

GMSL相机是GigE Vision相机最有力的替代方案吗?
描述
GigE Vision是基于以太网基础架构和协议的网络相机接口标准。它广泛用于工业领域。ADI公司的 GMSL 是一种专门用于视频数据传输的点对点串行链路技术,最初是为汽车摄像头和显示应用而设计的。
这两种技术都旨在扩展图像传感器视频数据的传输距离,但每种解决方案有其各自的特性。多年来,我们看到越来越多的GMSL相机在汽车之外的领域得到采用,它们通常作为GigE Vision相机的替代方案。
典型系统架构
图像传感器连接
GigE Vision相机的信号链(如图1所示)通常由三个主要元件组成:图像传感器、处理器和以太网PHY。处理器将图像传感器中的原始图像数据转换为以太网帧,该过程通常涉及图像处理和压缩或帧缓冲,以使数据速率适合以太网支持的带宽。

图1.GigE Vision相机传感器侧的主要信号链元件。
GMSL相机的信号链(如图2所示)通常更加简单,仅包含图像传感器和串行器。在典型应用中,串行器转换图像传感器中的原始数据,然后以其原始格式通过链路发送。这些相机无需处理器,设计更简单,更适合需要小尺寸相机和低功耗的应用。

图2.GMSL相机传感器侧的主要信号链元件。
主机处理器连接
GigE Vision相机因其与众多主机设备的兼容性而受到业界的广泛认可。千兆以太网端口几乎是个人计算机(PC)或嵌入式平台的标准配置。一些GigE Vision相机可以使用通用驱动程序,提供真正的即插即用体验。
GMSL相机需要主机侧提供解串器。在大多数用例中,主机设备是带有一个或多个解串器的定制嵌入式平台。解串器通过其MIPI发送器以图像传感器MIPI输出的原始格式传输图像数据。对于此类相机,每种定制相机设计都需要一个匹配的驱动程序,就像任何其他MIPI摄像头一样。然而,如果图像传感器的驱动程序已存在,则一对SerDes只需要几个预设寄存器或执行几次寄存器写操作,就能将视频流从相机传输到SoC。
当仅使用一个相机时,GigE Vision在系统复杂性方面可能比GMSL有一些优势,因为它可以直接连接到具有以太网端口的PC或嵌入式平台。然而,当使用多个GigE相机时,就需要以太网交换机。它可以是专用以太网交换机设备、具有多个以太网端口的网络接口卡(NIC)或多个以太网端口与SoC之间的以太网交换IC。在某些情况下,这将导致最大总数据速率降低,更糟糕的是,这将带来不可预测的延迟,具体情况取决于相机和终端设备之间的接口。参见图3。

图3.典型GigE Vision网络。
在GMSL相机系统中,一个解串器可以连接多达四个链路,其MIPI C-PHY或D-PHY发送器支持所有四个相机的总带宽。只要SoC能够应对聚合后的数据速率,使用一个或多个GMSL器件就不会影响带宽或增加过多系统复杂性。

图4.典型GMSL相机到主机的连接。
特性比较
传感器接口
GMSL串行器仅支持并行LVDS (GMSL1)和MIPI (GMSL2/GMSL3)传感器接口。MIPI是消费电子和汽车摄像头广泛使用的图像传感器接口,因此GMSL相机可以支持种类众多的图像传感器。然而,由于GigE Vision相机内部使用了处理器,其在传感器接口方面更加灵活。
视频规格
工作原理
图5显示了连续视频流中数据从图像传感器传输到GMSL链路或GigE网络的时序图示例。

图5.视频传输时序图。
在视频流的每一帧中,图像传感器在曝光周期之后立即发出数据,然后在下一帧开始之前进入空闲状态。示例图更好地展示了全局快门传感器的情况。对于滚动快门传感器,其曝光和读出是每行单独控制的,因此帧级别上的曝光和读出周期会有重叠。
传感器侧的GMSL串行器对图像传感器中的数据进行串行化,然后立即通过其专有协议将数据传输到链路。
GigE Vision相机中的处理器会缓冲并且通常还会处理图像传感器中的数据,然后将视频数据排列在以太网帧中并将其发送到网络。
链路速率
链路速率规定了链路上数据传输的理论最大速度。当比较不同数据链路技术时,链路速率通常是关键指标。GMSL2、GMSL3和GigE Vision均使用离散的固定链路速率。
GMSL2支持3 Gbps和6 Gbps的数据速率。GMSL3支持12 Gbps的数据速率,并且所有GMSL3设备都以GMSL2协议向后兼容GMSL2设备。
GigE Vision遵循以太网标准。GigE、2.5 GigE、5 GigE和10 GigE Vision相机经常出现在常见应用中。顾名思义,它们分别支持1 Gbps至高达10 Gbps的链路速率。先进的GigE Vision相机将支持100 Gbps链路速率的100 GigE。对于GigE Vision,所有高速协议都将向后支持低速协议。
尽管链路速率与视频分辨率、帧速率和延迟密切相关,但仅根据链路速率很难对这两种技术进行直接比较。
有效视频数据速率
在数据通信中,有效数据速率描述了不包括协议开销的数据速率容量,此概念也适用于视频数据通信。通常,一个数据包或一帧中传输的有效视频数据量为:像素位深度×像素数。图6说明了有效视频数据和开销之间的关系。

