

大象机器人发布万元级水星Mercury人形机器人产品系列
机器人
描述
十四五机器人产业发展规划指出机器人的研发、制造、应用是衡量一个国家科技创新和高端制造业水平的重要标志。当前,机器人产业蓬勃发展,正极大改变着人类生产和生活方式,为经济社会发展注入强劲动能。
人形机器人作为机器人产业中重要的一环,其有着独特的技术和功能,广泛应用于教育、科研、服务、娱乐和工业等领域,带来了前所未有的便利和效率。
2023年10月,工信部发布了《人形机器人创新发展指导意见》,报告中指出,机器人技术已有成熟的技术基础,以大模型等人工智能技术突破为引领,人形机器人技术加速演进,已成为科技竞争的新高地、未来产业的新赛道、经济发展的新引擎,发展潜力大、应用前景广。
结合大象机器人的产品布局与发展路径,公司正式发布万元级售价的水星Mercury人形机器人产品系列。
水星Mercury机器人系列共有三款产品:
水星Mercury A1 七轴协作机械臂
水星Mercury B1 半人形双臂机器人
水星Mercury X1 通用人形机器人
三款产品的工业设计皆由瑞典团队精心设计而成,集成七大机器人核心算法,多种使用与开发方式,旨在满足教育、科研、服务、娱乐和VR遥操作等五大应用场景的需求。
“
水星机器人产品家族
水星Mercury A1
七轴协作机器人
水星Mercury A1是一款轻量级7自由度协作机器人,由7颗大象机器人自研谐波模组驱动;全新的七轴工业设计由瑞典团队精心操刀,整机使用超轻量碳纤维外壳,减重的同时大幅提高整机强度和刚性。
水星Mercury A1采用单主控,双副控控制方式。主控采用Cortext A72 - 1.5GHz、搭载2.0英寸IPS-LCD电容触摸屏,配合大象机器人自主开发的机器人便捷开发操作系统myPanel OS,可实现无需编程的快速部署应用。

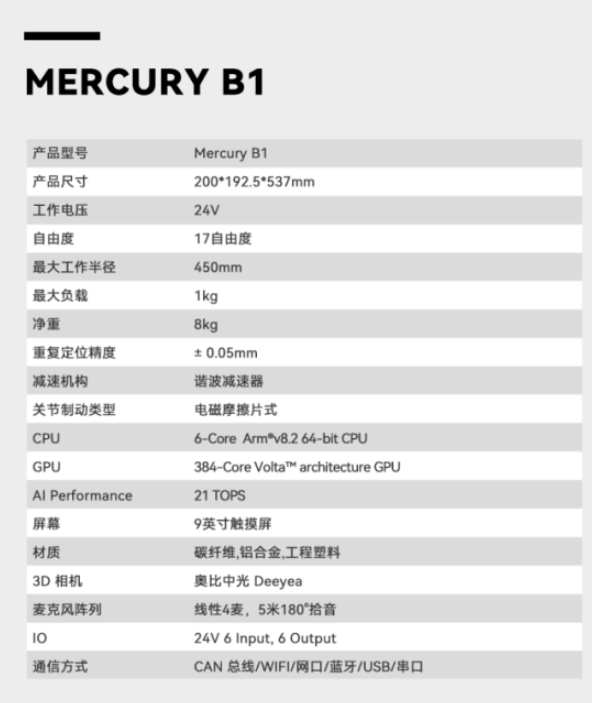
水星Mercury B1
双七轴半人形机器人
水星Mercury B1双臂半人形机器人共拥有17个自由度,搭载两台A1七轴机械臂,具备单臂独立操作和双臂协同操作的能力;
头部搭载一块9英寸高清液晶显示触摸屏,支持多点操控及用户定制化表情显示;搭配NVIDIA Xavier主控芯片和四个独立副控进行控制。配合一体式3D摄像头,可以完成2D/3D机器视觉引导、抓取以及VR实现遥操作。
作为ChatGPT for Robotics最早适配的机器人品牌,Mercury B1内置了高清晰度麦克风阵列,支持实时语音采集,将带来AI语音智能识别交互的全新体验。
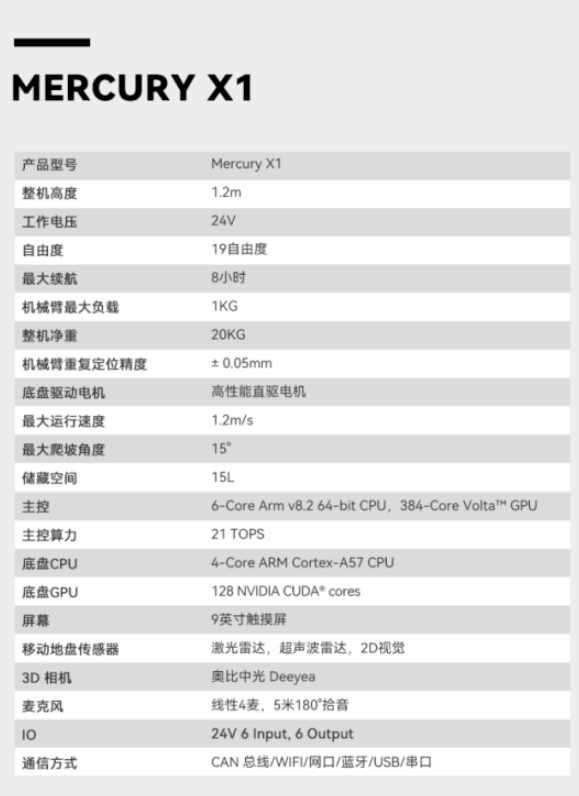
