

CAN总线的发展历程 CAN XL总线的典型应用
描述
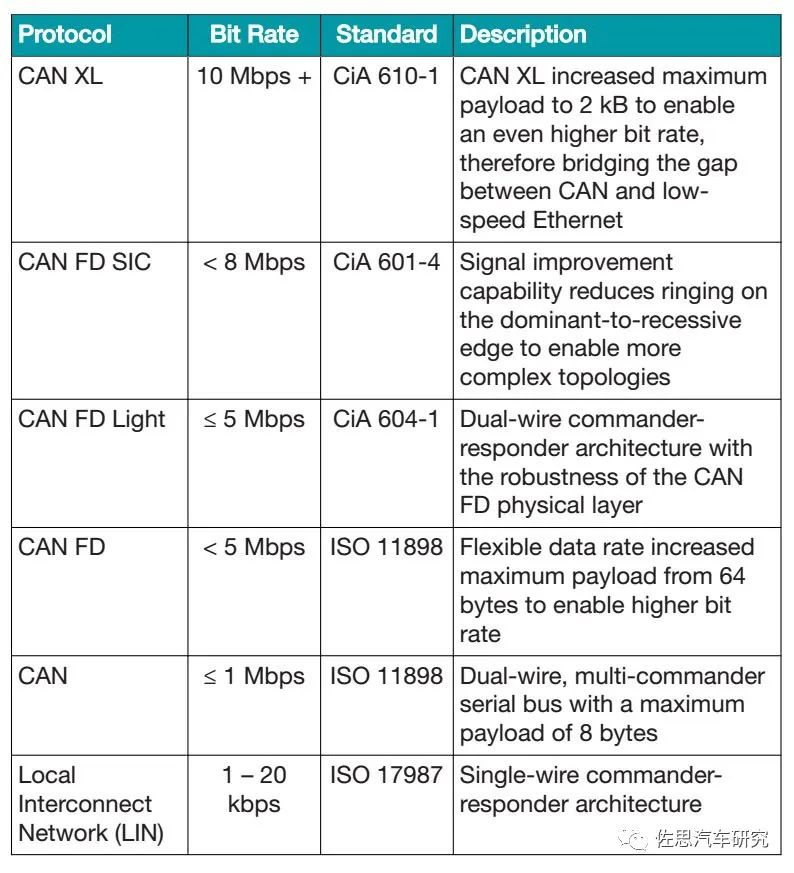
CAN总线通讯协议由德国博世于上世纪80年代发明,第一个使用CAN总线通讯协议的量产车型是1991年的奔驰S级轿车,至今CAN总线依旧是车内主要的通讯总线。随着汽车电子智能化加速,CAN总线也开始进一步升级,2003年CAN总线升级为HS CAN,但还是第一代技术。2011年第二代CAN总线CAN-FD开始研发,2015年CAN FD标准即ISO11898发布,2019年,CAN FD SIC(SignalImprovement Capability)信号增强版标准CiA(CAN in Automation)601-4发布,2021年CAN FD的轻量级版本CAN FD Light 标准CiA 604-1发布,2021年12月,第三代CAN总线即CAN XL标准CiA 610-1发布,目前CAN XL的标准还未完全完成。这些新标准最终将转换为ISO11898-2标准。
CAN总线发展历程
来源:德州仪器
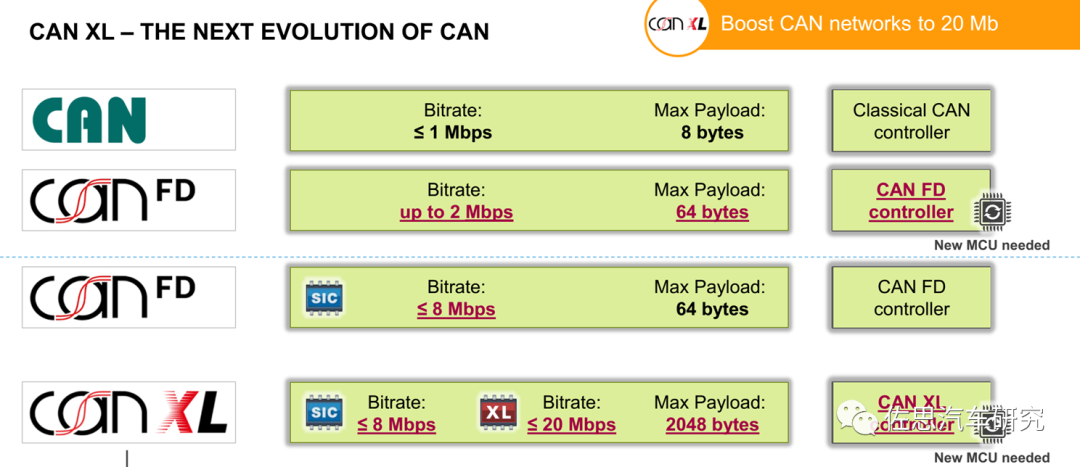
图片来源:NXP
重大升级需要新的MCU对应,CAN总线的升级领域主要是Payload,从最初的8bytes升级到2048bytes,传输效率大大提升,以太网每帧最大是1518bytes,CAN XL已经超过了以太网。
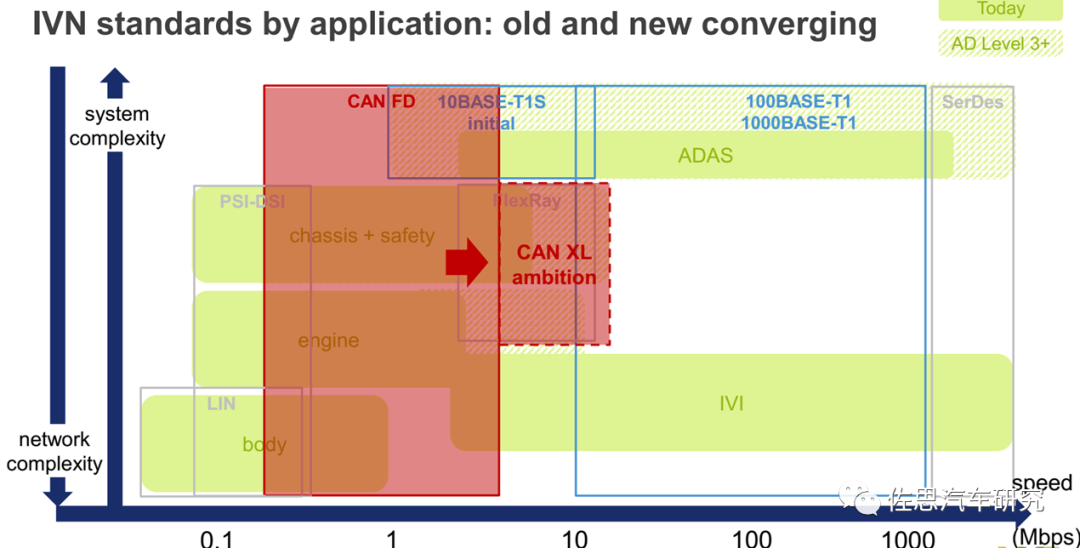
图片来源:NXP
