

基于C8051F040单片机的温度测控系统
控制/MCU
描述
温度遥控遥测是远程实现对温度的测量与控制,特别适合那些环境恶劣,测量人员不容易接近的场合,近年来在工农业生产中应用广泛。根据遥控遥测系统的特点,提出了对水温遥控遥测的设计方案。
1 总体方案设计
温度遥控遥测系统主要由微处理器系统、测温模块、加热模块、通信模块、液位模块以及上位机软件等组成。系统构成如图1所示。
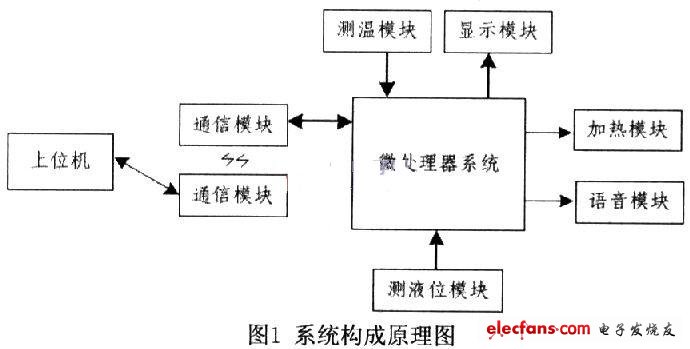
测温模块测量液体温度后,把温度数值发送给微处理器,当温度变化达到一定值后,加热模块开始加热,首先可以在设定的时间内,加热到设定的温度并稳定在该温度一段时间。系统还可以按照设计好的各温度节点进行分段折线加热,精度很高。测液位模块实时测量液体液位,并传给微处理器。系统通过两个通信模块实现遥测遥控,上位机设好温度参数后,通过通信模块传给远处的微处理器,微处理器按照上位机设定好的温度控制加热模块进行加热,同时微处理器把液体温度和液位高度通过通信模块传给上位机软件,通过上位机软件界面可以实时显示和监测液体温度和高度。显示模块把系统的温度、高度等各项数据实时显示在液晶屏幕上。
程序采用PID算法,建立比例、积分、微分数学模型,控制TCA785移相触发器正负触发可控硅BAT-20对受热物质加热。移相触发双向可控硅调压精准,无级调压,较好地融合了超调和加热时间之间的矛盾;遥感遥测使用PTR-2000与上位机通信,在0到100℃范围内可任意设定、控制水温。PTR- 2000通信距离远,准确率高,PC机界面实时显示温度曲线,温度、液位上下限设定。并具有温度曲线采样率设定、温度曲线打印功能。
2 硬件设计
系统硬件主要由C8051F040单片机最小系统、PTR2000无线通信模块、TCA785移相调压控制模块、Ptl00测温模块、WDK505测液位模块等组成。
2.1 C8051F040单片机最小系统
最小系统以单片机C8051F04O为核心,包括晶体振荡电路、复位电路、抗干扰电路、电压基准电路和电源部分。C805lF040单片机是美国 Cygnal公司生产的完全集成的混合信号系统级芯SoC。它具有64kB Flash、4352BRAM、CAN控制器2.0、两个串行接口、5个16位定时器、12位A/D转换器、8位A/D转换器及12位D/A转换器等,它内部还带有JTAG接口,使调试变得非常方便。
2.2 PTR2000无线通信模块
该器件将接收和发射合接为一体,工作频率为国际通用的数传频段433MHz;采用FSK调制/解调,可直接进入数据输入/输出,抗干扰能力强。该模板块在内部集成了高频接收、PLL合成、FSK调制/解调、参量放大、功率放大、频道切换等功能。通信距离可以满足设计要求,设计电路中将PTR2000的一部分通过MAX232进行电平转换后与计算机串口连接,另一部分与最小系统连接。
