

移动机器人调度系统典型应用案例
机器人
描述
随着移动机器人在企业的深度应用,一些潜伏的问题开始引起重视:如何优化移动机器人利用率,满足业务高峰节拍?如何减少机器人拥堵死锁,提高效率?多机种协作、多区域运行、多设备交互应如何实现?事实上,这一系列问题有一个共同的答案,那就是移动机器人调度系统。 在某知名汽车品牌刚投入使用的智能工厂中,一辆无人驾驶平衡重叉车式机器人在前往物料暂存区搬运货物的途中偶遇了一辆载着货架的AGV机器人,俩“人”远远地打了个招呼,轻移脚步擦身而过。 从前在科幻电影中见到的场景,如今在各个制造工厂、仓库中已屡见不鲜。 近年来,随着我国数字化转型、智能升级的脚步加快,企业对机器人的需求逐年增加,机器人产业进入快速发展期,尤其是以AGV、AMR、无人叉车等为代表的移动机器人市场规模更是扩张迅速。从数据上来看,我国移动机器人市场规模由2018年的34.96亿元扩大至2022年的96.73亿元[1]。2023年前三季度移动机器人领域共发生20起融资事件,融资总额累计超过12亿[2]。 不过,随着移动机器人在企业的深度应用,一些潜伏的问题开始引起重视: ◉ 如何优化移动机器人利用率,满足业务高峰节拍? ◉ 如何减少机器人拥堵死锁,提高效率? ◉ 多机种协作、多区域运行、多设备交互应如何实现? 事实上,这一系列问题有一个共同的答案,那就是移动机器人调度系统。
移动机器人调度系统概览
目前,移动机器人的调度大致可以分为两个部分,一个是依靠移动机器人自身搭载的车载控制系统,能够进行简单的车辆驱动、导航、导引和路径选择等功能,另一部分则是发布指令的核心上位系统,即移动机器人调度系统。 移动机器人调度系统向上连接MES、WMS等上游系统,向下管理区域内所有移动机器人,能够对管辖区域内资源进行配置管理与动态分配,对各类移动机器人进行任务指派、调度协同和交通管制,以提高移动机器人的工作效率,实现多台移动机器人协同作业,是名副其实的移动机器人“指挥官”。 移动机器人调度系统通常由以下几个模块组成:

图1 移动机器人调度系统功能
地图构建模块:该模块通常负责生成和维护移动机器人工作场景地图。通过移动机器人搭载的传感器(如激光雷达、摄像头、超声波传感器等)感知周围环境,并上传至地图构建模块;地图构建模块会对收集到的传感器数据进行处理和滤波,以消除噪声和异常值,提高地图的准确性和稳定性;通过分析数据,地图构建模块会提取环境中的特征信息,并将提取到的信息转化为地图表现形式,通常有栅格地图或拓扑地图两种,栅格地图将环境划分为网格单元,每个单元表示一种状态(如自由、占据、未知等),拓扑地图则侧重于描述环境中不同位置之间的关系。地图构建模块支持实时地图更新,随时反映环境变化。构建的地图将为移动机器人的导航、路径规划和决策等任务提供支持。
交通管制模块:通过移动机器人搭载的传感器,交通管制模块能对场景内交通状况进行实时监测,包括拥堵程度、碰撞事故等情况。对交通数据进行收集、分析后,交通管制模块可以实现交通状况的预测,基于实时交通数据和预测结果,交通管制模块可以及时优化移动机器人的路线,并与调度系统中的其他模块进行实时通信,如任务调度模块等,及时改变调度策略,实现全局的交通调度和协同,提高移动机器人的运行效率。
任务调度模块:任务调度模块是移动机器人调度系统中的核心模块。当它接收到来自上层系统(如MES、WMS等)的任务请求后,会计算出完成该任务所需的步骤和资源,如所需机器人数量、路径规划、时间安排等,再选择可用的移动机器人来执行任务。这通常涉及到移动机器人的状态(如是否空闲、电量、位置等)和执行能力(如承载能力、速度等)。一旦选择了工作用机,任务调度模块还会实时监控执行情况,以便及时发现问题,重新规划任务或分配给其他移动机器人来完成。