目前,车身领域主要是LIN总线,气囊安全领域是PSI总线,底盘、引擎、电控、电池领域主要是CAN总线,欧洲三大豪华车和沃尔沃底盘领域是FlexRay总线。CAN XL第一个取代的就是FlexRay总线,前向毫米波雷达领域主要是CAN-FD总线,域控制器领域主要是以太网,摄像头与显示领域主要是解串行与加串行SerDes。
驱动车内总线发展的根源是三大任务:一是自动驾驶,二是软件定义汽车的服务导向架构,三是电动化。服务导向架构(SOA)主要作用包括大幅降低软件开发成本,缩短软件开发周期,从按月计算变为按小时计算;其次是提高OTA效率,缩短OTA时间;最后是V2X或云计算。
目前比较先进的车辆已经处于交叉域控制器时代,如蔚来的ES8,智己的LS7,宝马的iX。特斯拉的左中右三个区域控制器表明它还是Body Zonal时代。未来将进化到SDV软件定义汽车时代。
CAN FD的主要缺点是振铃现象,信号振铃现象在CAN通讯中是普遍存在的,尤其在星型拓扑结构中当总线电平由显性状态切换到隐性状态时更容易产生。更高的通讯速率意味着更窄的位宽时间,当前CAN FD的2Mbps相较以前HS-CAN的500kbps位宽时间由2000ns缩短为500ns。同样强度的振铃干扰,在更高的通讯速率下,由于得不到足够的时间衰减到隐性差分电压判定阈值以下,从而更容易导致通讯错误。
为减少振铃效应,目前主流的做法是缩小CAN网络规模,减少节点数,缩短支线长度,尽量使用线性拓扑结构(linear topology)等。这些措施确实能有效减小振铃强度,但也带来了一些缺点:
增加了CAN总线数量,例如将一条10个节点的总线拆分成两条5个节点的总线;
增加了网关(gateway)的需求,以应对更多不同总线之间的信息交互;
缩短支线长度,变更拓扑结构等措施,与整车模块布局相冲突。
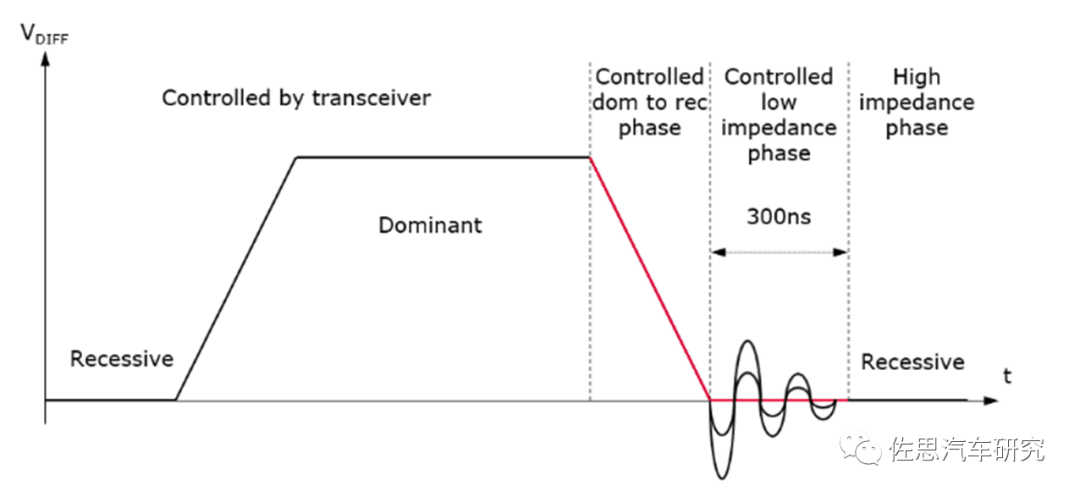
图片来源:英飞凌
SIC信号增强技术是当总线需要从显性状态切换到隐性状态时,收发器首先会控制总线电平的切换斜率,这一功能在改善EMC表现的同时也适当降低了振铃强度。在此之后的300ns内收发器将总线控制在低阻抗状态,从而彻底吸收振铃能量。
使用SIC后,通讯速率可以提高至8Mbps,目前支持 CAN FDSIC的主要有英飞凌的TLE9371,NXP的TJA1463/1463,德州仪器的TCAN1463。
CAN FD Light仅对从命令节点接收到的CAN FD数据帧起作用,这避免了昂贵的附加电路,响应节点不进行仲裁。通信方案是命令/响应行为,一个命令节点控制连接的响应节点的通信,传输的帧符合ISO 11898-1:2015中规定的CAN FD数据帧,这意味着最大有效载荷(数据段)可以达到64字节。支持ISO 11898-1:2015中指定的复杂错误检测功能,但不传输错误和远程帧。因此,数据帧的调度应该是周期性的。这也意味着无法保证网络范围内的数据一致性。如果需要,这应该在应用程序中解决。