水星Mercury X1
通用人形机器人
水星Mercury X1轮式人形机器人共拥有19自由度,由水星Mercury B1和高性能移动底座组合而成。
整机配备英伟达Jetson Xavier和Jetson Nano双主控,上半身独立四个副控,下半身独立一个副控进行搭配控制。
移动底座配备高性能激光雷达,超声波传感器和2D视觉等丰富感知;采用直驱电机驱动,最大运行速度达1.2m/s; 最大爬坡高度2CM;最大爬坡角度15度。整机最大续航高达8小时,满足个人及商业应用的需求。
“
力源系列谐波模组
大扭矩轻自重
全新自研模组输出澎湃动力
水星机器人全系产品搭载大象机器人全新自研力源系列谐波模组。全新模块化设计模组标配电磁制动刹车,中空走线。具有高精度、高惯量、低自重等特点。
最大输出扭矩可达80Nm,编码器分辨率19Bit,重复定位精度高达0.6弧分。配合机械臂整机外壳采用的铝合金与碳纤维材质,进一步降低整机自重,优化动力表现。
“
强大算力加持
赋能具身智能新疆界
水星Mercury人形机器人B1,X1采用了全新英伟达Jetson Xavier边缘计算核心作为主控模组。
高达21TOPS 的 AI 性能使这些模组为处理视觉测距、传感器融合、定位和地图构建、障碍物检测和路径规划算法提供了强大的算力保障,为具身智能领域开发和应用创造无限可能。
尤其在克服VR遥操作技术难题的过程中,确保获取低延迟的视频流⼀直是关键挑战之⼀。
大象机器人采⽤了⼀项创新性的解决⽅案,即通过利⽤NVIDIA Xavier平台提供的Accelerated GStreamer插件,成功实现了GPU加速的视频编解码,在保障实时性的同时,最⼤程度地优化带宽利⽤率,为VR遥操作提供硬件加速。
“
七大集成算法
打造机器智能

水星Mercury机器人系列产品首次集成了七大智能算法,整体提升机械臂运动学和动力学表现,抑制震动,双臂流畅协同,与视觉、激光和语音传感器深度融合在人工智能的加持下全方位打造立体的机器智能。
水星七轴机械臂控制:
具备的运动学算法可实现直线、圆弧、样条等相应轨迹。
七轴机械臂又被称为冗余机械臂,其拥有形同人手的冗余结构,可维持末端位姿不变,仅修改冗余臂角即可实现零空间运动。
冗余臂角的存在,令机器人无需做大幅度姿态旋转即可移动到相邻的连续位置,在小范围的旋转运动上具备得天独厚的优势。
水星机器人系列还具备拖动示教、机械臂软浮动、碰撞检测、速度融合等已在大象机器人其他产品线上实现的功能。
双臂协同:
从人类具备双手协同工作中获得设计灵感,myBlockly集成双臂同步协同算法,实现双臂协同工作,使机器人在复杂和精密的任务中表现得更加灵活和高效。同时具备双臂自干涉检测、同步、配合等常规算法。
