

PTO脉冲的产生与使用方法介绍
电子说
描述
PTO脉冲是一种占空比为50%、周期可调的方波脉冲。PTO脉冲的频率范围为1~65535 Hz(单段)或1~100000 Hz(多段),PTO脉冲数范围为1~2147483647。
在设置脉冲个数时,若将脉冲个数设为0,系统会默认个数为1;在设置脉冲周期时,如果周期小于两个时间单位,系统会默认周期值为两个时间单位,比如时间单位为ms,周期设为1.3ms,系统会默认周期为2ms。另外,如果将周期值设为奇数值(如75ms),产生的脉冲波形会失真。
** PTO脉冲可分为单段脉冲串和多段脉冲串,多段脉冲串由多个单段脉冲串组成。**
1.单段脉冲串的产生
** 要让高速脉冲输出端子输出单段脉冲串,须先对相关的控制字节和参数进行设置,再执行高速脉冲输出PLS指令。**
图1所示是一段让Q0.0端子输出单段脉冲串的程序。在PLC首次扫描时,SM0.1触点闭合一个扫描周期,复位指令将Q0.0输出映像寄存器(即Q0.0线圈)置0,以便将Q0.0端子用作高速脉冲输出;当I0.1触点闭合时,上升沿P触点接通一个扫描周期,MOV_B、MOV_W和MOV_DW依次执行,对高速脉冲发生器的控制字节和参数进行设置,然后执行高速脉冲输出PLS指令,让高速脉冲发生器按设置产生单段PTO脉冲串并从Q0.0端子输出。