

如何优化内部物流以简化和加速工业 4.0 供应链运行 - 第 2/2 部分
描述
作者:Jeff Shepard
投稿人:DigiKey 北美编辑
本系列关于内部物流的文章[ 第 1 部分 ]讨论了如何在系统层面使用自主移动机器人 (AMR) 和自动引导车辆 (AGV) 来实施内部物流,并根据需要快速、安全地移动材料等相关问题。本文重点介绍使用案例,以及 AMR 和 AGV 如何利用传感器识别和跟踪物品,机器学习 (ML) 和人工智能 (AI) 如何在整个仓库和生产设施中支持材料识别、移动和交付。
内部物流利用自主移动机器人 (AMR) 和自动引导车辆 (AGV) 在工业 4.0 仓库和生产设施中高效移动材料。为了简化和加快供应链运行,内部物流系统需要知道材料的当前位置、材料的预定目的地,以及材料到达目的地的最安全、最高效路径。这种流线型导航需要多种传感器。
在内部物流解决方案中,AGV 和 AMR 利用传感器来增强情景感知能力。传感器阵列可保障附近人员的安全、保护其他设备,并实现高效导航和定位。根据不同的应用需求,AMR 的传感器技术可包括接触式传感器(如内置在保险杠中的限位开关)、2D 和 3D 光探测和测距 (LiDAR)、超声波、2D 和立体相机、雷达、编码器、惯性测量装置 (IMU) 以及光电池。对于 AGV,传感器可包括磁性、电感式或光学线路传感器,以及内置在保险杠中的限位开关、2D LiDAR 和编码器。
本系列的第一篇文章介绍了如何在系统层面使用 AMR 和 AGV 来实施内部物流并根据需要高效移动材料。
本文重点介绍传感器融合,以及 AMR 和 AGV 如何将传感器与 AI 和 ML 结合使用,以实现定位、导航和操作安全。文中首先简要回顾了 AGV 中常见的传感器,研究了使用传感器融合的机器人姿态及同步定位和映射 (SLAM) 算法,探讨了如何利用扫描到地图匹配和扫描到扫描匹配技术改进 SLAM 估计值,最后介绍了传感器融合如何促进 AMR 和 AGV 的安全运行。DigiKey 为设计人员提供各种[传感器和开关],适用于所有这些情况下的机器人和其他工业应用。
为支持 AMR 的自主运行和安全性,需要一系列传感器和传感器融合、AI、ML 及无线连接。虽然对 AGV 的性能要求不高,但 AGV 仍然依赖多个传感器来支持安全和高效运行。传感器分为两大类:
- 本体感应传感器,可测量机器人内部的数值,如轮速、负载、电池电量等。
- 外部感应传感器,可提供有关机器人所处环境的信息,如距离测量、地标位置和障碍物识别(如进入机器人路径的人员)。
AGV 和 AMR 中的传感器融合依赖于本体感应和外部感应传感器的组合。AMR 中传感器的示例包括(图 1):
- 用于物体探测的激光扫描仪,探测距离超过 20 m
- 带有 6 轴陀螺仪和加速计的 IMU,有时还包含磁力计
- 车轮上的编码器,分辨率以 mm 计
- 接触式传感器,如保险杠上的微动开关,可在接触到意外物体时立即停止运动
- 两个前视 3D 摄像头,拍摄范围 4 m
- 下视传感器,用于检测平台边缘(称为悬崖检测)
- 用于提供连接的通信模块,并可选择提供用于实时定位服务 (RTLS) 的蓝牙到达角 (AoA) 和出发角 (AoD) 感测,或 5G 发射点/接收点 (TRP),以厘米级精度绘制网格图
- 2D LiDAR,可计算车辆前方的障碍物距离
- 广角 3D 深度视觉系统,适合物体识别和定位
- 板载高性能计算处理器,用于传感器融合、AI 和 ML
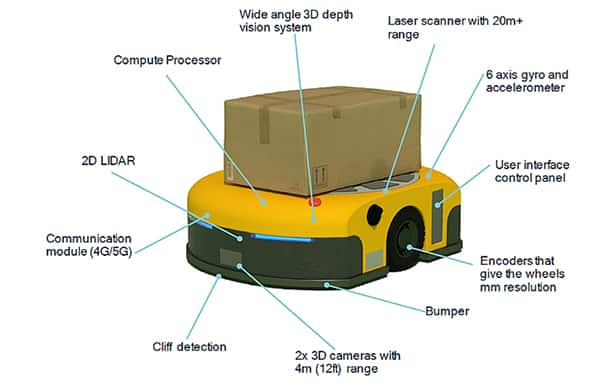 图 1:显示嵌入式传感器的多样性和位置的示例 AMR。(图片来源:Qualcomm)
图 1:显示嵌入式传感器的多样性和位置的示例 AMR。(图片来源:Qualcomm)
机器人姿态和传感器融合