SLAM激光导航:
采用先进的RTABMAP 3D与2D配合的SLAM导航技术。通过激光雷达感知平面环境,使用3D摄像头实时构建地图并同时定位,水星Mercury实现了智能导航、避障,具有高效而精准的移动能力。
单目视觉:
借助先进的视觉算法和基于OpenCV的技术,水星机械臂实现了多项智能识别功能。颜色、形状、Aruco标记、特征点以及YOLO目标检测等多重识别方式,使机械臂能够快速、精准地应对各类任务。
无论是色彩辨识、形状定位,还是迅速捕捉特定标记物,水星Mercury机械臂都展现出卓越的灵活性和高效性。在复杂多变的工作环境中,它能够以智能的方式完成任务,是工作场景中的得力助手。
双目视觉:
水星Mercury机器人引入了先进的室内3D视觉重建技术,能够通过激光雷达和摄像头,精准捕捉室内环境。借助特征提取和深度估计,实时生成精确的三维地图,为智能导航和环境理解提供强大支持。
语音识别:
myBlockly结合了语音识别和GPT模型,可以将用户的语音指令转化为Blockly代码。用户只需通过简单的口头指令,即可生成复杂的Blockly代码,无需手动输入,大大提高了编程的效率。
ChatGPT融合:
myBlockly 集成了ChatGPT,通过自然语言与ChatGPT交互实现AI编程。用户无需了解编程语言,只需描述程序的功能,即可实现一键生成Blockly积木块,轻松构建复杂程序。
“
三大集成软件操作方式
全新自研操作软件
重新定义人机交互
符合直觉的人机交互
轻松释放水星无限潜力
水星Mercury A1机械臂内置的“myPanel”搭配两英寸触摸屏,可实现机械臂的快速示教编程,无需任何额外硬件设备即可调试部署。
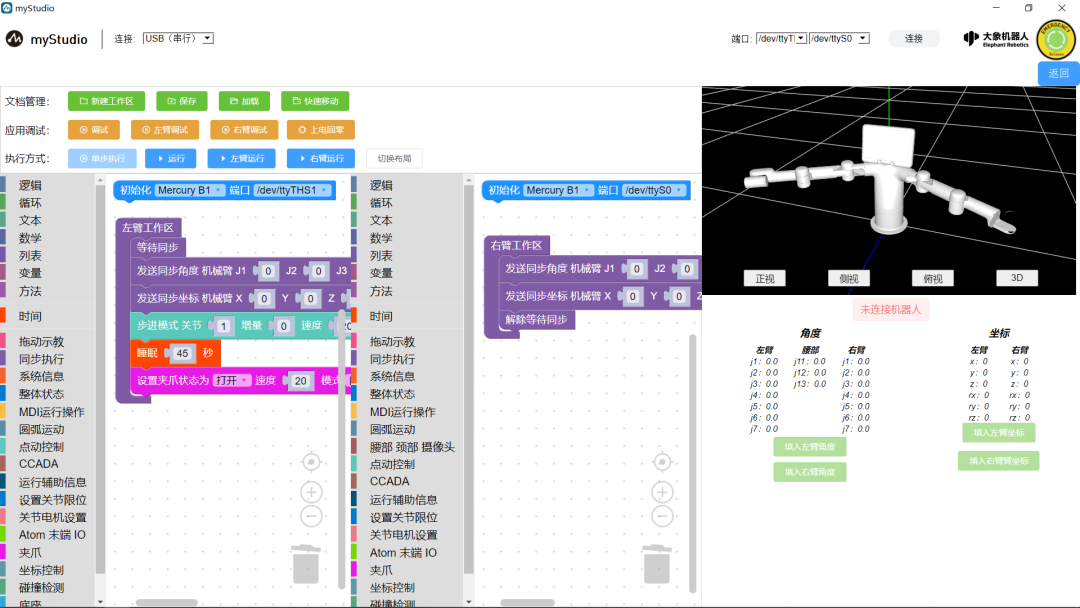
myBlockly
图形式编程开发软件
全新myBlockly引入了创新的双编辑栏功能,为用户提供更加便捷和高效的编程体验。
同时,myBlockly还接入了底座SLAM控制模组api,使得人形机器人的整机编程和控制无缝结合,进一步扩展了水星Mercury机器人的应用领域。
通过预设的快捷指令,用户可以快速编写左右双臂的控制程序,实现双臂的高效协同工作,从而达到“1+1>2”的效果。
VR实时操控
同时配合最新meta Quest3开发的水星VR遥控操作(MVRM),可实现低时延的VR实时控制,为特殊危险场合提供全新的机器人解决方案。
水星Mercury机器人可实现16自由度的VR操作,支持有线和无线连接,可组合适配2D/3D相机和各式夹爪、吸泵和灵巧手。
得益于NVIDIA Jetson Xavier平台所提供的Accelerated GStreamer插件,MVRM操作延迟小于300MS;操作精度达到±1MM,目前已经率先适配meta Quest3系列。