CAN FD Light适用于低成本应用,例如道路车辆的智能前照灯(smartheadlight)。连接的LED集群可以从一个命令节点单独控制。其他潜在应用包括:供暖(heating),通风(ventilation),air-conditioning空调(HVAC)等系统。CAN FDLight规范不支持比特率切换。因此,最大比特率为1 Mbit/s,但仍比传统串行通信链路(例如EIA 232)和网络(例如LIN)更快。
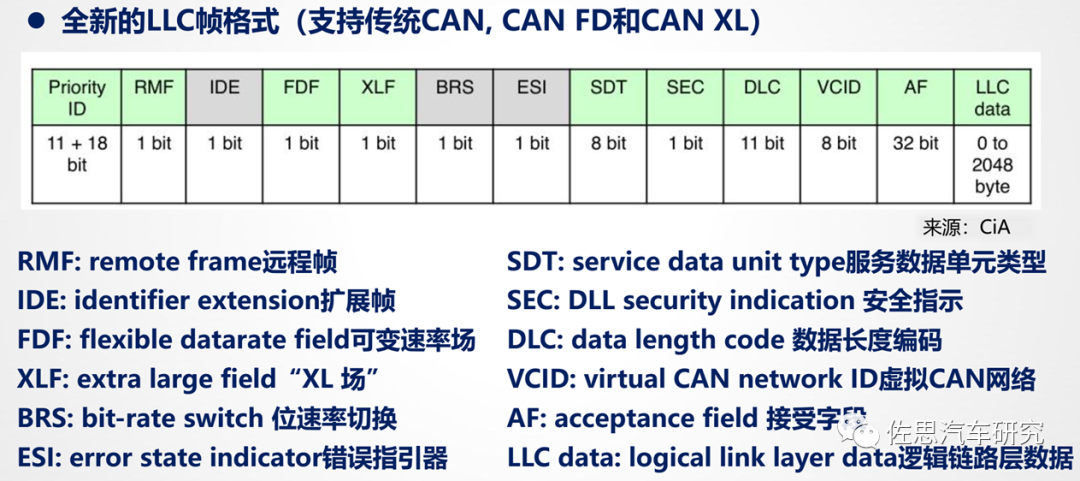
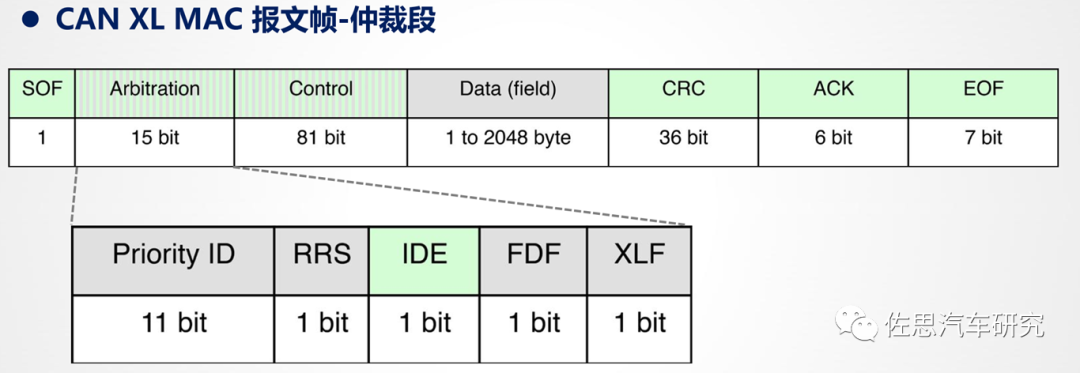
CAN XL帧结构总体与CAN FD一致,帧的头尾是低速模式(约1MBit/s),帧主体是高速模式,高速模式和低速模式通过特定字段划分。帧格式的简要说明如下:
Priority ID、AF(Acceptance Field):与CAN ID相比,CAN XL把优先级和message ID的概念做了拆分,Priority ID用于处理优先级,AF用于表示message ID,后文做额外说明;
XL:这个字段包含多个bit,表示此报文是标准CAN报文、CAN FD报文还是CAN XL报文(即兼容CAN、CAN FD);
ADS(Arbitration Data Sequence)、DAS(Data Arbitration Sequence):速率转换的过渡字段,用于低速率转高速率、高速率转低速率;
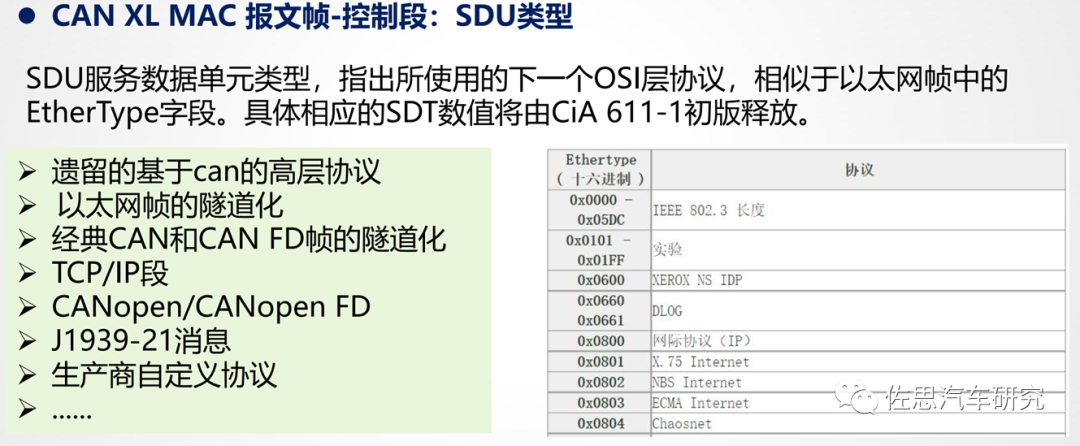
SDT(SDU Type):指示数据类型,后文做额外说明;
SEC:表示是否为加密数据,由于目前的资料有限,可能需要等CAN XL正式发布后再讨论其作用与否;