在PTO脉冲串输出期间,如果I0.2触点闭合,MOV_B、MOV_DW依次执行,将控制字节设为禁止脉冲输出,脉冲个数设为0,然后执行PLS指令,高速脉冲发生器马上按新的设置工作,即停止从Q0.0端子输出脉冲。单段PTO脉冲串输出完成后,状态位SM66.7会置1,表示PTO脉冲输出结束。
若网络2中不使用边沿P触点,那么在单段PTO脉冲串输出完成后如果I0.1触点仍处于闭合状态,则会在前一段脉冲串后面继续输出相同的下一段脉冲串。
2.多段脉冲串的产生
多段脉冲串由多个单段脉冲串组成,每个单段脉冲串的参数可以不同,单段脉冲串中的每个脉冲参数也可以不同。
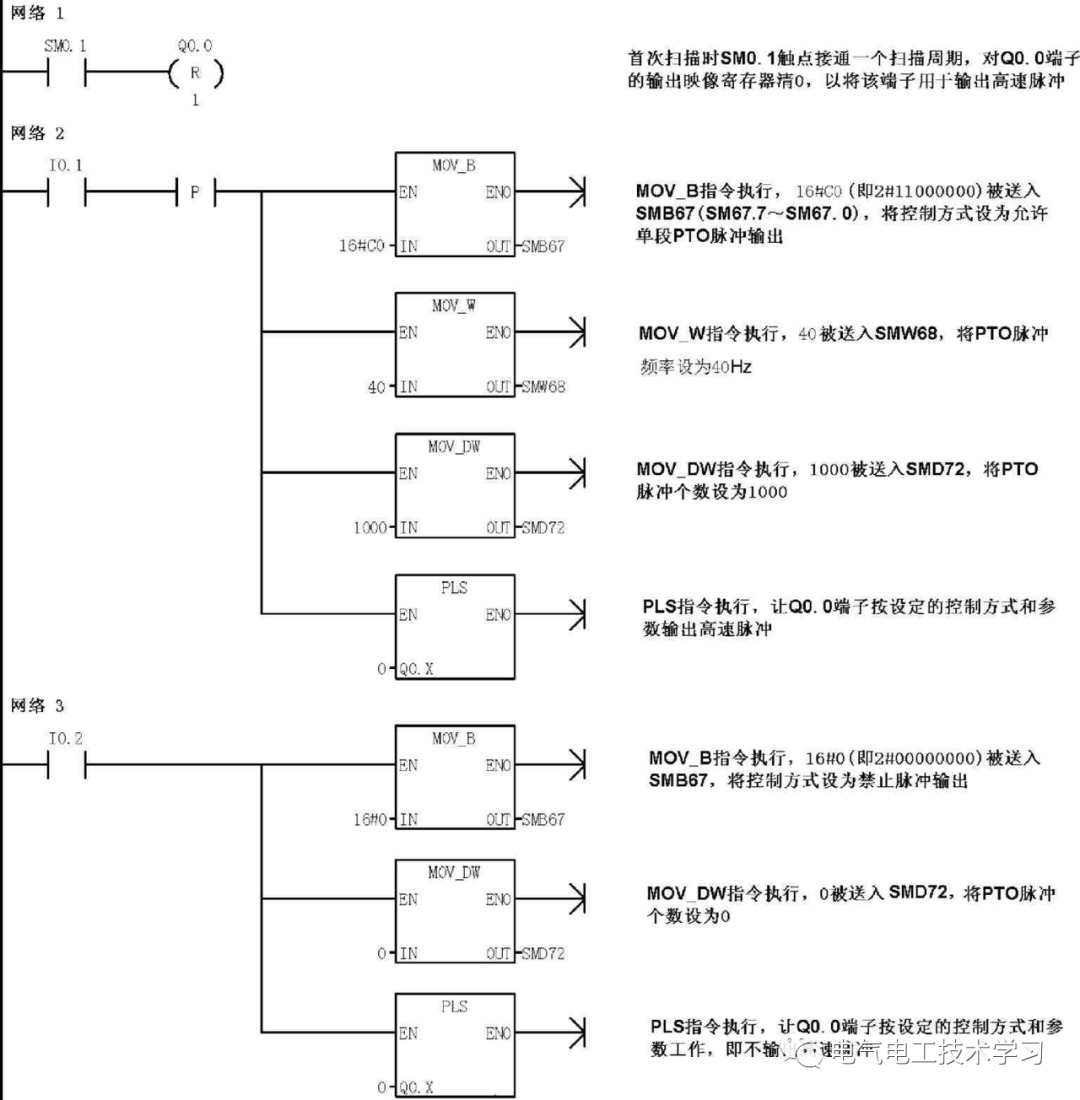
图1让Q0.0端子输出单段脉冲串的程序
1)参数设置包络表
由于多段脉冲串的各个脉冲串允许有较复杂的变化,无法用产生单段脉冲串的方法来输出多段脉冲串,S7-200 SMART PLC在变量存储区(V区)建立一个包络表,由该表来设置多段脉冲串中的各个脉冲串的参数。
表1 多段脉冲串参数设置包络表
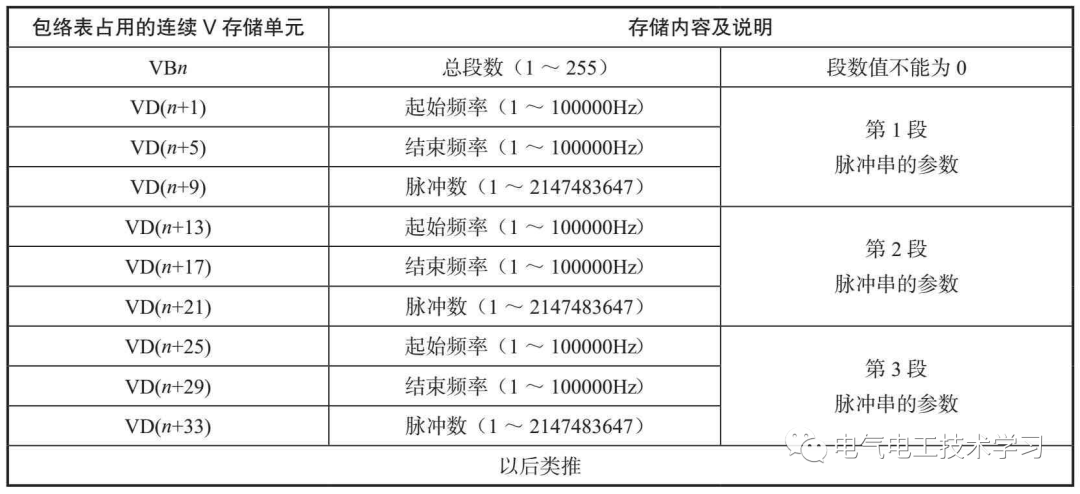
表1所示为多段脉冲串参数设置包络表。包络表的第1个字节单元VBn存放脉冲串的总段数,此后用3个连续的双字单元(每4个字节单元组成一个双字单元)分别存放一段脉冲串的起始频率、结束频率和脉冲数。在多段模式下,系统仍使用特殊存储器区的相应控制字节和状态位,每个脉冲串的参数则从包络表的变量存储器区读出。