多元软件生态
支持主流仿真平台
水星Mercury机器人系列坚持大象软件开源传统,支持丰富的软件生态和主流编程语言。
同时支持包括ROS2, Moveit, Gazebo,Mujoco和Issacsim等主流仿真软件,便于用户使用机器人在仿真系统里模拟机器运动,提高了智能自主学习和快速迭代的能力。
“
支持二次开发
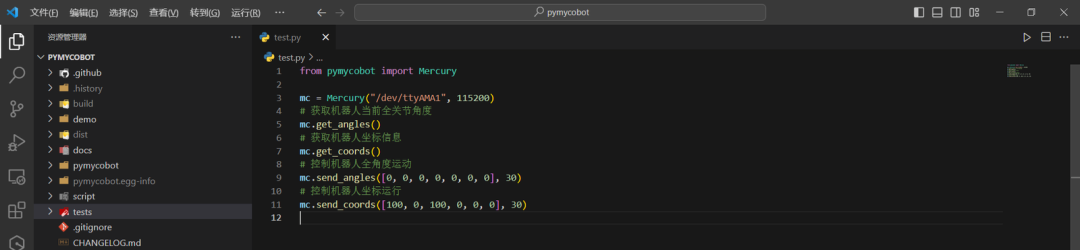
Python API
- pymyCobot
pymyCobot 是一个通用的 Python 控制库,旨在支持大象机器人旗下多款机器人,提供了一个简单而灵活的接口,方便开发者对机器人进行控制。
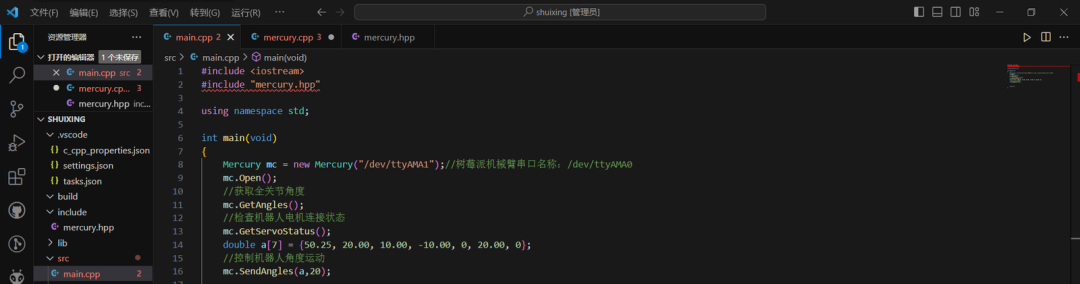
C++ API
- Mercury API
Mercury API是一款专为水星Mercury机器人设计的C++控制接口。简洁易用,提供对机器人关节、姿态和执行器的灵活控制,助力开发者快速实现各类机器人应用。
“
五大应用场景
教育场景
机器人教育教学套装,水星Mercury A1协作机械臂可搭配2D或3D视觉模组,可以实现图像识别、模型训练、机器人控制、运动规划、机器人空间标定、视觉与机器人手眼标定等多个学科不同领域的知识学习。
科研场景
一站式科研具身智能人形机器人 —— 水星Mercury B1。
得益于自研控制算法与自研模组的应用,B1 可用于双臂协同控制、双臂运动规划、视觉感知加机器人应用等多个方向研究与应用,是人形机器人应用研究的首选机型。
三维重建,3D SLAM 自动导航场景:轮式全人形机器人——水星 Mercury X1。采用3D 摄像头搭配360全向雷达,搭配英伟达核心主控,实现3D场景扫描建图,支持ROS 环境扩展开发,支持加载和保存环境地图,让机器人融入实际环境,进行机器人移动、自动导航、3D建图等多种应用。
服务场景
水星Mercury系列的强悍性能及内在表现,搭配优雅的外观设计,使得水星Mercury机器人不仅可以用于教育、科研场景,也可以用于商业服务场景,通过不同的末端配件,搭配各种日常家具家电,机器人可以服务于实际的公司展示、商业展会、行业交流等应用环境,展现机器人服务员的炫酷应用。
娱乐场景
搭配自定义的末端执行器,进行模拟人类的动作开发,水星Mercury机器人可以实现类人动作应用,进行个人应用的创意开发。
VR遥操作场景
搭配VR设备,实现远程操控的机器人应用
让机器人控制可以不受时空限制,可以广泛用于客户不同场景的远程落地解决方案。提供双端软件覆盖,支持VR设备端、机器人端UI界面控制,快速搭建机器人远程控制场景,让人形机器人更加实用。