SBC(Stuff Bit Count)、PCRC、FCRC、FCP(Format Check Pattern):用于CRC校验、错误检测,由于可携带数据长度增加了很多,因此设计了前后2处的CRC检验,CRC的长度也相应扩展;
VCID(Virtual CAN Network ID):类似以太网中的VLAN。
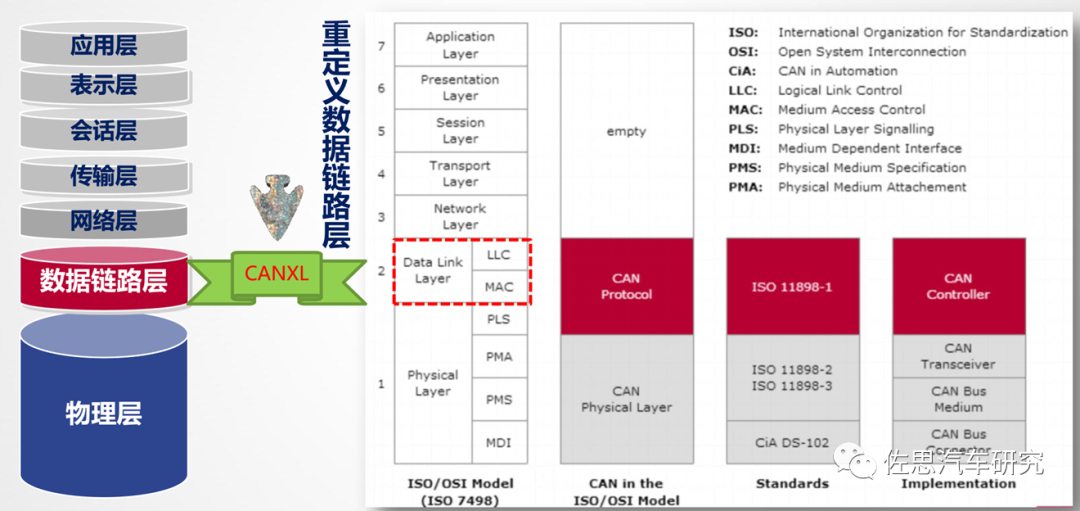
2020年的第17届国际CAN大会(iCC)上,CiA推出了第三代CAN通信技术CAN-XL(extra long)。CAN XL重新定义两个数据链路层即LLC和MAC。
全新LLC帧格式
图片来源:虹科电子
图片来源:虹科电子
在经典的CAN和CAN FD中,CAN ID段用于仲裁和寻址目的,不过在CAN XL协议中仲裁和寻址功能是分开的。
图片来源:虹科电子
CAN XL一方面是从CAN FD衍生,继承了CAN FD的特性(如仲裁机制、错误检测等等),能很好地衔接以CAN为主的车内通信(主要是指基于信号的通信方式);另一方面,CAN XL对其协议做了很大的扩展,允许在CAN XL上运行TCP/IP,CAN XL期望做到对以太网上层协议的良好兼容(特别是面向服务的通信方式)。
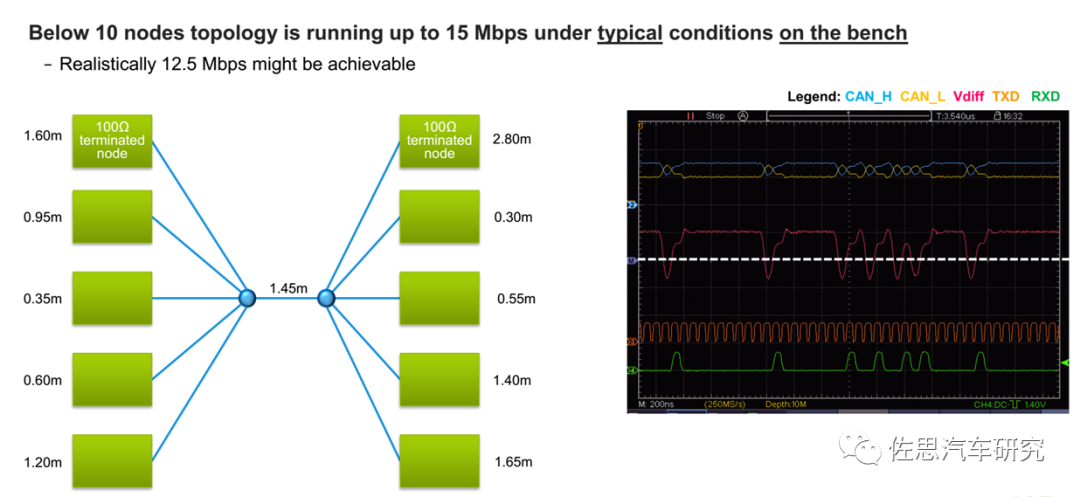
低于10个节点拓扑的速率可达15Mbps。
CANXL典型应用
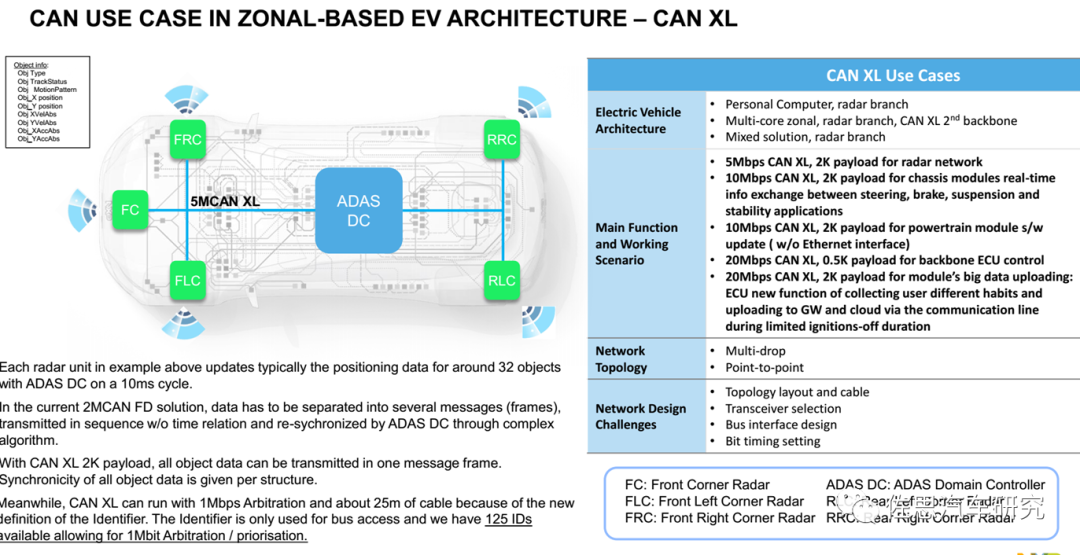
图片来源:NXP
