

在C++中使用OpenVINO工具包部署YOLOv5-Seg模型
描述
来源:小白学视觉
YOLOv5兼具速度和精度,工程化做的特别好,Git clone到本地即可在自己的数据集上实现目标检测任务的训练和推理,在产业界中应用广泛。开源社区对YOLOv5支持实例分割的呼声高涨,YOLOv5在v7.0中正式官宣支持实例分割。
本文主要介绍在C++中使用OpenVINO工具包部署YOLOv5-Seg模型,主要步骤有:
配置OpenVINO C++开发环境
下载并转换YOLOv5-Seg预训练模型
使用OpenVINO Runtime C++ API编写推理程序
下面,本文将依次详述
1.1 配置OpenVINO C++开发环境
配置OpenVINO C++开发环境的详细步骤,请参考《在Windows中基于Visual Studio配置OpenVINO C++开发环境》。
1.2 下载并转换YOLOv5预训练模型
下载并转换YOLOv5-seg预训练模型的详细步骤,请参考:https://mp.weixin.qq.com/s/K3wP5YLAU4p5jsdiMYjuMg,本文所使用的OpenVINO是2022.3 LTS版。
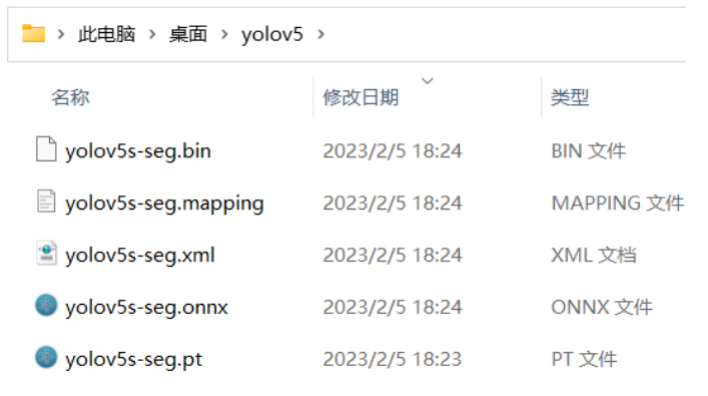
首先,运行命令获得 yolov5s-seg ONNX 格式模型:yolov5s-seg.onnx:
python export.py --weights yolov5s-seg.pt --include onnx
然后运行命令获得yolov5s-seg IR格式模型:yolov5s-seg.xml和yolov5s-seg.bin,如下图所示
mo -m yolov5s-seg.onnx --compress_to_fp16
1.3 使用OpenVINO Runtime C++ API编写推理程序
一个端到端的AI推理程序,主要包含五个典型的处理流程:
采集图像&图像解码
图像数据预处理
AI推理计算
对推理结果进行后处理
将处理后的结果集成到业务流程

图 1-2 端到端的AI推理程序处理流程
1.3.1 采集图像&图像解码
OpenCV提供imread()函数将图像文件载入内存,
Mat cv::imread (const String &filename, int flags=IMREAD_COLOR)
若是从视频流(例如,视频文件、网络摄像头、3D摄像头(Realsense)等)中,一帧一帧读取图像数据到内存,则使用cv::VideoCapture类,对应范例代码请参考OpenCV官方范例代码:https://github.com/opencv/opencv/tree/4.x/samples/cpp。
图 1-3 从视频流读取图像帧范例
1.3.2 YOLOv5-Seg模型的图像预处理
YOLOv5-Seg模型构架是在YOLOv5模型构架基础上,增加了一个叫“Proto”的小型卷积神经网络,用于输出检测对象掩码(Mask),如下图所示:
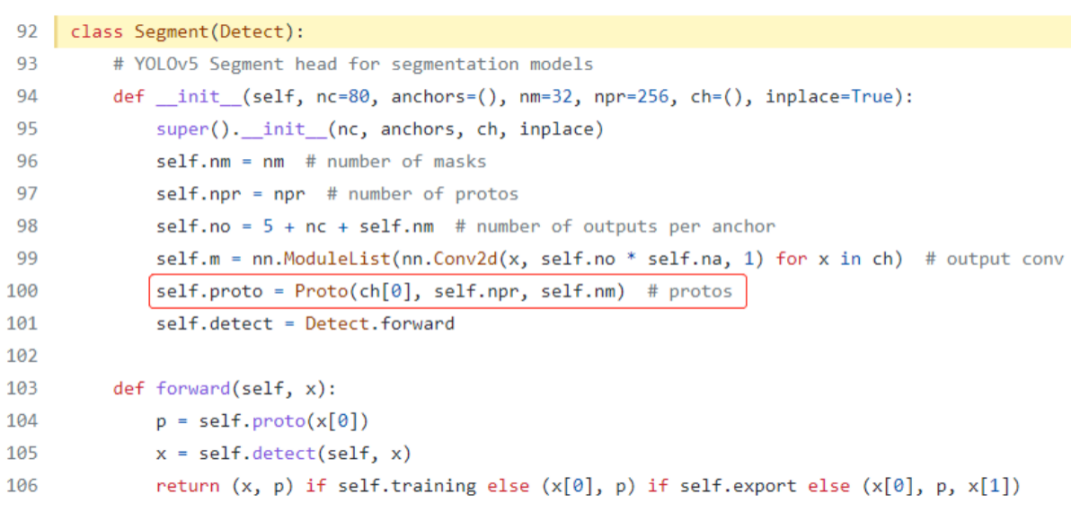
图 1-4 YOLOv5-Seg模型输出的代码定义
详细参看:https://github.com/ultralytics/yolov5/blob/master/models/yolo.py#L92
由此可知,YOLOv5-Seg模型对数据预处理的要求跟YOLOv5模型一模一样,YOLOv5-Seg模型的预处理代码可以复用YOLOv5模型的C++预处理代码。
另外,从代码可以看出YOLOv5-Seg模型的输出有两个张量,一个张量输出检测结果,一个张量输出proto,其形状可以用Netron打开yolov5-seg.onnx查知,如下图所示。
