

科学家研发仿生小鼠机器人,可用于灾后救援和探测检修等领域
描述
现今的四足机器人在运动能力方面已经取得显著进步,但与自然界的动物相比,还存在一定的差距。
动物们能够高效地利用其躯干来增强运动能力,比如猫科动物能通过扭转身体顺利通过曲折地形,以及通过躯干储存和释放能量,实现快速移动和灵活转变方向。
近日,在一项研究德国慕尼黑工业大学邴振山博士和所在团队首次揭示了柔性脊柱在提升足式机器人运动能力方面的重要性。
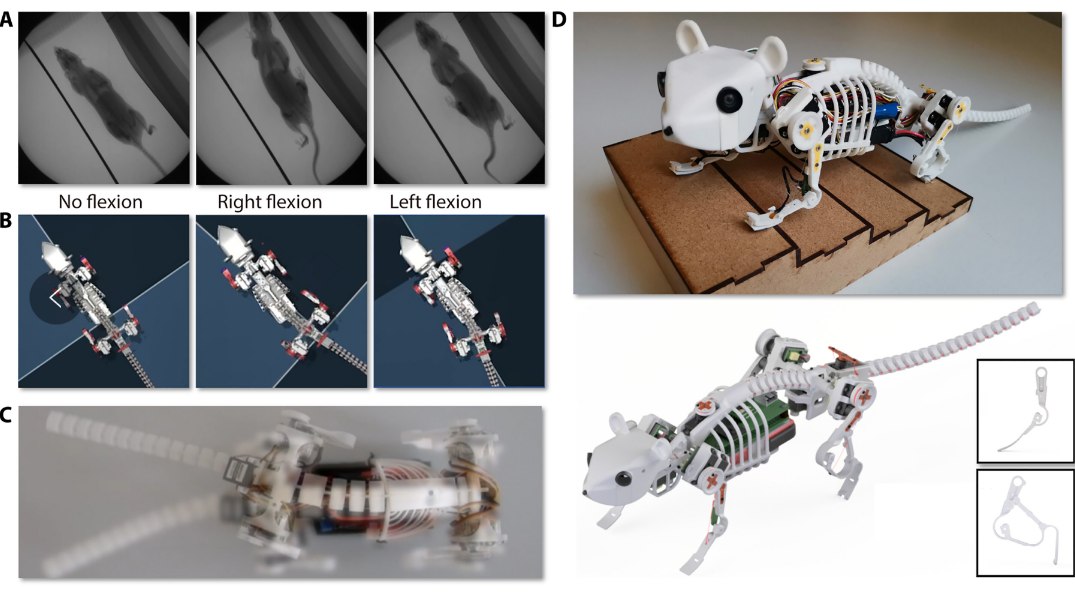
他们设计并开发了一款带有柔性脊柱的老鼠型机器人,并开发了一系列基于脊柱的机器人运动步态和控制算法。通过实验,他们验证了脊柱在提升机器人运动能力,包括稳定性、速度和转弯能力方面的重要作用。
本次研究得到了三位审稿人的高度评价与认可。其中一位审稿人对他们的工作表示极大的赞赏,认为这项成果在仿生四足机器人研究领域具有巨大潜力,论文也突显了本次工作在未来足式机器人发展方向上的重要影响,以及柔性脊柱在提升机器人性能方面的关键作用。
第二位审稿人提供了具体的修改建议,例如增加与优化后的基于模型的控制器和刚性脊柱版本的机器人进行比较的内容。
第三位审稿人则对他们设计的柔性脊柱结构和驱动方式表示赞赏,特别是通过 3D打印技术制造的复杂躯干结构,以及通过精巧设计实现的机器人脊柱的柔性和强度。
此外,审稿人还肯定了他们采用绳驱动方式对机器人结构进行的合理优化。
老鼠机器人的潜在应用领域主要集中在复杂狭小地形的灾后救援、探测检修等任务上。这与生物学家利用训练过的非洲大鼠进行类似任务的现实情况相呼应。
例如,有的生物学家已经通过在大鼠身上安装摄像头模组,并通过训练来控制其运动,从而使它们能够执行探测和侦察等特殊任务。
老鼠机器人与生物大鼠的主要区别在于它们无需经过训练即可执行任务。这些机器人可以自主操作或在操作人员的操控下完成相关任务。
这意味着在执行灾后救援、排雷等任务时,老鼠机器人能够提供更高的灵活性和可控性,同时减少对实际动物的依赖和潜在风险。
“在这项研究过程中,最引人入胜的部分无疑是实验结果证实了理论假设和控制模型。当然,这个过程同样伴随着诸多困难和挑战。”研究人员表示。
由于机器人的高度定制化,测试过程中经常出现各种硬件故障。课题组不得不频繁加班,不断在“测试-故障-维修”的循环中努力。
然而,通过不懈的尝试和反复实验,他们最终通过详细的实验和数据验证了柔性脊柱在提升足式机器人运动能力方面的重要作用。
(来源:Science Robotics)
未来,他们将继续深入研究柔性脊柱在足式机器人运动中的作用。在目前的工作中,他们主要关注了脊柱横向摆动的效果。
接下来,他们打算探索柔性脊柱在纵向平面内摆动对机器人运动能力的影响。
同时,这个新的研究方向将有助于他们更全面地理解柔性脊柱的运动学和动力学特性,以及它如何影响机器人的整体运动效率和灵活性。
通过对脊柱纵向摆动的研究,该团队期望能够进一步提升机器人在复杂地形中的适应性和敏捷性,这对于提升其在灾后救援、侦察探测等应用场景中的实用性将是至关重要的。
对于未来发展邴振山表示:“下一步我计划回国工作,在国内高校中寻求教职位置。希望能够在国内继续老鼠机器人的研究,推动国家机器人技术进步,并培养机器人相关人才。”
-
NASA研发测试新一代火山机器人2015-01-13 4087
-
【Tisan物联网申请】全地形消防侦查机器人2015-10-21 3463
-
各种炫酷的仿生机器人2016-08-24 19675
-
错过这场science机器人盛会,你将被甩开几条街2017-07-05 3822
-
地震中哪些机器人能参与应急救援2017-08-29 3694
-
LabVIEW Robotics 2009在机器人领域的应用2019-05-21 3574
-
智能救援机器人的功能和作用2020-11-30 5166
-
美科学家研发机器人消防员 能理解手势语言2012-04-05 762
-
机器视觉的灾后救援机器人越障系统设计_王宇2017-03-19 939
-
科学家研发“自我修复”机器人,灵感来自动物2018-05-08 3709
-
仿生机器人技术 从蜘蛛得来的灵感2020-03-05 4773
-
科学家研发出可3D打印的自定义机器人2021-01-11 2868
-
中国科学家研发新型仿生手术缝线2021-01-21 2316
-
90后科学家杜韬实现“海星”机器人2021-04-18 2895
-
柔性驱动器领域科学家们有了新的突破2021-05-14 2916
全部0条评论

快来发表一下你的评论吧 !