丰富周边生态
水星Mercury机器人系列提供完整的辅助硬件,包括各式夹爪、吸泵,并且可以同时搭配2D和3D视觉组合使用,真正实现机器人“手眼合一”。
提供3大类10余种配件,跟随产品同步上市。满足你的个性化场景开发需求,摆脱常规机器人配件选型的应用难题。
电动夹爪
自适应夹爪:最大夹取宽度120mm,最大负载1KG,具备力控抓取,自动适应物体宽度,适合多种尺寸的规则未知物体。
张角式夹爪:最大夹取角度90度,最大负载1KG,具备力控抓取,支持自动适应宽度,配合柔性指尖适合形状不规则的物体。
平行夹爪:最大夹取宽度50mm、最大负载1KG,具备力控抓取,可控闭合宽度,适合形状规则的精确物体。
吸盘吸泵
一体式吸盘吸泵:最大负载1KG,一体式安装应用,无需复吸泵杂线缆连接,支持IO控制。
模块化吸盘吸泵:多吸头距离可调,适合平整物体,最大负载1KG,支持IO控制。
摄像头模组
2D摄像头模组:RGB彩色2M 像素USB摄像头,可直接接入机械臂末端USB口。
3D摄像头模组:RealSense 3D 摄像头,支持采集深度信息。
审核编辑:黄飞
-
万元人形机器人破局者:松延动力靠的是什么?2025-11-09 6231
-
蓝思科技:今年承接智元机器人全系列多款人形机器人业务2025-08-05 4668
-
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品2025-04-25 7393
-
大象机器人水星MercuryX1轮式人形机器人基于物体标记建模的键盘点按操作!2024-08-06 2903
-
技术融合与创新大象机器人水星Mercury X1人形机器人案例研究!2024-04-28 1440
-
自动化革命:大象机器人的Mercury A1机械臂2024-01-15 1603
-
大象机器人首发万元级水星Mercury人形机器人系列2024-01-03 927
-
大象机器人发布万元级水星Mercury人形机器人产品系列,联结未来,一触即达!2023-12-22 1347
-
工匠机器人 vs 大国工匠2022-10-18 1892
-
【教程1】人形街舞机器人-套件检测教程2022-08-12 9411
-
【开发教程1】人形街舞机器人-套件检测教程2022-04-22 4870
-
为什么人形机器人更讨人喜欢?2016-05-12 5315
-
张江发布机器人新品 小二管家机器人初次亮相即受热捧2016-05-04 2912
-
机器人与未来2015-12-29 6825
全部0条评论

快来发表一下你的评论吧 !