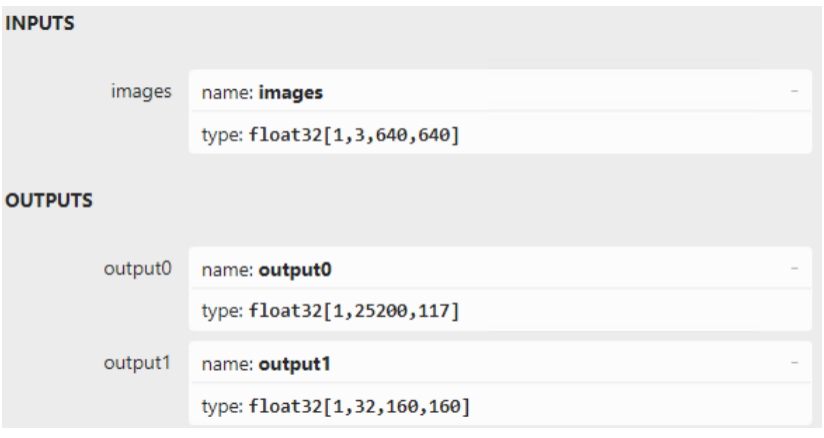
图 1-5 YOLOv5-Seg模型的输入和输出
“output0”是检测输出,第一个维度表示batch size,第二个维度表示25200条输出,第三个维度表示有117个字段,其中前85个字段(0~84)表示:cx、cy、w、h、confidence和80个类别分数,后32个字段与”output1”做矩阵乘法,可以获得尺寸为160x160的检测目标的掩码(mask)。
1.3.3 执行AI推理计算
基于OpenVINO Runtime C++ API实现AI推理计算主要有两种方式:一种是同步推理方式,一种是异步推理方式,本文主要介绍同步推理方式。
主要步骤有:
初始化Core类:ov::Core core;
编译模型:core.compile_model()
创建推理请求infer_request:compiled_model.create_infer_request()
读取图像数据并做预处理:letterbox()
将预处理后的blob数据传入模型输入节点:infer_request.set_input_tensor()
调用infer()方法执行推理计算:infer_request.infer()
获得推理结果:infer_request.get_output_tensor()
基于OpenVINO Runtime C++API的同步推理代码如下所示:
// -------- Step 1. Initialize OpenVINO Runtime Core --------
ov::Core core;
// -------- Step 2. Compile the Model --------
auto compiled_model = core.compile_model(model_file, "GPU.1"); //GPU.1 is dGPU A770
// -------- Step 3. Create an Inference Request --------
ov::InferRequest infer_request = compiled_model.create_infer_request();
// -------- Step 4. Read a picture file and do the preprocess --------
cv::Mat img = cv::imread(image_file); //Load a picture into memory
std::vector paddings(3); //scale, half_h, half_w
cv::Mat resized_img = letterbox(img, paddings); //resize to (640,640) by letterbox
// BGR->RGB, u8(0-255)->f32(0.0-1.0), HWC->NCHW
cv::Mat blob = cv::blobFromImage(resized_img, 1 / 255.0, cv::Size(640, 640), cv::Scalar(0, 0, 0), true);
// -------- Step 5. Feed the blob into the input node of YOLOv5 -------
// Get input port for model with one input
auto input_port = compiled_model.input();
// Create tensor from external memory