碰撞避免模块:碰撞避免模块是移动机器人调度系统中的“安保人员”,用于确保移动机器人在执行任务时能够安全、顺利、避免碰撞的完成任务。碰撞避免模块会依据地图构建模块中储存的地图,进行预先规划避开已知障碍,同时,在移动机器人运行过程中,模块还会通过传感器实时检测移动机器人与障碍物之间的距离和相对运动状态,若检测到潜在的碰撞风险,则会立即采取措施避免碰撞,如通过调整移动机器人的速度、方向或这行紧急停止等操作,保障移动机器人在复杂的环境中安全地执行任务。
物流仿真模块:物流仿真模块通过对移动机器人工作场景和流程进行系统建模,利用相应的应用程序模拟实际系统运行状况,并统计和分析模拟结果,可以在实际部署前进行优化设计和效果验证。例如评估移动机器人数量、布局方式、运行流程,模拟移动机器人分布和任务分配策略,以确定高效、低成本、低等待的运行方案;还能够辅助工程师验证移动机器人分配、碰撞避免、路径规划等算法的可行性和准确性,检测和纠正潜在问题,减少实际部署时的故障和风险;模拟不同负载和环境条件下移动机器人的执行情况,以评估系统的效果和性能;通过实际场景的模拟,验证不同算法和策略下移动机器人的执行情况,以确定合适的应用方案。
远程预警模块:通过监测传感器数据、环境数据等,远程预警模块能及时监测到潜在事故风险(如烟雾、火灾等),并及时向相关人员发送警报,以便及时采取措施。遇到移动机器人出现故障、电量不足或其他问题导致任务无法完成的情况时,远程预警模块也会发出警报,避免任务延误。同时,远程预警模块还会监测移动机器人传感数据的准确性和稳定性,遇到数据异常或偏差过大的情况,模块也会发出警报,提醒相关人员进行检修或校准。
移动机器人调度系统典型应用案例
随着移动机器人在工厂、车间、仓储物流等场景下的广泛应用,移动机器人调度系统已成为移动机器人核心的配套件之一。以下是移动机器人调度系统的一些典型的应用案例:
1、集群统一调度
为了提高效率、减少人力成本,某物流仓储中心部署了大量移动机器人,并引入了移动机器人调度系统。通过调度系统和移动机器人的共同作用,该物流仓储中心实现了自动化的货物运输,配送由人工改为由移动机器人运输,物流人员从5个减少到1个,配送次数由每天200余次上升至1000余次。在后续订单量快速增长的情况下,移动机器人调度系统通过仿真模块模拟新的运送方案,很快适应了变化的需求,实现了灵活的移动机器人调度。
2、运力动态调度
根据任务量的不同,调度系统会调整执行任务的移动机器人数量。在任务较少的时段,以不影响交期为前提,将任务集中分配到一组机器人上,以最小化完成所有任务;在任务增多的时段,依据现场情况和移动机器人状态,增加任务分配的移动机器人数量。这种动态调整可以帮助用户确保资源的最佳利用,在提高生产效率的同时降低运营成本。
3、复杂地形调度
某企业制造基地不仅地形动线复杂,还纵跨多个楼层,为移动机器人的运行提出了很高的要求。该企业将基地地图上传至调度系统中的地图构建模块,快速生成可用地图,通过碰撞避免模块,保障移动机器人安全、快速地到达目的地。为了帮助移动机器人乘坐电梯跨越楼层,移动机器人调度系统与电梯控制器、自动门等设备按照通信协议进行信号交互,实现了移动机器人自主上下楼。
移动机器人调度系统发展趋势
随着移动机器人面临的工作场景越来越复杂和多元化,任务调度频率和复杂程度快速上升,对调度系统提出了更为严苛的挑战,技术升级成为摆在移动机器人调度系统提供商面前的核心课题。 针对此,系统提供商们正从以下几个方面加速攻关,以提高复杂调度的能力。
