

通过CANopen转Modbus TCP网关的伺服系统
描述
通过CANopen转Modbus TCP网关的伺服系统,我们能够实现CANopen协议与Modbus TCP协议之间的无缝转换,从而为伺服电机的通讯和控制带来更大的便利和灵活性。
首先我们可以通过CANopen协议与伺服电机进行通讯。CANopen协议是一种先进的、高效的通讯协议,它基于CAN总线技术,能够实现设备之间的快速、稳定通讯。在CANopen协议中,从站设备需要配置控制字、速度、模式等参数,主站设备可以通过发送控制指令来精确控制从站设备的运转。
然后,我们可以通过Modbus TCP协议与网关进行通讯。Modbus TCP协议是一种广泛应用的工业自动化通讯协议,它基于TCPIP网络协议,可以实现设备之间的远程通讯和控制。在Modbus TCP协议中,从站设备需要配置IP地址、端口号等参数,主站设备可以通过发送Modbus指令来读写从站设备的寄存器,从而实现对从站设备的精确控制。
通过CANopen转Modbus TCP网关,我们能够实现CANopen协议与Modbus TCP协议之间的转换。网关可以配置为CANopen从站和Modbus主站,从而与伺服电机进行通讯和控制。在网关的配置软件中,我们可以设置CANopen从站的参数和Modbus主站的参数,包括波特率、奇偶校验、数据位、停止位、站地址等。同时,我们还可以手动修改寄存器起始地址,实现不同伺服电机的控制。
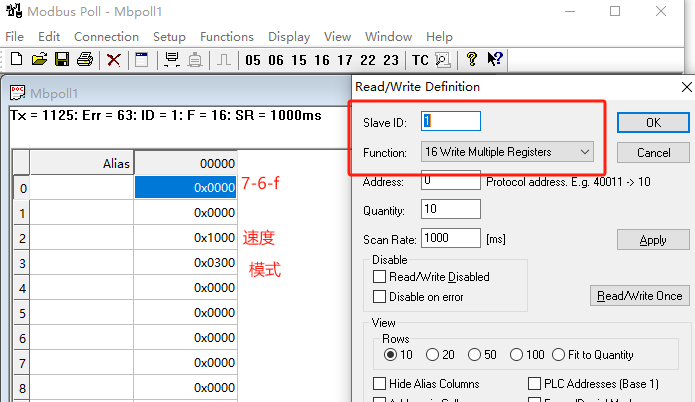
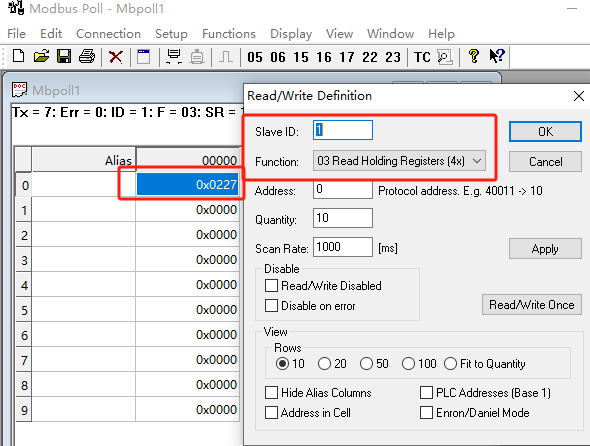
使用Modbus主站软件可以读写从站设备的参数。在Modbus主站软件中,我们可以发送Modbus指令来读写从站设备的寄存器,从而实现对伺服电机的精确控制。例如,图1是用modbuspoll通过对伺服读取电机的状态字;图2给伺服下入,功能码为16(写入多寄存器)第一个寄存器是控制字依次写入写入7-6-F,第二、三寄存器是速度值,第四寄存器是模式选择写入0300。这样,当伺服电机在使能后即可按照输入速度运转。总的来说,通过CANopen转Modbus TCP网关的伺服系统,我们能够实现伺服电机的高效通讯和控制。这种系统具有很高的实用性和灵活性,能够满足各种工业自动化应用的需求。
-
开疆智能CANopen转CCLinkIE网关连接埃斯顿伺服系统配置案例2025-07-05 979
-
包装机械薄膜张力稳了!CAN转Modbus TCP网关让西门子PLC与伺服“默契配合”2025-07-02 790
-
CANOpen转PROFINET网关连接低压伺服系统2025-03-24 1313
-
三格电子Modbus TCP转CANOpen网关相关问答2025-03-13 1100
-
三格电子-MODBUS TCP转CANOpen网关2024-11-26 1027
-
MODBUS TCP 转 CANOpen2024-09-24 1064
-
通过CANopen转Modbus TCP网关的伺服系统2024-01-02 1227
-
ModbusTCP转CANopen网关在楼宇消防中的应用2023-12-25 1094
-
CANopen转Modbus TCP网关应用在风能发电厂大型变频器2023-12-20 1534
-
ModbusTCP转CanOpen网关助力工控行业2023-12-11 3458
-
通过Profinet转Modbus TCP网关集中采集电源能耗2023-08-24 974
-
modbus TCP转CANopen网关是什么2022-06-30 1726
-
开疆智能canopen转modbus网关配置手册2021-11-22 3125
全部0条评论

快来发表一下你的评论吧 !