2. 3 TCA 785移相调压控制模块
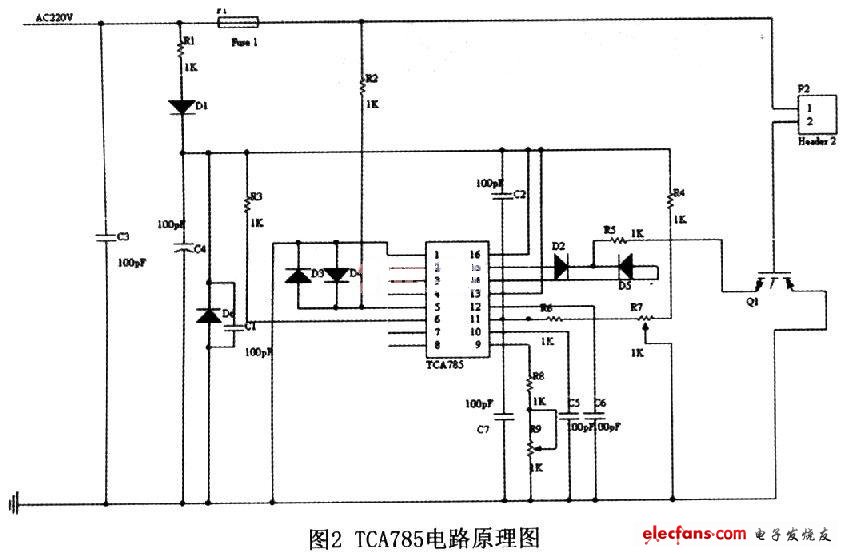
加热模块采用移相触发集成触发器来实现。触发器TCA785过零点的识别能力高,移相范围更宽,输出脉冲的整齐度更好,可使受控元件在0V到220V无级改变,常用于对精度要求高,受控环境恶劣的条件下。移相触发是通过改变电压调节导通角来实现调压,负载两端的电压及平均功率是随移相触发角的变化而变化的。在可控硅的每个正或负的周期中都有保持通、断的部分,即输出连续可调,能适应各种性质的负载。本系统为加热单元设置了总控开关,上位机可直接控制开关的通断,用灯泡显示开关状态。其控制原理图见图2。
2.4 Ptl00测温模块
Ptl00温度传感器为正温度系数热敏电阻传感器,具有抗振动、稳定性好、准确度高、耐高压等优点。铂热电阻的线性较好,在0到100℃之间变化时,最大非线性偏差小于0.5℃。铂热电阻阻值与温度关系为:

式中,A=0.00390802;B=-0.000000580;其阻值表达式可近似简化为:Rpt00=100×(1+At),当温度变化 1℃,Ptl00阻值近似变化0.39 Ω。
2.5 WDK505测液位模块
采用WDK505压力变送器测量液位。该仪器具有防结露、防雷击设计,抗干扰能力强,长期稳定性好等优点。芯片置于全不锈钢壳体内坚固密封,可靠性好,精度高。
3 软件设计
此系统的主要任务是对C8051F040芯片的初始化和各种参数的设置和通信,并显示。重点是超调量控制、温度控制PID实现以及上位机软件的编写。
3.1 超调量控制
实验表明,水温控制系统中,采用一般的控制始终具有较大的超调,只能靠自然冷却,这就使得调节时间大大延长。因此,在水温控制系统中要缩短调节时间,就必须做到基本无超调。通过反复实验,采用在程序中加入PID算法以及模糊控制方法进行温度控制。实践证明,这种控制方式可以加快系统阶跃响应,减小超调量,并且具有较高的温度控制精度。
3.2 上位机软件
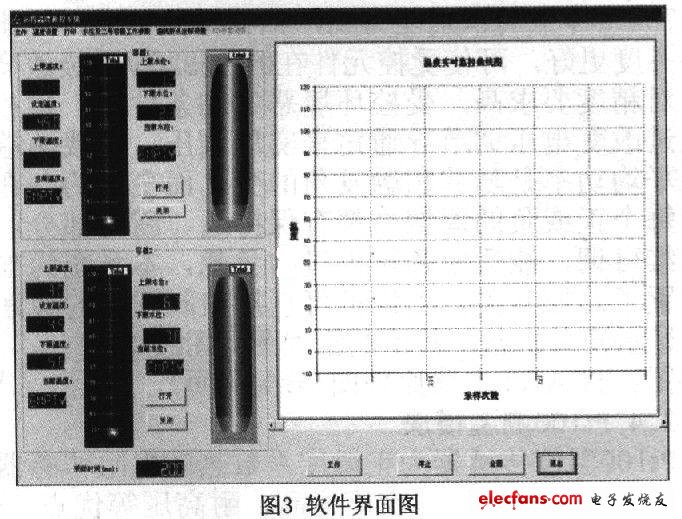
上位机软件利用VC++编写,可以设置2个通道的上、下限温度和液位,以及温度和液位的实时显示和温度随时间变化曲线。上位机软件可以打印温度曲线,可以全图打印,也可以局部打印,还可以随时查看历史数据。其界面如图3所示。
3.3 温度控制PID实现
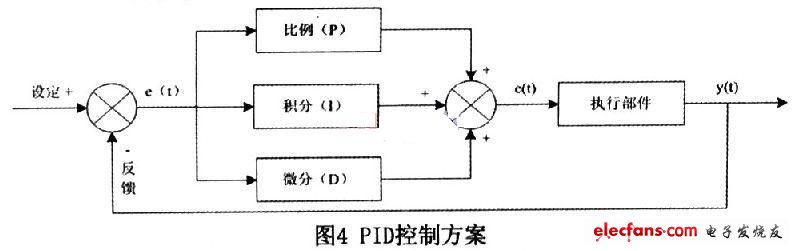