AMR 导航是一个复杂的过程。第一步是让 AMR 知道自己的位置和方向。这些数据的组合称为机器人姿态。姿态的概念也适用于多轴固定式机器人的手臂和末端执行器。传感器融合将来自 IMU、编码器和其他传感器的输入相结合,以确定姿态。姿态算法可以估算出机器人的 (x, y) 位置以及相对于坐标轴的方位角 θ。函数 q = (x, y, θ) 定义了机器人的姿态。对于 AMR 而言,姿态信息有多种用途,包括:
- 入侵者(如靠近机器人的人员)相对于外部参照系或相对于机器人的姿态
- 机器人以给定速度运动一段时间后的估计姿态
- 计算机器人从当前姿态移动到下一姿态所需的速度曲线
在一些机器人软件开发环境中,姿态是一种预定义功能。例如,机器人操作系统 (ROS) 中就包含了 robot_pose_ekf 软件包,前者是一个开源开发平台。Robot_pose_ekf 可用于根据来自各种传感器的(部分)姿态测量值估算机器人的 3D 姿态。其使用扩展 Kalman 滤波器和 6D 模型(3D 位置和 3D 方向),将编码器(用于车轮里程测量)、摄像头(用于视觉里程测量)和 IMU 的测量结果相结合。由于各种传感器的运行速度和延迟时间各不相同,因此 robot_pose_ekf 并不要求所有传感器数据都能连续或同时提供。每个传感器用于提供一个带有协方差的姿态估计值。Robot_pose-ekf 可识别任何时间点的可用传感器信息,并做出相应调整。
传感器融合和 SLAM
运行 AMR 的许多环境中都有时常移动的可变障碍物。虽然设施的基础地图很有用,但还需要更多。在工业设施内移动时,AMR 需要的不仅仅是姿态信息,还需要利用 SLAM 来确保高效运行。SLAM 增加了实时环境映射功能,以支持导航。两种基本 SLAM 方法是:
- 视觉 SLAM,将摄像头与 IMU 配对
- LiDAR SLAM,将 2D 或 3D LiDAR 等激光传感器与 IMU 相结合
LiDAR SLAM 比视觉 SLAM 更精确,但实施成本通常更高。另外,还可利用 5G 来提供定位信息,以改善视觉 SLAM 估计值。在仓库和工厂中使用专用 5G 网络可以增强 SLAM 的嵌入式传感器。一些 AMR 利用 5G 发送点/接收点 (TRP) 实现室内精确定位,在 x、y 和 z 轴上绘制出厘米级精度的网格。
成功的导航依赖于 AMR 适应不断变化的环境因素的能力。导航结合了视觉 SLAM 和/或 LiDAR SLAM、5G TRP 等叠加技术以及 ML,以检测环境变化并提供持续的位置更新。传感器融合从多个方面支持 SLAM:
- 利用 AI 和 ML,根据各种传感器的输入,持续更新环境的空间和语义模型
- 识别障碍物,从而使路径规划算法能够进行必要的调整,并在环境中找到最有效的路径
- 实施路径计划需要实时控制,以根据环境变化改变计划路径,包括 AMR 的速度和方向
当 SLAM 还不够时
SLAM 是实现高效 AMR 导航的重要工具,但仅靠 SLAM 还不够。与姿态算法一样,SLAM 也是通过提供估计值的扩展 Kalman 滤波器来实现。SLAM 估计值扩展了姿态数据,增加了线性和旋转速度以及线性加速度等。SLAM 估算过程分为两步:第一步是根据物理运动规律,利用内部传感器分析进行预测。SLAM 估算的第二步需要外部传感器读数来完善初步估计值。这两步有助于消除和纠正小错误,否则这些小错误可能会随着时间的推移而产生重大错误。
SLAM 依赖于传感器输入的可用性。在某些情况下,成本相对较低的 2D LiDAR 可能无法工作,例如在传感器的直接视线范围内没有物体。在这种情况下,3D 立体相机或 3D LiDAR 可以提高系统性能。不过,3D 立体相机或 3D LiDAR 的成本较高,而且需要更强的计算能力才能实现。
另一种方法是使用导航系统,该系统将 SLAM 与扫描到地图匹配和扫描到扫描匹配技术相结合,仅使用 2D LiDAR 传感器即可实现(图 2):
- 扫描到地图匹配使用 LiDAR 测距数据,通过将测距测量结果与存储的地图进行匹配来估计 AMR 的位置。这种方法的有效性取决于地图的准确性。其不会随时间的推移而发生漂移,但在重复性环境中,它可能会导致难以识别的错误,引起感知位置的不连续变化,并且难以消除。
