

功率放大器在电磁系统中的应用
描述
针对电机在驱动微操作手上存在的问题,本文提出直接利用磁场力来驱动微操作手,通过功率放大器为磁驱系统提供稳定的电压,微操作手在磁场的作用下可以实现直线运动以及线性振动等运动,实现对微目标的抓取、运输、释放以及组装等操作。
测试设备:
ATA-3090B功率放大器,信号发生器等。
实验过程:
磁场驱动微操作手相对运动的抓取和基于振动的主动释放操作。
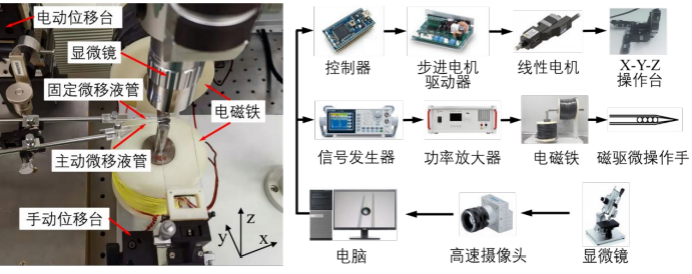 实验系统图
实验系统图
设置初始值,通过电动工作台将微球定位在两个微移液管中间;调节功率放大器增加输入电磁系统的电压,使主动末端向 Y 轴正方向运动来使两个微操作手末端夹紧微珠;通过电动工作台将两个微移液管连同夹住的微珠运输到目标位置,使主动末端沿着 Y 轴负方向移动来张开双指释放微球。
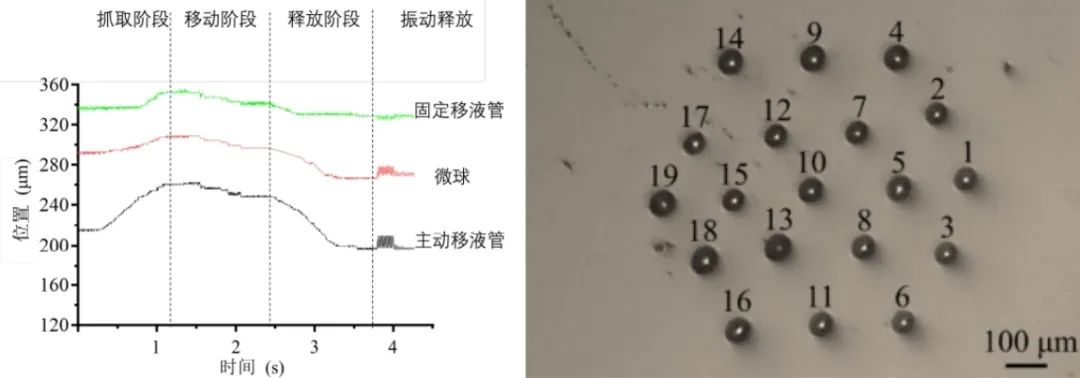
实验结果:
磁驱微操作手可以对不同大小的微球进行抓取,并且对黏附在末端的目标成功释放,最后成功组装成二维图形。另外,磁驱微操作手在稳定性、效率以及精度上展现出优势。
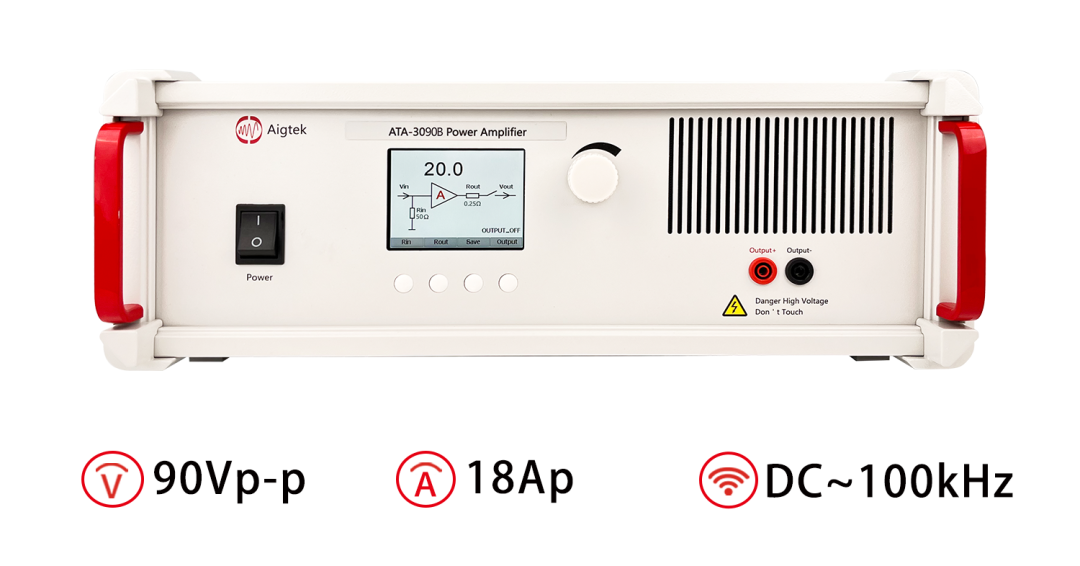
实验中所用到的功率放大器ATA-3090B指标参数:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
线性功率放大器设计和乙类和丙类功率放大器设计2008-08-17 9680
-
功率放大器的性能指标,功率放大器的应用2017-05-12 4229
-
波形功率放大器的原理与应用2017-06-21 4924
-
功率放大器类型有哪些?功率放大器如何选择厂家2017-10-17 4474
-
功率放大器,超声功率放大器定义分类和应用2017-12-15 5917
-
Aigtek功率放大器驱动交变电磁线圈的方法设计2020-02-13 2270
-
功率放大器在电磁兼容实验亥姆霍兹线圈设计中的应用2020-02-20 3748
-
功率放大器的设计资料分享2021-11-11 3232
-
RF功率放大器的设计2021-12-22 12842
-
功率放大器如何工作的?功率放大器类别和主要指标2023-02-14 1693
-
一文解读功率放大器(功率放大器如何选型)2022-11-15 4618
-
功率放大器有哪些类型,功率放大器选型原则2023-07-25 4465
-
功率放大器在电磁系统中的应用2024-08-13 1307
-
Aigtek功率放大器在电磁系统中的应用2025-04-16 740
-
功率放大器在电磁测试中的应用有哪些2026-01-14 398
全部0条评论

快来发表一下你的评论吧 !
