

四元数在工业机器人编程操作中的应用
描述
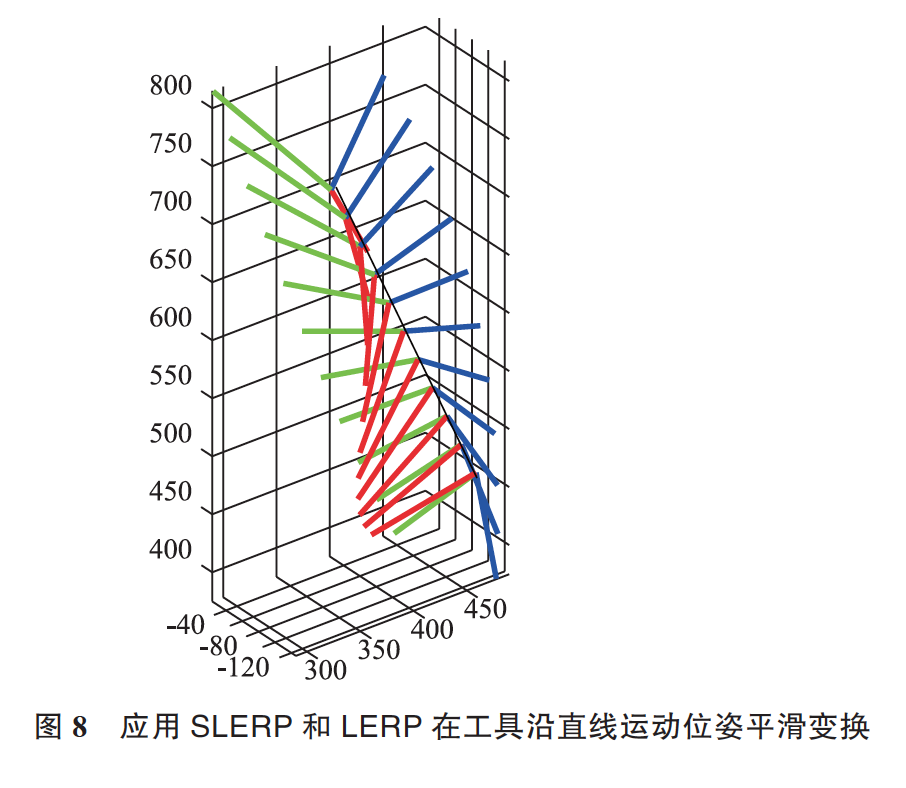
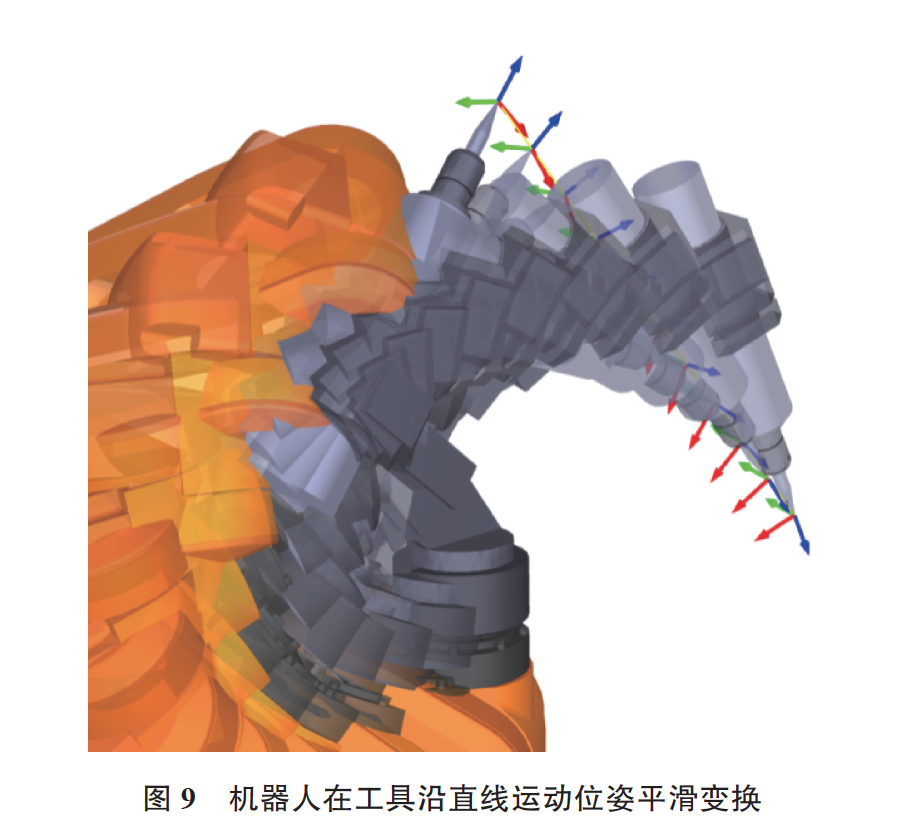
姿态规划在机械臂控制中占有重要的地位,在编程操作时需要应用姿态变换平滑性的插值算法确保机械臂工具动作的柔和度。首先分析四元数法用作姿态描述和变换的数学基础,然后应用四元数姿态插补算法SLERP 编程计算工具姿态变换的旋转角度,用于准确地检测工具角位移的精确度和重复精度,最后引入实例编程说明如何应用四元数姿态插补算法SLERP 和LERP 实现机器人工具姿态的平滑变换。
01
姿态规划在机械臂控制中占有重要的地位,在编程操作时需要应用姿态变换平滑性的插值算法确保机械臂工具动作的柔和度。