

 RTK、PPP与RTK-PPP?一文带您认识高精定位及如何进行高精定位GNSS测试!(二)
RTK、PPP与RTK-PPP?一文带您认识高精定位及如何进行高精定位GNSS测试!(二)
电子说
描述
来源:德思特测试测量德思特干货丨RTK、PPP与RTK-PPP?一文带您认识高精定位及如何进行高精定位GNSS测试!(二)
原文链接:https://mp.weixin.qq.com/s/BM9UYTctDcfgp88iQ01ryQ
欢迎关注虹科,为您提供最新资讯!
上一篇文章介绍了GNSS与定位精度和RTK、PPP与RTK-PPP技术。本章将继续为大家介绍如何进行高精度GNSS测试、自动驾驶与高精度定位的其他技术。
03****如何进行高精度GNSS测试
可以看到近些年依托于GNSS的高精定位技术发展迅猛,大量的新技术,新应用,新方向层出不穷。如何在项目前期进行相关算法、环境、项目与技术的测试与检验,成为了一个重要的话题。
1 怎么样的GNSS测试方法是好的测试?****
(1)可重复性,可控性
进行高精度的GNSS测试需要在可重现和可控的环境中对GNSS接收器进行测试,特别是在项目的初期,当有很多参数和特性还不清楚时。通过高效且准确地控制测试场景和环境,可以实现精确的一致重复性测试,这对于项目的快速推进和问题的解决至关重要。
(2)可操作性
进行GNSS测试需要能支持对于设备与系统的实时操作,例如按照特定需求来设置制定的时间、地点信息,注入特定的“错误”和相应的校正数据等,用于对设备进行确定性验证与可预期的功能测试。
(3)HIL能力:
伴随着GNSS与定位导航产品的集成度越来越高,GNSS测试需要能够接入现有系统进行实时在环仿真,允许工程师近乎真实的模拟与测试应用场景,以验证其性能和功能,减少潜在风险,加快产品开发,并提高系统质量,因此要求测试能够支持在组件或整车级别将系统作为“黑匣子”进行测试。
(4)实时性:
在测试GNSS时,尤其是应用HIL仿真方式时,需要能够使用来自实时GNSS的实时网络校正数据进行测试。系统的延迟越低,实施性越好,在自动驾驶与高精定位行业的应用是十分重要的,一方面有助于真实模拟极限情况下的决策与响应能力,另一方面如果延迟太高,就会导致测试系统的实际响应与实际硬件的响应之间存在差异,从而影响测试的准确性。高延迟可能导致测试结果不可靠,甚至误导性,因此需要尽量降低延迟以获得可靠的HIL测试结果。
(5)性价比:
由于高精GNSS测试需要对现有的测试方案做改进,在面向新兴应用时都希望测试系统足够高效,减少所需的时间和资源;此外,在面对测试标准与方式有改变时,现有测试方案可以快速迭代、改变并无需花费大量的成本。