高性能毫米波雷达是CAN XL最佳应用场合,随着4D毫米波雷达的大量出现以及角雷达都转换为77GHz中距离雷达,毫米波雷达可以提供更多信息,早期的毫米波雷达只能提供目标速度、距离和方位角信息,且一般最多监测8-16个目标,Mobileye设计的毫米波雷达通道数高达2000以上(特斯拉的4D毫米波雷达仅为48通道),华为的4D毫米波雷达是288通道。如此高的通道基本上就是近似16线激光雷达,可以提供目标类型、轨迹状态、Motion Pattern、坐标方位、Velabs、Accabs,最高可监测128-256个目标。
除了毫米波雷达,其他包括汽车标定与诊断、E-CALL紧急呼叫也是CAN XL的目标应用领域。
功耗方面,CAN XL对比以太网优势明显,当前的车载以太网对于休眠唤醒的深度支持大多需要I/O或者CAN端口作为控制来实现,这对于车内网络来说显然不够灵活并且也产生额外的成本,或是需要10BBASE-T1S的PHY同样支持TC10所定义的Sleep/Wake-up机制。而CAN XL由于继承了CAN本身的休眠唤醒特性且可兼容CAN,有着天然的优势(CAN XL可以使用标准CAN报文作为唤醒信号,而无需为了适应高速率做额外定义)。
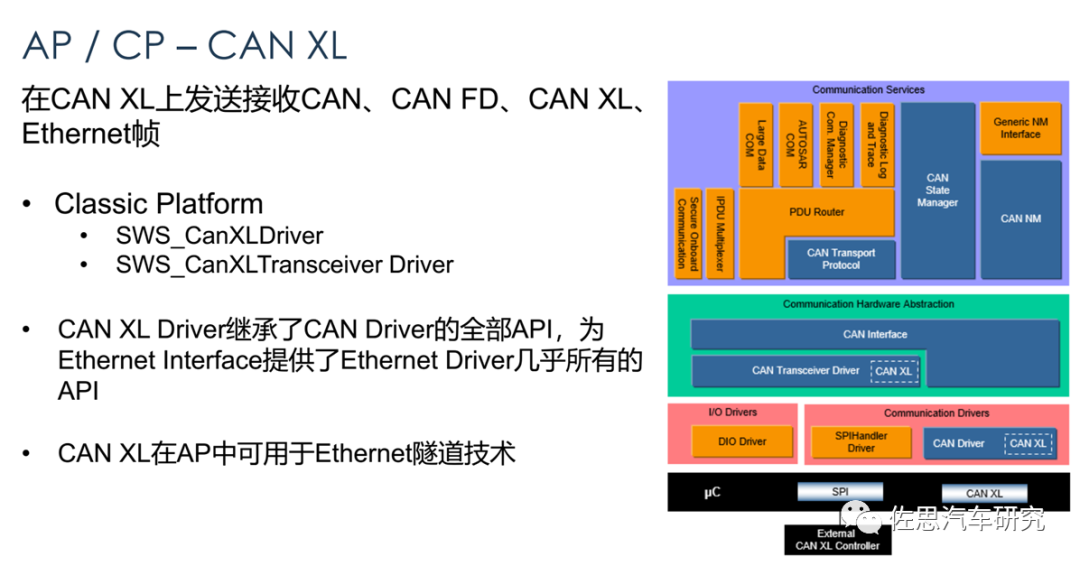
在最新一版AUTOSAR即R22-11上,也对CAN XL做了特别对应,无论AP还是CPU都支持CAN XL。
CAN XL目前最大的缺点是物理层还未定型,标准不够完善,而其竞争对手车载以太网10Base-T1S已经完成了所有标准,在2019年底发布了IEEE 802.3cg标准,并且ADI、Microchip已经有相关产品量产。
