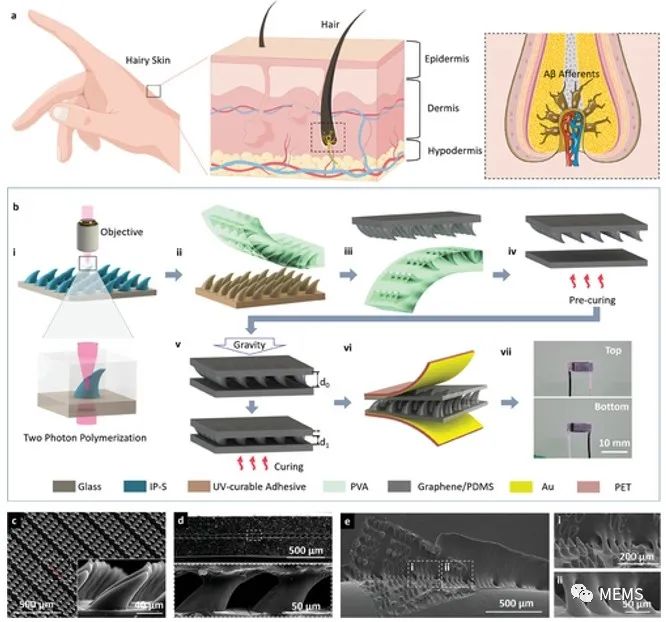
图1 基于TMHA的触觉传感器的仿生机理、制造工艺及表征
随后,研究人员模拟了TMHA的变形,以便研究介电层间隙在压力与双向剪切力载荷作用下的响应。相关模拟结果如图2所示。
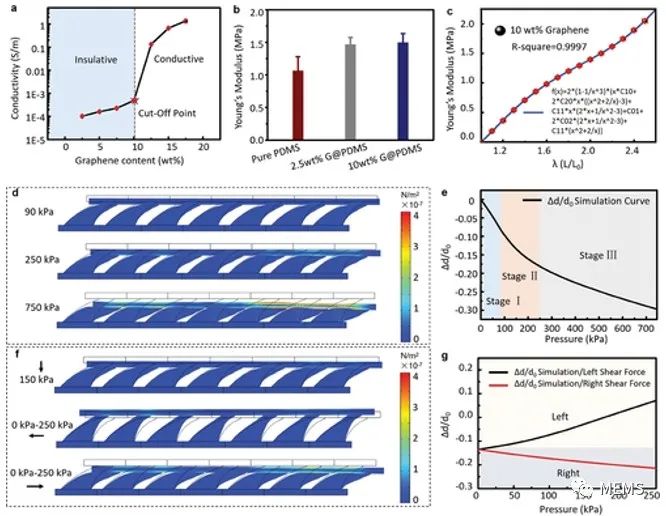
图2 基于TMHA的触觉传感器的COMSOL模拟结果
基于TMHA的电容式传感器在低压状态下具有宽压力响应范围和高灵敏度。触觉传感器的压力传感机理如图3c所示。
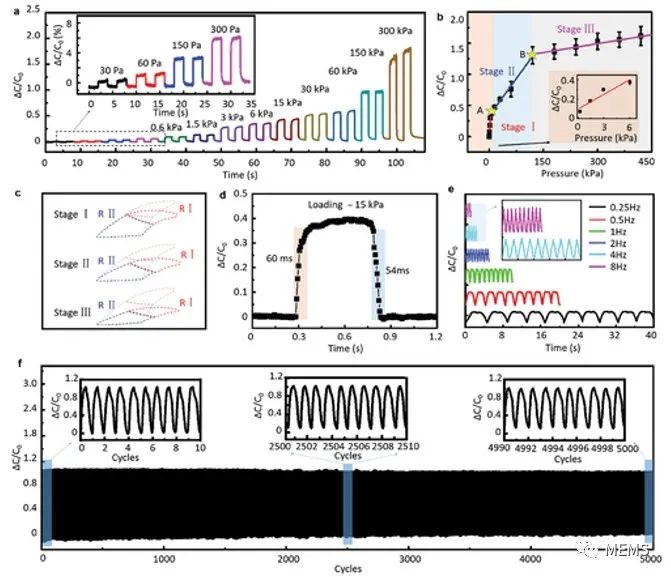
图3 基于TMHA的触觉传感器的压力传感特性
对方向性剪切力作用下的介电层间隙的模拟表明,基于TMHA的电容式传感器的信号趋势可以区分剪切力。触觉传感器的剪切力传感机理如图4a所示。
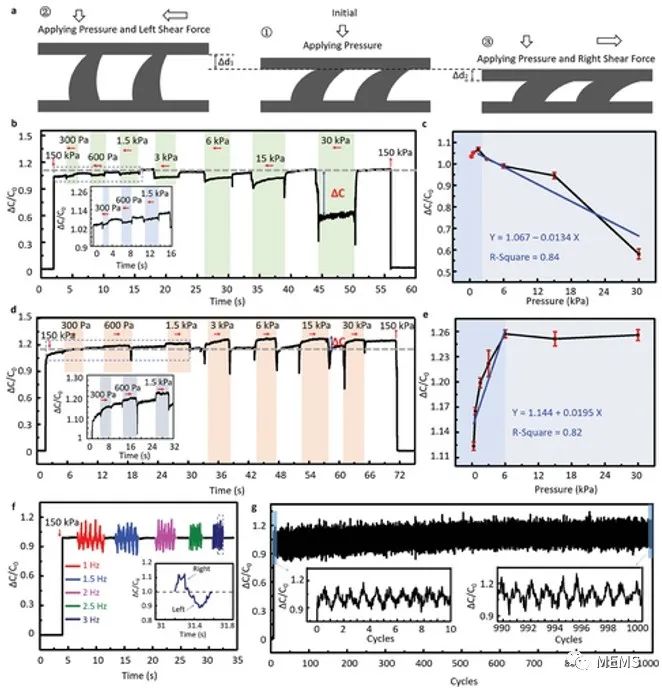
图4 基于TMHA的触觉传感器的剪切力传感特性
接着,基于TMHA的触觉传感器还显示出了集成于灵巧手中的潜力,凭借其灵活性、敏感性和适应性等特点可实现人机交互。集成基于TMHA的触觉传感器的灵巧手的应用案例如图5所示。
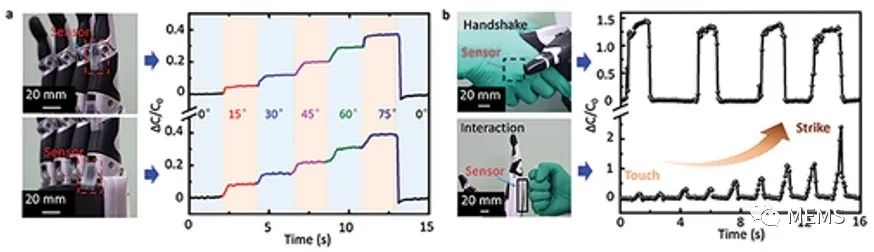
图5 集成基于TMHA的触觉传感器的灵巧手应用案例
最后,为了提高机器人在精细操作任务中的感知度和精度,在机器人的拇指上安装了基于TMHA的触觉传感器作为触觉电子皮肤(e-skin)。相关实验情况和结果如图6所示。
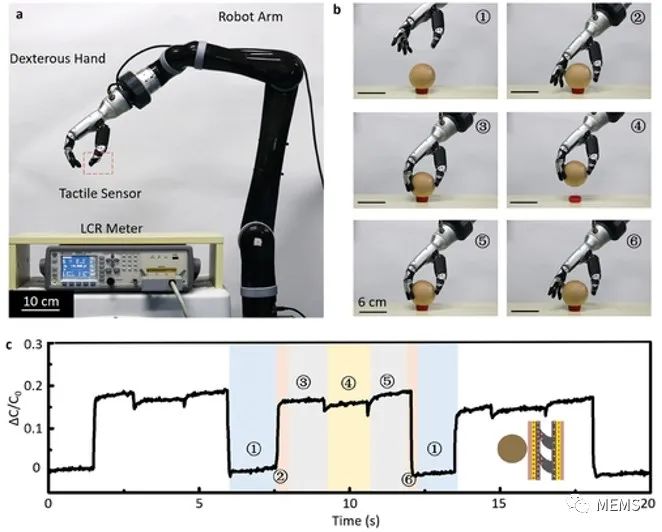
图6 集成基于TMHA的触觉传感器的机械手在抓取实验中的应用