在多段编程时,必须将包络表的变量存储器起始地址(即包络表中的n值)装入SMW168(使用Q0.0端子输出脉冲时)、SMW178或SMW578。在运行时不能改变包络表中的内容,执行PLS指令来启动多段操作。
2)输出多段脉冲串的应用举例多段脉冲串常用于步进电动机的控制。图2所示是一个步进电动机的控制包络线,包络线分三段:第1段(AB段)为加速运行,电动机的起始频率为2kHz,终止频率为10kHz,要求运行脉冲数目为200个;第2段(BC段)为恒速运行,电动机的起始和终止频率均为10kHz,要求运行脉冲数目为3400个;第3段(CD段)为减速运行,电动机的起始频率为10kHz,终止频率为2kHz,要求运行脉冲数目为400个。
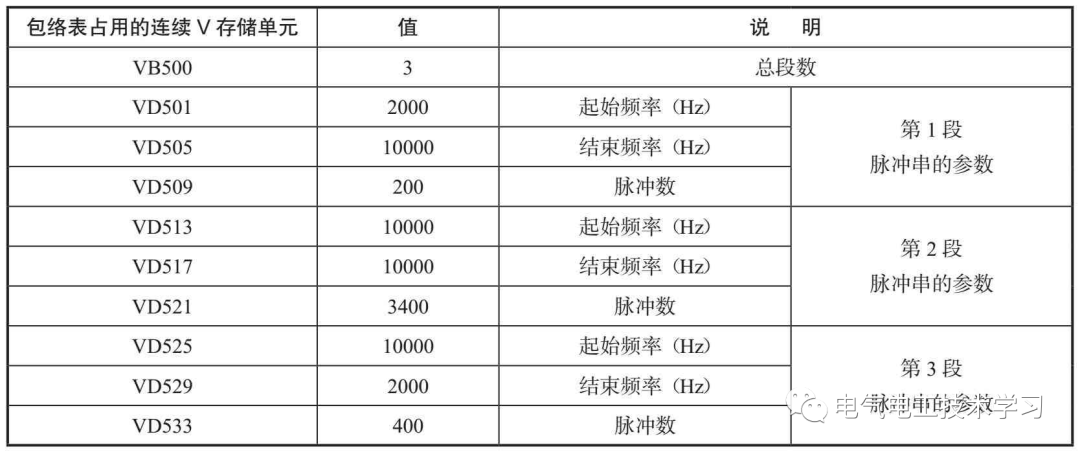
根据步进电动机的控制包络线可列出相应的包络表,如表2所示。
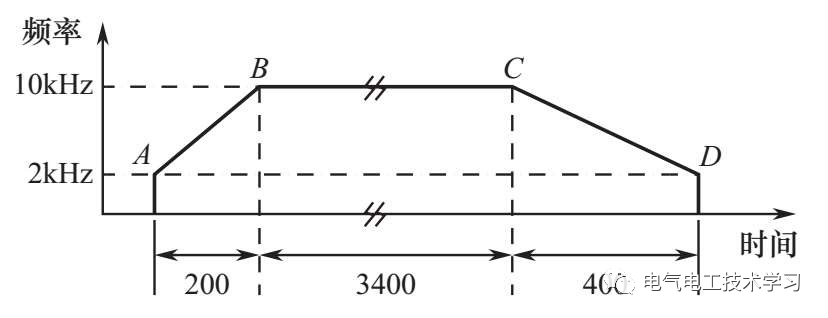
图2 一个步进电动机的控制包络线
表2 根据步进电动机的控制包络线列出的包络表
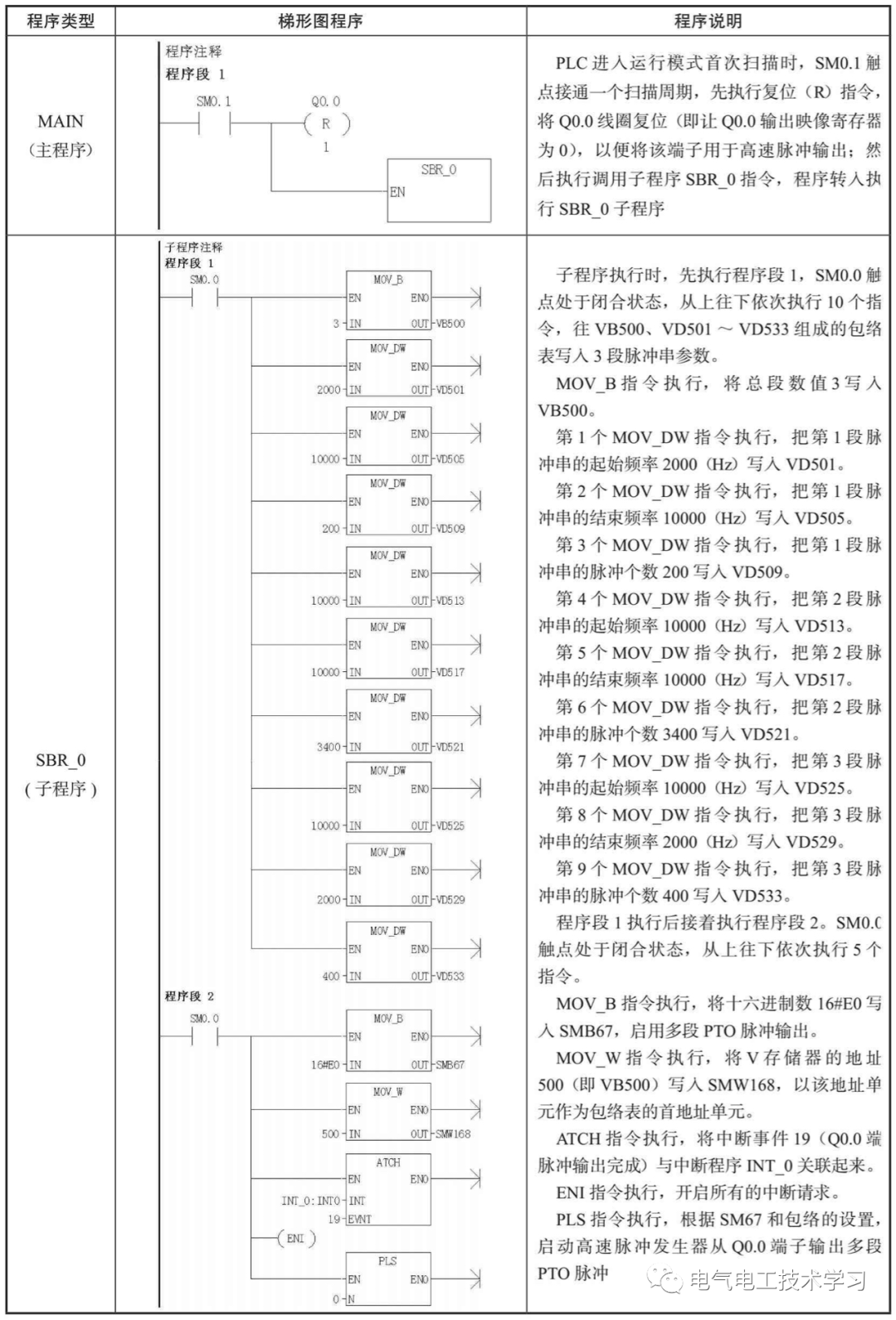
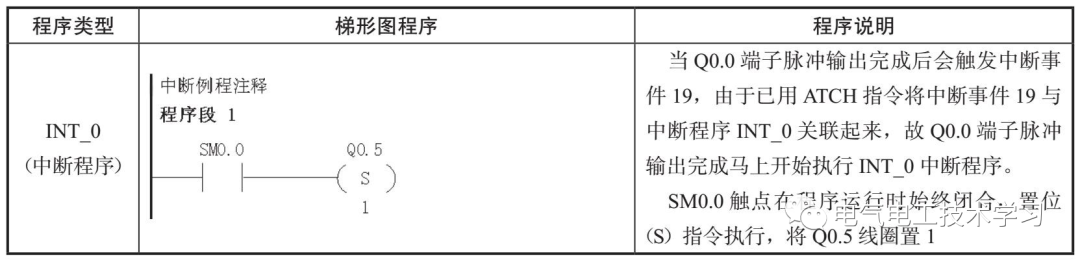
根据包络表可编写出步进电动机的控制程序,如表3所示,该程序由主程序、SBR_0子程序和INT_0中断程序组成。