PID控制是控制工程中技术成熟、应用广泛的一种控制策略,经过长期的工程实践,已形成了一套完整的控制方法和典型的结构。PID的工作基理是:由于来自外界的各种扰动不断产生,要想达到现场控制对象值保持恒定的目的,控制作用就必须不断地进行。若扰动出现使得现场控制对象值发生变化,现场检测元件就会将这种变化采集后经变送器送至PID控制器的输入端,并与其给定值进行比较得到偏差值,调节器按此偏差并以我们预先设定的整定参数控制规律发出控制信号,去改变调节器的开度,使之增加或减少,从而使现场控制对象值发生改变,并趋向于给定值,从而达到控制目的。其实PID的实质就是对偏差进行比例、积分、微分运算,根据运算结果控制执行部件的过程。控制方案如图4所示。
PID控制器的控制规律可以描述为:

本设计利用了上面所介绍的位置式PID算法,将温度传感器采样输入作为当前输入,然后与设定值进行相减得偏差,再对偏差值进行PID运算产生输出结果,最后控制定时器的时间进而控制加热器。
4 结束语
温度遥控遥测是工业上使用比较多的一种控制技术,本文就是针对温度遥控遥测所进行的探讨与实践。设计采用PID控制算法大大减少超调量,提高控制精度。由于传感器和其它器件本身并非理想线性,程序中对实测数据进行了线性补偿。经过大量的实验,观测数据,优化系统,最终得到的实验结果精度较高。水温控制准确,双向通信良好,上位机界面完整、优美。希望本文提出的方案能对大家在温度遥控遥测的设计与应用方面有所帮助和启示。
-
基于UC3875和C8051F040单片机设计开发的智能充电器2023-11-06 848
-
基于C8051F040单片机的便携式心电监护仪的低功耗设计2021-06-24 1271
-
JTAG往c8051f040下程序失败2019-10-28 1464
-
基于C8051F040单片机的CAN总线通信2017-11-24 2184
-
如何将C8051F040单片机扩展出第三对串口(TX RX)?2016-01-20 3484
-
基于C8051F040单片机的CAN总线测试模式研究2013-03-06 1241
-
c8051f040模式1全双工通信2012-12-29 2628
-
c8051f0402011-04-26 5214
-
C8051F040单片机在CAN通信网络中的应用2010-06-28 849
-
基于C8051F040的特种车辆电源监控系统设计2009-11-03 1273
-
基于C8051f040的CAN总线智能节点设计2009-06-17 983
-
c8051f040/c8051f041/c8051f042/2008-07-20 1304
-
C8051F040/C8051F041/C8051F042中2008-07-19 2529
-
C8051F040在基于CAN总线的分布式测控系统中的应用2006-03-11 2364
全部0条评论

快来发表一下你的评论吧 !