1、多种移动机器人混合调度
为了满足生产需求,客户会对移动机器人进行综合考量,这往往会造成不同品牌不同类型的移动机器人要在同一场景下运作的情况,客户面临着需要使用多个调度系统的尴尬境地——不仅系统冗杂,还容易形成机器人孤岛。这些移动机器人在尺寸大小、运动模态、功能类型、控制力度等方面都存在差异,要求调度系统更加精准、细致的分类和算法控制;且由于品牌不同,移动机器人的接口、协议标准也各不相同,对调度系统在对接协议、调度协议、适配协议、交管协议及各接口上也提出了更开放、统一的要求。
2、加强设备互动性
数字化改造使企业厂房、车间变得越来越自动化,自动化产线、智能仓库,甚至电梯、自动门等都是移动机器人可能需要联通的设备,这对调度系统的连接能力和互动能力提出了更高要求。加强调度系统与设备的互动性,建立有效的数据互联,才能令移动机器人成为设备与设备之间连接的桥梁,有利于优化物流流程,提高整体效率和智能化水平,最终实现无人工厂的愿景。
3、加强系统可扩展性
在应用需求多样化的背景下,调度系统的可扩展性对其性价比有着重要影响。一个具有良好可扩展性的调度系统可以根据不同的业务需求灵活地扩展其功能和容量,而无需进行大规模的重构或替换,对于客户来说,能减少额外的时间、成本和资源的投入,还能满足期待的系统才是更加灵活、高效和经济的解决方案。
4、加快AI融合优化调度水平
对于移动机器人调度系统来说,大模型可以应用于多个模块之中,例如在路径规划中,通过学习大量的历史数据和实时环境信息,预测交通状况、预估任务完成时间等,从而生成最优的路径规划方案;结合强化学习算法,让移动机器人在实践中进行学习和优化,以达到自动调整调度策略的目的,逐步提高系统的整体性能和效率。
5、优化仿真验证能力
近年来,数字孪生作为实现各行各业智能化、数字化的重要工具之一,备受各界关注。通过数字孪生技术为调度系统的仿真模块加持,是许多调度系统软件厂商近期的重点。在部署与实施调度系统之前,可以根据数据与实际场景搭建一个数字孪生体,并对调度过程、移动机器人的运行进行模拟仿真,一方面可以提供系统运行的基本数据,从而可以让客户更清楚地了解系统运行时发生的问题,提前验证方案可行性,及时对系统进行调整;另一方面可以通过对数据的分析,进行更精准的预测,捕捉改进机会,使调度系统的优化更加行之有效,减少实际应用中的试错成本。此外,也可以根据数字孪生模型中的设备健康状况和预测性分析结果,提前对移动机器人进行维护和保养,提高可靠性和稳定性。
6、开放接口,完善协议标准
除了技术升级外,开放接口、制定完善的通信协议标准同样能够提升移动机器人调度系统的调度能力。2019年,移动机器人(AGV/AMR)产业联盟(Mobile Robot and AGV/AMR Industry Alliance,简称CMR产业联盟)标委会正式成立,并开展标准化相关工作,截止到2023年,CMR产业联盟共发布团体标准16项,包括《工业应用移动机器人数据通信接口规范》、《工业应用移动机器人与其调度系统数据接口规范》、《工业应用移动机器人无线通信设计规范》等,对推动行业的规范化、标准化发展产生了积极影响。未来,联盟还将在推动相关标准的制定的同时,做好标准宣贯工作。
移动机器人调度系统厂商巡礼