审核编辑:汤梓红
-
CAN总线通讯原理-原来这么简单!#总线通讯 #总线传输 #汽车CAN总线 #电路知识安泰小课堂 2025-04-24
-
CAN总线基础知识汇总#CAN #CANoe #汽车总线北汇信息POLELINK 2024-11-04
-
什么是CAN时钟?#CAN #汽车CAN总线 #CANoe北汇信息POLELINK 2024-10-29
-
CAN/CAN FD/CAN XL三大总线协议解读,是逐步替代关系吗?2024-08-12 7932
-
什么是CAN总线通信?CAN总线工作原理2024-02-19 11476
-
CAN总线访问与仲裁机制#汽车CAN总线北汇信息POLELINK 2023-10-20
-
can总线为什么要用双绞线?can总线不用双绞线可以吗?2023-09-14 8207
-
CAN总线的位定时与同步机制#汽车CAN总线北汇信息POLELINK 2023-07-17
-
CAN 总线错误检测机制#can总线北汇信息POLELINK 2023-05-26
-
高速CAN总线和低速CAN总线的特性2023-04-07 4454
-
CAN总线为什么这么火,CAN总线是什么2022-01-15 6879
-
CAN总线发展与其他总线的比较综述2021-08-02 1067
-
CAN总线概述及应用_CAN总线的应用案例(汽车CAN总线应用)2018-05-07 36495
-
CAN总线应用—汽车领域2011-12-14 1027
全部0条评论

快来发表一下你的评论吧 !