图6.数据帧/数据包中的有效载荷和开销。
GMSL以数据包的形式传输视频数据。GMSL2和GMSL3设备使用固定的数据包大小,因此有效视频数据速率也有明确定义。以GMSL2设备为例。当链路设置为6 Gbps时,建议使用不超过5.2 Gbps的视频带宽。然而,由于链路还承载来自传感器MIPI接口的一些开销和消隐时间,因此5.2 Gbps反映了所有输入MIPI数据通道的聚合数据速率,而不是每秒5.2 Gb的视频数据。
以太网以帧的形式传输数据。GigE Vision没有标准帧大小,它通常作为软件解决方案的一个权衡因素来提高效率(长帧的优势)或减少延迟(短帧的优势)。对于这些相机,开销通常不超过5%。较高速度的以太网会降低使用长帧的风险,以实现更好的有效视频数据速率。
这两种技术都以突发方式传输数据。因此,较长期间(一个视频帧或更长时间)内的平均数据速率甚至可能低于传输期间的有效视频数据速率。对于GMSL相机,突发时间仅取决于图像传感器的读出时间,实际应用中的突发比可能达到100%以支持完整的有效视频数据速率。GigE Vision相机可能用在更复杂和不可预测的网络环境中,在这种情况下,为了避免数据冲突,突发比通常较低。示例参见图7。