目前,市场上的移动机器人调度系统大部分是来自移动机器人厂商。一是因为其自研系统能够完美适配旗下移动机器人的运作,在成本、时间、架构、算法合理性之间达到最优;其二是能够通过自研系统展现厂商的软件实力,更能获得客户的青睐。不过,随着市场对移动机器人调度系统有了更高的要求,促使移动机器人厂商在调度系统上狠下功夫外,也催生出了一批专业的移动机器人调度厂商。(排名不分先后)
国际厂商
◉ 科尔摩根(KOLLMORGEN):科尔摩根成立于1962年,是著名的AGV车辆自动化系统套件供应商。旗下科尔摩根NDC解决方案包括导航、软件、硬件系统以及一系列支持服务。其中NDC8系统平台可对多种车型进行控制,满足各种移动机器人的调度需求。 ◉ 库卡(KUKA):库卡是国际知名的自动化集团公司,为各行各业提供机器人、生产设备和生产系统的定制化解决方案。库卡自主研发的库卡移动机器人专家管理系统K-MReS(KUKA Mobile Robot Expert System)基于多种复杂AI调度算法,帮助企业快速部署移动机器人车队,管理多台机器人同场协同运作。、 ◉ Mobile Industrial Robots(MiR):MiR成立于2013年5月,致力于开发并制造业界领先的AMR自主移动机器人,已形成了丰富的AMR自主移动机器人产品和解决方案组合。MiR Fleet集中车队控制软件可控制多达100台MiR机器人运行,并设有开放API,可以将机器人集成到ERP或WMS系统之中,高效管理MiR机器人车队,优化内部运输。
图2 MiR Fleet ◉ OTTO Motors: OTTO Motors是著名工业应用自主机器人技术领先企业Clearpath Robotics的子公司,主要负责研发生产制造面向工业的移动机器人。其自主研发的Fleet Manager(车队管理系统)可以完成机器人运行控制、作业监督与管理和设施集成之类的任务,并可通过HTTP Rest和WebSockets等协议与公司现有系统连接。2023年9月5日,罗克韦尔自动化宣布收购Clearpath Robotics(包括OTTO Motors)。
国内厂商
◉ 羲和软件:羲和软件源自于牧星智能,是一家专注从事移动机器人混合调度系统研发的软件企业。旗下iRMS智能机器人管理系统支持1000+并发调度能力,支持开放的全场景多品牌机器人混合调度,为客户提供100%高自主和高柔性、100%开放、高性价比、易学易用和易部署的机器人混合调度系统与解决方案。
◉ 威联加:苏州威联加信息科技有限公司是一家专注于生产制造执行管理软件和工厂内部物流咨询、规划和实施的高新技术企业。基于成熟的行业经验,威联加AGV智能调度系统(VConn)兼容多种导航方式,能够适配不同品牌的调度协议,兼容多品牌车型,方便快速对接生产现场的各类设备。VConn以JAVA平台为基础,在满足本地化部署的同时,也可直接部署到云端。
图4 Vconn调度界面
◉ 华睿科技:华睿科技成立于2016年,是一家专注于机器视觉、工业移动机器人产品及解决方案研发、生产和销售的高科技公司。华睿科技推出的AMR平台软件组合将RCS、ICS相结合,在实现智能调度、路径规划、交通管理、任务管理等功能的同事,无缝对接企业上层业务系统,并通过PC客户端、移动APP实现灵活配置执行任务。
◉ 快仓智能:上海快仓智能科技有限公司成立于2014年,致力于为客户提供移动机器人集群和智能操作系统为核心的解决方案。快仓智能的算法已经能解决多车协同、热度移位、推荐上架、订单组波、任务分配、路径规划等调度控制,实现最大化系统效率。