2 测试方法
GNSS模拟器是GNSS高精测试的关键产品,是基于软件定义架构的GNSS模拟器,是依托“依托软件引擎,开放硬件平台,高效开放地完成GNSS仿真”的自有Skydel GNSS仿真引擎的全面解决方案。
GNSS模拟器可以模拟接收机的接收口径上的GNSS信号,模拟不同卫星的信号(包括位置、速度、时间信息),模拟误差和干扰,如多径效应、大气延迟等,实现近乎真实的场景模拟。
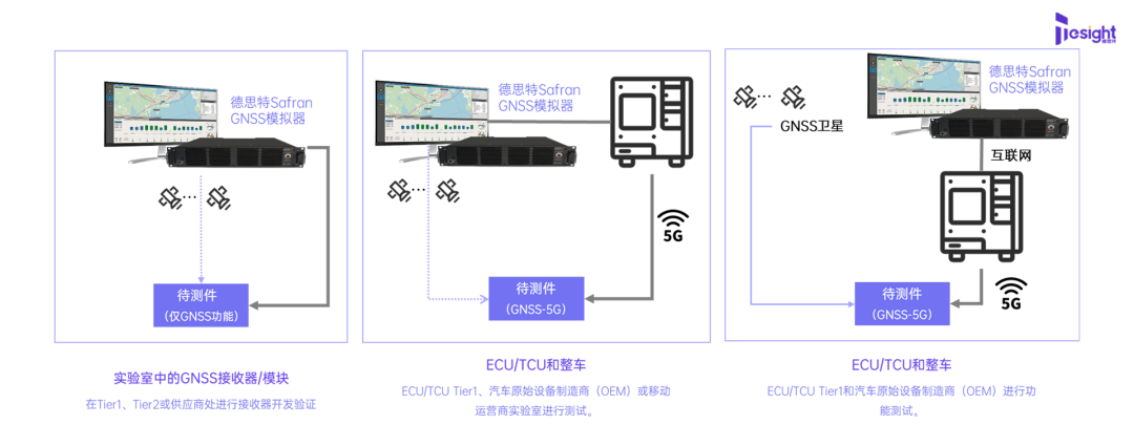
可以帮助用户最大程度上高效快速的完成各阶段测试:
① 在Tier1、Tier2或供应商处进行接收器开发验证,通过辐射或传导方式对待测件的GNSS功能做实验室级别测试。
② ECU/TCU Tier1、汽车原始设备制造商(OEM)或移动运营商实验室进行前期的ECU/TCU和整车的GNSS功能测试,结合基站模拟器完成对GNSS+5G的融合测试。
③ ECU/TCU Tier1和汽车原始设备制造商(OEM)进行完全迫真的GNSS全面功能测试,完成结合5G,GEO网络,RTK/PPP基站等的全面高精度GNSS定位测试,对RTK,PPP,RTK-PPP设备的功能与性能进行完整的验证与测试。
GNSS仿真测试在未来自动驾驶等新兴领域中扮演着至关重要的角色,用于提前确保定位导航功能的可靠性。GNSS模拟器是实现GNSS高精度测试的关键工具,为用户提供了可控和可重复的测试方案,同时允许用户实时编辑和定义自己的GNSS仿真测试场景。利用GNSS模拟器,用户可以实现小于5 ms延迟的HIL闭环仿真,使测试尽可能接近真实情况。该模拟器基于软件定义架构,为用户提供了灵活性和可扩展性,使其能够适应未来测试需求的变化;而这样的架构,不仅保证了整体成本的合理性,还提供了出色的性价比。
04****自动驾驶与高精度定位的其他技术
1 什么是POS?****
高精度POS(positioning and orientation system)即定位定姿系统,是指一种精确测量和确定物体在地球表面或三维空间中的准确位置的技术。高精度POS通常倚赖卫星导航系统(如全球定位系统,GPS)的精确测量,以及其他传感器(如惯性测量单元,IMU)和校准技术,以提供高精度的位置信息。
在自动驾驶领域里,随着自动驾驶技术的成熟和自动驾驶行业的逐渐发展,对数据精度的要求越来越高,其中高精度POS将逐步取代GNSS定位与IMU作为源数据的来源,提供更高精度、形式更丰富的自动驾驶数据。

2 什么是DGNSS?