ov::Tensor input_tensor(input_port.get_element_type(), input_port.get_shape(), blob.ptr(0));
// Set input tensor for model with one input
infer_request.set_input_tensor(input_tensor);
// -------- Step 6. Start inference --------
infer_request.infer();
// -------- Step 7. Get the inference result --------
auto detect = infer_request.get_output_tensor(0);
auto detect_shape = detect.get_shape();
std::cout << "The shape of Detection tensor:"<< detect_shape << std::endl;
auto proto = infer_request.get_output_tensor(1);
auto proto_shape = proto.get_shape();
std::cout << "The shape of Proto tensor:" << proto_shape << std::endl;
1.3.4 推理结果进行后处理
后处理工作主要是从”detect ”输出张量中拆解出检测框的位置和类别信息,并用cv::NMSBoxes()过滤掉多于的检测框;从”detect ”输出张量的后32个字段与”proto”输出张量做矩阵乘法,获得每个检测目标的形状为160x160的掩码输出,最后将160x160的掩码映射回原始图像完成所有后处理工作。
1.4 总结
配置OpenVINO C++开发环境后,可以直接编译运行yolov5seg_openvino_dGPU.cpp,结果如下图所示。使用OpenVINO Runtime C++ API函数开发YOLOv5推理程序,简单方便,并可以任意部署在英特尔CPU、集成显卡和独立显卡上。
-
OpenVINO™工具套件插件对YOLOv5s模型和scatterUpate层的支持范围是什么?2025-03-05 270
-
用OpenVINO C# API在intel平台部署YOLOv10目标检测模型2024-06-21 2996
-
NNCF压缩与量化YOLOv8模型与OpenVINO部署测试2023-11-20 2886
-
如何使用OpenVINO C++ API部署FastSAM模型2023-11-17 2073
-
基于OpenVINO C++ API部署RT-DETR模型2023-11-03 2542
-
【YOLOv5】LabVIEW+TensorRT的yolov5部署实战(含源码)2023-08-21 2396
-
如何在OpenVINO工具包中使用带推理引擎的blob?2023-08-15 645
-
三种主流模型部署框架YOLOv8推理演示2023-08-06 4213
-
用OpenVINO™ C++ API编写YOLOv8-Seg实例分割模型推理程序2023-06-25 3426
-
在AI爱克斯开发板上用OpenVINO™加速YOLOv8-seg实例分割模型2023-06-05 2234
-
在AI爱克斯开发板上用OpenVINO™加速YOLOv8目标检测模型2023-05-12 2846
-
在C++中使用OpenVINO工具包部署YOLOv5模型2023-02-15 12514
-
使用 OpenVINO™ 工具包监控机器操作员2023-01-03 1584
全部0条评论

快来发表一下你的评论吧 !