◉ 优艾智合(YOUIBOT):优艾智合成立于2017年,专注工业物流、智能巡检运维两大业务,为客户提供自主移动机器人及一体化解决方案。在调度系统方面,优艾智合推出了YOUIFleet,该软件通过处理业务系统下发的业务需求指令后,基于现场所有移动机器人的运行状态,将任务分配至移动机器人进行调度,同时进行路径优化及交通管制。
海柔创新:深圳市海柔创新科技有限公司专注于箱式仓储机器人系统研发设计,实现了机器人本体、底层定位算法、控制系统、机器人调度等核心元素的自主研发覆盖。HaiQ智慧仓储管理平台引入了“工作站”的概念,实现了“货到人”的拣选技术,并基于智能AI算法能够对多种设备进行实时调度和最优资源分配。支持多种系统对接方式,实现不同类型机器人及设备大规模同场作业。
◉ 迦智科技:迦智科技成立于2016年,专注于移动机器人制造领域,向制造业提供物流自动化、数字化与智能化产品及解决方案,业务场景覆盖半导体、FPD、电子、锂电池等行业。迦智科技的CLOUDIA(Cloud based Industrial Autonomy)机器人智能调度管理系统可以通过后台集中监控,能够实现多机器人的任务指派、调度协同与交通管制,提供接口与WMS、MES、ERP系统无缝对接。
◉ 昆船智能:昆船智能是国内最早进入移动机器人领域的企业之一,自2000年就开始专注于物流移动机器人调度系统技术平台(ATIS)的自主研发。ATIS 4.0系统可以适应复杂的业务流程及运行路径,支持不同导引方式的移动机器人协同作业,目前,已有ATIS Mini、ATIS Pro、ATIS Giga三大版本帮助客户应对不同场景需求。
◉ 海康机器人:海康机器人是面向全球的机器视觉和移动机器人产品及解决方案提供商。RCS-2000厂内物流调度系统支持一站式地图编辑、3D可视化业务实时展示;支持多种车型统一调度,实现了多机器人任务最优分配,路径规划及道路交通管制,让机器人协同工作又不相互影响,使效能最大化;支持基于场景抽象业务块,能够通过业务块之间的逻辑连接,灵活编排业务场景,同时支持二次开发。满足业务快速上线,场景灵活覆盖。
◉ 旷视科技:旷视科技是一家聚焦物联网场景的人工智能公司,旗下机器人仓储物流软件平台河图是基于AI算法,面向供应链物联网打造的机器人物联网操作系统。该系统作为一个开放式的机器人调度平台,具备生态连接、协同智能、数字孪生等应用优势。
◉ 极智嘉:极智嘉成立于2015年,以智能物流为切入点,利用大数据、云计算和人工智能技术,专注打造极具智能的机器人产品。极智嘉拥有大规模复杂调度能力的机器人集群管理系统平台RMS已经迭代到了第五代,在路径规划、调度规模、协议扩展等方面进行了优化和提升,使机器人调度变得更加灵活,为客户快速实现智慧物流变革赋能。
◉ 仙工智能:仙工智能是一站式智能制造及智慧物流解决方案提供商,为企业提供“控制器+移动机器人+数字化软件”产品组合。仙工智能的RDS机器人及自动化设备统一资源调度系统针对部署移动机器人系统的难点、痛点,通过低代码业务流程引擎,为客户快速搭建应用场景提供高效方案,帮助客户实现多机种协作、多区域运行、多设备交互等;提供业务及调度全景仿真,并可直接应用于真实业务。
◉ 宾通智能:上海宾通智能科技有限公司是一家以智能算法为核心,提供柔性制造与智慧物流系统解决方案的高科技公司。宾通智能BFMS智能多机调度系统是多台移动物流设备智能调度中央管理系统,采用中央管理、独立控制调度多车的管理模式,管理多类型导航模式、不同类型的多台车辆的协作,并与APS、MES、WMS、ERP及其他辅助系统无缝对接,构建信息闭环,打造柔性化的智慧物流平台。
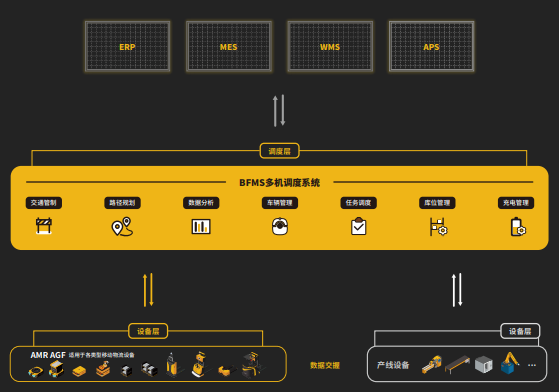
图5 宾通智能调度系统示例