表3产生多段脉冲串的程序(用于控制步进电动机)及说明
审核编辑:刘清
-
面向工业应用并且采用 PRU-ICSS 的高性能脉冲序列输出 (PTO)2015-04-28 2716
-
英飞凌MEMTOOL软件介绍和使用方法2018-12-14 41129
-
采用Sitara处理器PRU-ICSS的高性能脉冲序列输出 (PTO)2018-12-17 2942
-
介绍示波器的特殊使用方法2021-05-06 2763
-
介绍SPI的使用方法2022-02-17 1187
-
脉冲波形的产生和整形2009-09-16 3148
-
脉冲波形的产生与变换2009-12-09 1084
-
脉冲电源脉冲序列产生的一种方法2009-10-16 3198
-
什么是PTO2010-02-23 2292
-
脉冲信号怎么产生2018-08-21 47550
-
面包板的结构和使用方法详细介绍2018-10-31 136817
-
示波器的使用方法(三):示波器的使用方法详解2020-12-24 4902
-
脉冲发生器工作原理 脉冲信号怎么产生?产生脉冲信号的方法2023-08-24 11855
-
脉冲干扰的产生 脉冲干扰的解决方法2024-01-05 7095
-
产生脉冲信号有几种方法2024-07-15 5321
全部0条评论

快来发表一下你的评论吧 !