图7.GMSL和GigE Vision网络的数据流量。
分辨率和帧速率
分辨率和帧速率是摄像机的两个至关重要的规格,它们是提高链路速率的关键驱动因素。对于这些规格,两种技术各有利弊。
GMSL设备不提供帧缓冲和处理。分辨率和帧速率全部取决于图像传感器或传感器侧ISP在链路带宽内的支持能力,而这通常是分辨率、帧速率和像素位深度之间的简单权衡。
GigE Vision的模型更为复杂。尽管在许多情况下其可用链路速率比GMSL慢,但它可以利用额外的缓冲和压缩来支持更高分辨率和/或更高帧速率。然而,这一切的代价是延迟和功耗的增加,并且相机系统两侧需要使用昂贵的元件。在一些不太常见的用例中,此类相机也以较低帧速率传输原始图像数据。
延迟
延迟是摄像机的另一个关键规格,尤其是在实时处理数据和做出决策的应用中。
从串行器的输入/传感器的输出到解串器的输出/接收SoC的输入,GMSL相机系统的延迟较低且具有确定性。
由于内部处理和更复杂的网络流量,GigE Vision相机的延迟通常较高且不具有确定性。然而,这些延迟并不总是会导致系统级延迟更长,尤其是当相机侧处理属于系统图像流水线的一部分且更专用、更高效时。
其他特性
传输距离
根据设计,GMSL串行器和解串器可在乘用车中使用同轴电缆将数据传输15米之远。但是,只要相机硬件系统满足GMSL通道规范,则传输距离不限于15米。
通过以太网协议,GigE Vision可以使用铜缆将数据传输100米之远,使用光纤甚至可以更远,不过它可能会失去一些特性,例如以太网供电(PoE)。
PoC和PoE/PoDL
这两种技术都能够通过同一根电缆传输电力和数据。GMSL使用同轴电缆供电(PoC),GigE Vision针对4对以太网使用PoE,针对单对以太网(SPE)使用数据线供电(PoDL)。大多数GigE Vision相机使用传统的4对线和PoE。
PoC很简单,采用同轴电缆配置的相机应用通常默认使用这种方式。在这种配置中,链路上的电力和数据来自单根电线,并且PoC电路仅需要几个无源元件。
支持1 Gbps或更高数据速率的PoE电路需要专用电路,相机和主机(或交换机)侧均需要有源元件。这使得PoE功能成本更高且不易获得。支持PoE的GigE Vision相机通常还具有本地外部供电选项。
外设控制和系统连接
GMSL作为专用相机或显示器链路,其并非设计用来支持各种各样的外围设备。在典型的GMSL相机应用中,链路传输控制信号(UART、I2C和SPI),仅与温度传感器、环境光传感器、IMU、LED控制器等相机外设进行通信。使用GMSL作为相机接口的较大系统通常还有其他低速接口,例如CAN和以太网,以便与其他设备通信。
GigE Vision相机一般利用其内置处理器处理相机外设控制。作为工业应用中流行的连接解决方案,工业以太网有多种标准协议来支持多样化的机器和设备,GigE Vision相机通过其软件和硬件接口直接连接到网络。
相机触发和时间戳
GMSL链路的正向和反向通道均支持微秒级的低延迟GPIO和I2C信号隧道,从而支持不同的相机触发/同步配置。GMSL相机系统中的触发信号源可以来自解串器侧的SoC,也可以来自串行器侧的图像传感器之一。
GigE Vision相机通常通过专用引脚/端口或以太网触发/同步数据包来提供硬件和软件触发选项。在典型应用中,硬件触发作为标准方法,用于与其他相机或非相机设备进行响应灵敏且准确的同步。这些相机的软件触发的主要问题是网络延迟。尽管有一些协议可用于提高同步精度,但它们要么精度不够高(网络时间协议(NTP),同步到毫秒级),要么性价比不高(精密时间协议(PTP),同步到微秒级,但需要兼容的硬件)。
当在以太网上使用同步协议时,来自同一网络的所有设备(包括GigE Vision相机)将能够在同一时钟域中提供时间戳。
GMSL没有时间戳功能。有些图像传感器可以通过MIPI嵌入式报头提供时间戳,但这通常不与更高级别系统上的其他设备相关。在某些系统架构中,GMSL解串器会连接到PTP网络上的SoC以使用集中式时钟。如果需要此功能,请使用 AD-GMSL2ETH-SL 作为参考。
结语
总之(参见表1),GMSL是现有GigE Vision解决方案的有力替代方案。与GigE Vision相机相比,GMSL相机通常能以更低的成本、更低的功耗、更简单的系统架构和更小的系统尺寸提供同等或更好的链路速率和特性。此外,由于GMSL最初是为汽车应用而设计的,因此它已经在恶劣的环境中经过了汽车工程师几十年的验证。在可靠性和功能安全至关重要的系统开发中,GMSL将为工程师和系统架构师提供信心保证。
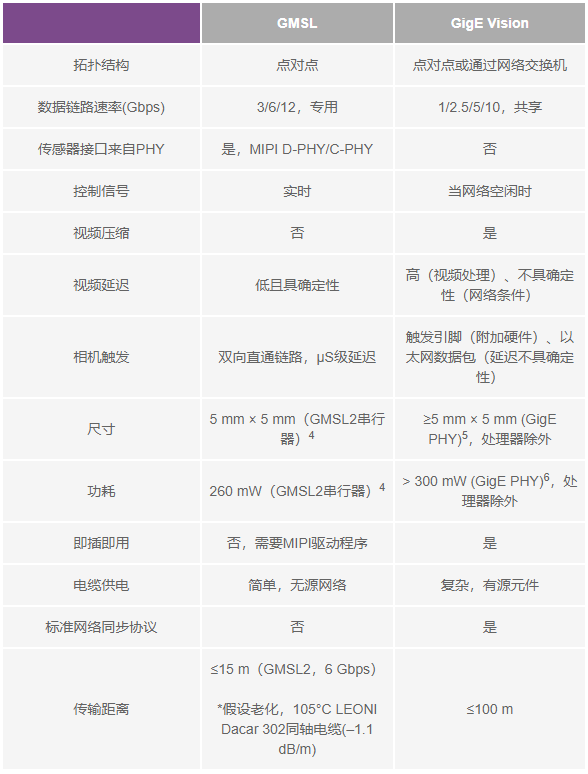
表1.GMSL与GigE Vision主要特性比较

审核编辑:刘清
-
Onsemi ACUROS CQD 1920L GigE SWIR相机:高性能短波红外成像解决方案2026-06-08 168
-
工业相机GigE数据接口的优势及应用2025-07-16 1720
-
基于FPGA的GigE Vision相机图像采集方案设计2025-01-07 2732
-
Teledyne高性能5GigE多光谱线扫描相机已投入生产2023-05-18 2547
-
创龙C66x平台GigE工业相机图像采集案例2018-10-23 6670
-
关于6678与gigE vision 相机的连接问题2018-06-21 2447
-
FPGA与GigE相机的遵循GigE Vision标准的通信2016-01-12 8208
-
用MAX 配置GIGE相机时出现错误0xbff6902c,无法连接到相机2013-08-19 7349
-
如何用Labview中vision assistant 8.5加载JAI Gige接口相机2013-04-27 7959
全部0条评论

快来发表一下你的评论吧 !