◉ 格局技术:深圳市格局技术有限公司于2016年成立,专注于移动机器人行业,为机器人行业集成商、设备商和终端客户提供专业性的WCS系统软件解决方案、核心零部件AGV主控制器和定制化服务。格局技术自主研发的GH-System调度系统软件,可轻松应对多场景移动机器人运行,支持不同导航方式的移动机器人控制,满足客户定制化的需求。
◉ 凯钒科技:凯钒科技深耕AGV控制和仓库管理,致力于帮助客户提高工业场景智能化程度。旗下AGV调度系统能够管理任意数量、种类AGV或其他设备,并能够自主完成路径规划,在满足企业调度需求的同时,打通上下游系统的信息壁垒,避免数据孤岛,形成统一有机体。
◉ 安歌科技:安歌科技成立于2008年,为客户提供涵盖“设备+软件+系统+平台服务”的全链路工业智能物流解决方案。ADS 1.1调度系统是一款由安歌科技Enotek自主研发的AGV调度系统,同时支持云端部署和本地部署的多车体调度和任务管理,可实时处理大规模移动机器人集群的路径规划、任务分配、设备状态监控、多机型协同调度等任务。
◉ 中极智能:专注为客户提供企业内部物流工业车辆的无人驾驶控制器、物流机器人、多智能体调度系统及物流自动化整体解决方案。中极智能自主研发、设计的AGV调度系统软件,拥有友好的人机交互界面,专注为用户提供稳定的AGV运行平台、强大的数据实时交互及运算能力、动态任务分配、智能交通管理,实现AGV运行方式的多样性。
◉ 斯坦德机器人:斯坦德机器人所运用的FMS(Fleet Management System)机器人调度管理系统,是通过运行于服务器上的软件,作为移动机器人解决方案中的重要组成部分。FMS系统主要处理业务相关系统下发的业务需求,调度移动机器人及相关外界设备执行任务,完成任务执行中的各种状态管理及交通管理,实现机器人与各层级系统间的联动与应用场景的数据化、可视化管理。
总结
随着移动机器人行业的迅速发展,市场的专业化和细分度将会越来越高,对调度系统的灵活性、扩展性、运行效率等提出了更高的要求。在移动机器人调度系统技术创新和升级的趋势下,未来,移动机器人调度系统将覆盖更多的应用场景,与移动机器人共同赋能数字化转型升级。
审核编辑:黄飞
-
轮式移动机器人电机驱动系统的研究与开发2025-06-11 395
-
基于Matlab和VR技术的移动机器人建模及仿真2023-09-20 808
-
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现2023-06-28 2168
-
详解移动机器人软硬件系统问题2021-11-11 2574
-
移动机器人的三种主要运动系统2021-09-01 2241
-
什么是移动机器人软硬件系统问题2021-08-06 2519
-
请问怎么设计一种室外移动机器人组合导航定位系统?2021-04-19 2990
-
如何实现移动机器人的设计?2020-11-23 3315
-
家庭移动机器人避障常用传感器及相关技术2020-05-14 3807
-
探访智能工厂移动机器人“专家”仙知机器人2019-05-08 4599
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4136
-
Labview My RIO 移动机器人2016-08-21 13635
-
资料:移动机器人能否自动充电?2016-01-20 5181
-
移动机器人常用传感器2012-08-20 6934
全部0条评论

快来发表一下你的评论吧 !