差分全球导航卫星系统(DGNSS),是对GNSS的增强,旨在纠正GNSS系统中的部分错误和不准确性,从而提供更准确的定位信息。通常,访问校正信息可使差分GNSS接收器比其他接收器更准确;消除这些误差后,GNSS接收器有可能达到高达10厘米的精度。
该系统所基于的假设是,彼此非常接近(例如,在几百公里内)的任何两个接收器都将经历相同的大气误差。因此,差分GNSS使用至少两个GNSS接收器。一个接收器必须位于一个精确的已知位置;这个接收器用作基站或参考站,另一个称为流动接收器。基站接收器计算其由GNSS卫星计算出的位置与其实际已知位置之间的差异。差异是纠错因子,然后将其传输到流动接收器(或多个流动接收器)以校正其测量结果。可以使用无线电信号在现场实时应用更正后的信息。
差分GNSS可以使用固定的地面参考站网络来发送GNSS卫星广播的位置与已知固定位置之间的差异。DGNSS可以指任何类型的地基增强系统(GBAS),全世界有许多正在使用的地面系统。
从轨道卫星而不是地面发射器传输校正的类似系统称为WAAS(广域增强系统)或WADGPS(广域差分全球定位系统)。有时作为同义词使用,基于卫星的增强系统 (SBAS) 可以包括轨道卫星系统,它已在世界其他地区实施,例如EGNOS、MSAS、QZSS和GAGAN。如今,大多数商业GNSS接收器都支持一种带有SBAS的差分校正形式。
RTK就是在DGNSS的基础上,进一步利用卫星信号的载波相位对这种情况进行了修正,因此可以使定位精度进一步达到厘米级。
3 什么是A-GNSS?
A-GNSS(Assisting-GNSS,辅助GNSS,又称网络增强卫星定位系统 )是一种GNSS增强系统,通常可以显着提高全球导航卫星系统(GNSS)的启动性能,即首次定位时间(TTFF)。利用普通的移动通信网络,传送增强校正数据,加强或者加快卫星导航信号的搜索跟踪性能与速度,可以明显缩短接收机的首次定位时间,同时可以在受到一定遮挡的情况下(或者半开阔区域),也能实现卫星导航定位。
所提供的辅助信息,包括导航卫星的历书、星历、频率范围、标准时间和近似位置等。通过提供辅助信息,使GNSS接收机在捕获之前就知道应该捕获的频率范围,然后辅助数据再提供用来计算GNSS用户位置的卫星所在位置。一旦捕获卫星信号后,剩下的工作就是伪距的测量(仅仅需要几毫秒,而不是几分钟),然后A-GNSS接收机开始计算用户的位置。首次定位时间从1分钟或者几分钟量级缩短到1秒量级。此外,由于A-GNSS接收机被设计为预先知道需要搜索哪个频率,接收机的信号搜索跟踪过程就变得较为简单,有针对性地压缩接收机搜索频带,降低噪声带宽,增加信号能量的累计时间,从而增加了A-GNSS接收机的灵敏度,并允许它捕获更弱的信号。
审核编辑 黄宇
-
GNSS 多星定位原理及校正方式对比2022-06-28 1748
-
TAU1312 多系统多频 RTK 定位模块2023-09-06 1378
-
TAU1308 多系统 RTK 定位模块2023-09-07 1483
-
百度Apollo高精定位方案分析2018-10-02 19944
-
PPP已成为RTK,瞬时实现厘米级GNSS全球定位2020-12-25 4983
-
自动驾驶高精定位的PPP-RTK可行的系统架构设计方案2023-05-23 1707
-
您了解RTK技术吗?—— 揭秘GNSS中的定位技术2023-01-09 7177
-
RTK、PPP与RTK-PPP?一文带您认识高精定位及如何进行高精定位GNSS测试!(一)2023-12-19 2718
-
RTK、PPP与RTK-PPP?一文带您认识高精定位及如何进行高精定位GNSS测试!2023-12-20 6045
-
AT372-6P杭州中科微GNSS单频RTK高精度定位模块datasheet2024-08-20 2276
-
精讯畅通发布RTK+4G定位模块,开启厘米级定位新时代2025-01-03 1972
-
德思特方案|突破户外测试局限:德思特GNSS仿真方案赋能机器人高精定位2026-02-24 2474
-
车载高精度定位的 “硬核技术”:PPP-RTK 轻松懂2026-04-13 590
-
德斯特干货|RTK/PPP/RTK-PPP毫米级 高精定位 怎么测?德思特GNSS模拟器带来高效测试方案 |2026-05-13 517
-
RTK vs PPP vs RTK-PPP:一文搞懂高精度定位2026-06-18 353
全部0条评论

快来发表一下你的评论吧 !