首先分析四元数法用作姿态描述和变换的数学基础,然后应用四元数姿态插补算法SLERP 编程计算工具姿态变换的旋转角度,用于准确地检测工具角位移的精确度和重复精度,最后引入实例编程说明如何应用四元数姿态插补算法SLERP 和LERP 实现机器人工具姿态的平滑变换。
02
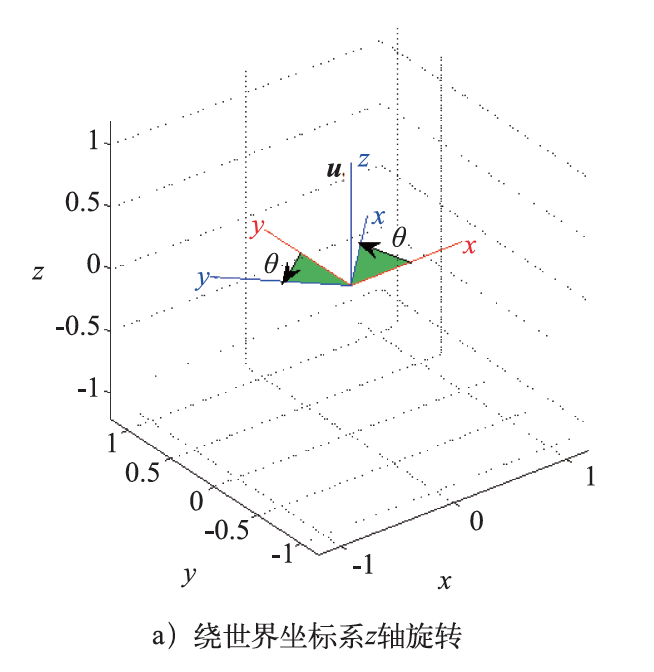
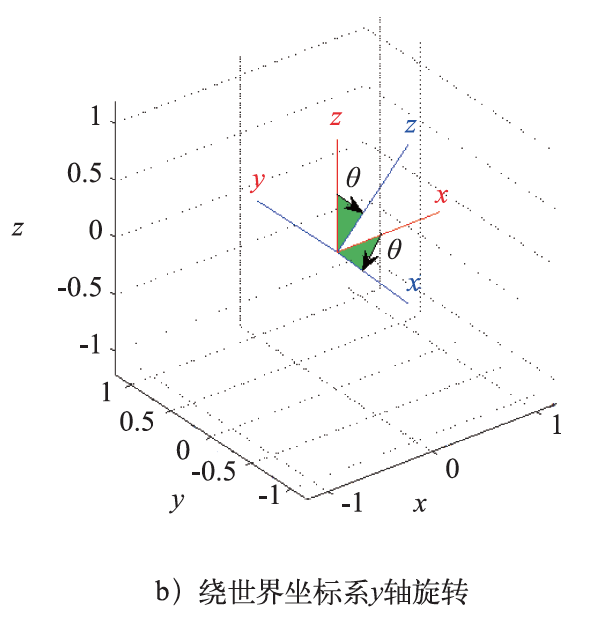
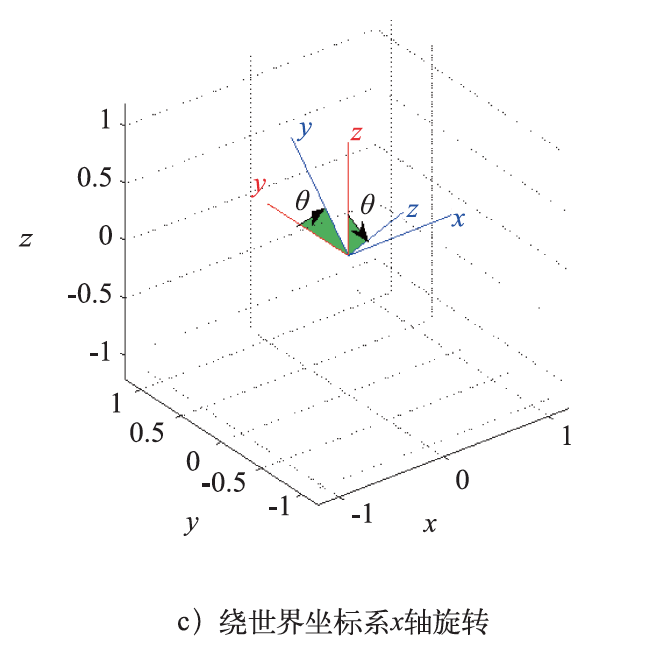
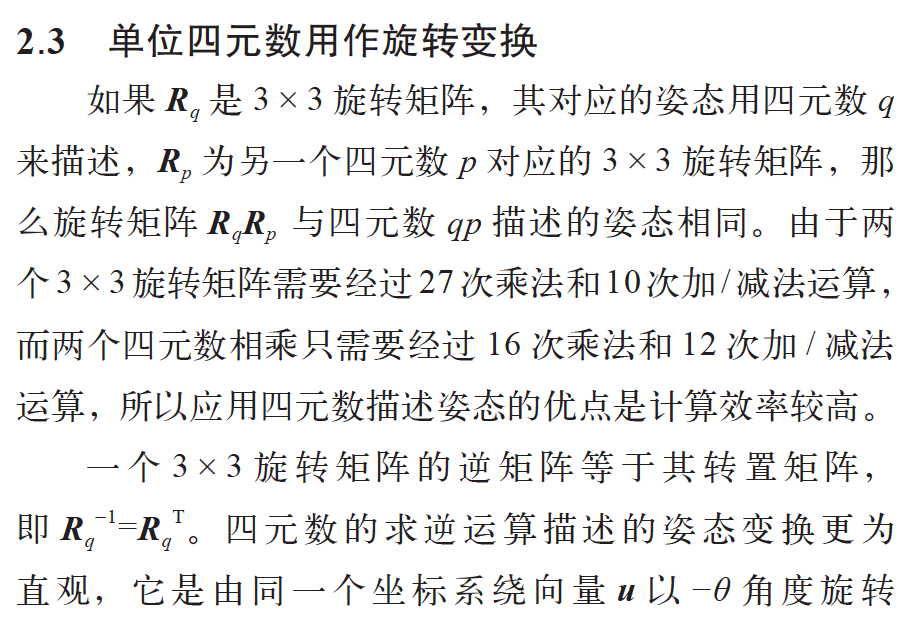
四元数用作姿态描述和旋转变换




03
应用四元数检测工具的角位移
04
结束语
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
工业机器人常用的编程方式2024-09-04 4377
-
工业机器人仿真与编程2021-09-07 2432
-
FANUC 工业机器人编程与联网相关资料推荐2021-07-02 1725
-
工业机器人应用编程考核设备分享2021-07-01 2917
-
四元数数控:工业机器人使用机器视觉系统的原因2021-04-29 1446
-
工业机器人的技术原理2018-11-23 5100
-
零基础玩转工业机器人2018-10-29 5037
-
减速机在工业机器人的应用2018-09-18 3863
-
四元数法在4R机器人位置分析中的应用_杨爱民2017-03-14 1388
-
工业机器人与金属成形机床集成的四大应用2015-12-04 3847
-
华南机器人应用培训中心工业机器人培训班招生2015-09-02 14445
-
工业机器人的四大核心部件2015-02-12 20769
-
什么是工业机器人2015-01-19 6815
-
[转帖]工业机器人的基础知识2010-05-18 4008
全部0条评论

快来发表一下你的评论吧 !