综上所述,这项研究提出了利用基于TMHA的触觉传感器来感知压力和剪切力。TMHA的非对称结构在不同方向剪切力的作用下可产生不同的弯矩。基于TMHA的触觉传感器在压力和剪切力传感方面表现出较高的灵敏度和稳定性。此外,该研究还尝试在机器人和灵巧手上集成基于TMHA的触觉传感器,以增强其交互性能和安全性。机器人抓取实验证明了该传感器在机器人触觉反馈系统中的应用潜力。此类触觉传感器为未来剪切力传感器的设计提供了新发展方向,同时还可应用于开发人机界面。
审核编辑:黄飞
-
最新分析:触觉传感器技术演化,电子皮肤市场空间将达155亿元2025-08-18 186797
-
“电子皮肤”,人形机器人的柔性触觉传感器2025-04-07 6716
-
中山大学:在柔性触觉传感电子皮肤研究进展2025-02-12 2361
-
自研电容式多通道触觉压力传感器介绍资料(v12025-01-15 544
-
一种模拟皮肤触觉的柔性仿生光纤触觉传感器2023-11-24 3564
-
厦门大学:给机器人穿上灵敏“皮肤”!柔性触觉传感器研究有了重要进展2022-11-17 2576
-
厦门大学:在柔性触觉传感器领域取得重要进展2022-11-09 1904
-
一种具有屏蔽电磁干扰特性的柔性电容式力传感器2022-08-17 3714
-
电容式传感器的工作原理以及电容式传感器的特点2020-12-18 51686
-
电容式传感器有哪些_电容式传感器的应用场合2019-11-08 29801
-
电容式传感器的分类及原理2010-11-29 21532
-
电容式传感器简介2009-11-23 3060
-
实验:电容式传感器2009-03-06 8835
-
电容式压力传感器2008-01-07 3484
全部0条评论

快来发表一下你的评论吧 !