- 扫描到扫描匹配利用连续的 LiDAR 测距数据来估计两次扫描之间 AMR 的位置。这种方法可为 AMR 提供独立于任何现有地图的最新位置和姿态信息,在创建地图时非常有用。然而,这是一种增量算法,随着时间的推移可能会发生漂移,而且无法识别漂移带来的不准确性。
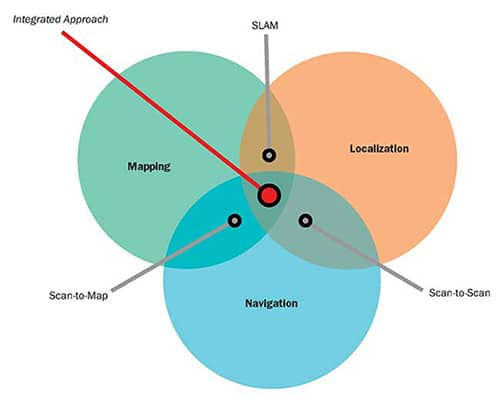 图 2:扫描到地图和扫描到扫描匹配算法可用于补充和提高 SLAM 系统的性能。(图片来源:Aethon)
图 2:扫描到地图和扫描到扫描匹配算法可用于补充和提高 SLAM 系统的性能。(图片来源:Aethon)
安全性需要传感器融合
安全性是 AGV 和 AMR 的关键问题,必须符合多项标准。例如,美国国家标准协会/工业车辆标准化发展基金会 (ANSI/ITSDF) B56.5-2019《无人驾驶、自动引导工业车辆和有人驾驶工业车辆自动功能安全标准》、美国国家标准协会/机器人工业协会 (RIA) R15.08-1-2020《工业移动机器人标准 – 安全要求》、若干国际标准化组织 (ISO) 标准等。
AGV 和 AMR 的安全运行需要传感器融合,即将经过安全认证的 2D LiDAR 传感器(有时称为安全激光扫描仪)与车轮上的编码器相结合。2D LiDAR 同时支持两种探测距离,感应角可达 270°,并与编码器报告的车速相协调。当在较远的探测区域(根据传感器的不同,最远可达 20 m)检测到物体时,车辆可根据需要减速。如果物体进入行进路线中较近的探测区域,车辆就会停止行驶。
安全激光扫描仪通常以 4 台为一组,在车辆的每个角落各放置一台。它们可以作为一个整体运行,并与车辆上的安全控制器直接通信。扫描仪经认证可用于安全类别 3、性能等级 d (PLd) 和安全完整性等级 2 (SIL2) 的应用,其封装于 IP65 外壳中,适合大多数室外和室内应用(图 3)。扫描仪包括来自车轮的增量式编码器信息输入,以支持传感器融合。
 图 3:像这样的 2D LiDAR 传感器可与车轮上的编码器相结合,组成一个传感器融合系统,从而确保 AMR 和 AGV 的安全运行。(图片来源:Idec)
图 3:像这样的 2D LiDAR 传感器可与车轮上的编码器相结合,组成一个传感器融合系统,从而确保 AMR 和 AGV 的安全运行。(图片来源:Idec)
总结
内部物流为工业 4.0 仓库和工厂提供更快、更高效的供应链支持。AMR 和 AGV 是内部物流的重要工具,可及时、安全地将材料从一个地方运送到另一个地方。而支持各项 AMR 和 AGV 功能,包括确定姿态、计算 SLAM 数据、利用扫描到地图匹配和扫描到扫描匹配技术提高导航性能,以及确保整个设施内人员和物体的安全,则必需传感器融合。
-
如何优化内部物流以简化和加速工业 4.0 供应链运行 - 第 1/2 部分2024-01-01 2086
-
工业交换机与供应链网络的融合,优化智能供应链管理2023-12-27 1511
-
工业4.0:数字化供应链的三个方向2020-12-25 1410
-
物流供应链管理是什么,供应链物流管理系统的介绍2020-11-10 4690
-
RFID在物流和供应链中如何应用?2019-08-07 1803
-
RFID技术对供应链管理有什么影响2019-07-29 2352
-
供应链领袖聚首:工业4.0生态系统如何构建?2019-07-02 2955
-
工业4.0如何塑造供应链2019-06-26 4179
-
智能制造和工业4.0如何塑造供应链?2019-06-24 4788
-
区块链将改革供应链2018-08-08 3863
-
手机供应链管理2014-11-24 5199
-
基于电子商务的供应链金融研究2012-10-25 2801
-
华为的研发流程和供应链管理2012-02-02 14466
-
供应链成本管理将是2012年企业关注的一大热点2011-12-19 3141
全部0条评论

快来发表一下你的评论吧 !
