

分析 丨人形机器人需要什么样的BLDC电机控制芯片?
电子说
描述
12月13日马斯克发布了新一代人形机器人原型Optimus Gen 2,距离量产又近了一步。我国也在加速发展人形机器人,近期,工信部印发《人形机器人创新发展指导意见》,指出人形机器人有望成为继计算机、智能手机、新能源汽车后的颠覆性产品,并且明确了人形机器人发展的目标与时间点。
目前,我国人形机器人产业链中游的本土制造厂商不在少数,包括优必选、达闼科技、小米、腾讯、傅利叶智能、小鹏汽车、追觅、宇树、智元机器人等,其中只有优必选推出量产化产品,但成本昂贵。上游核心零部件厂商包括无框力矩电机厂商步科股份,空心杯电机厂商鸣志电器,减速器厂商绿的谐波、中大力德、双环传动,控制系统厂商汇川技术,编码器与传感器厂商昊志机电,行星滚柱丝杠厂商长盛轴承、秦川机床等。(备注:无框表示电机无外壳;空心杯表示电机没有铁芯转子)
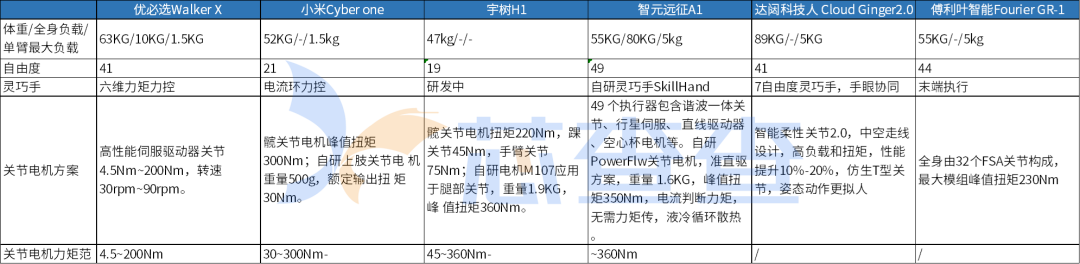
图注:国内几家主要人形机器人的关节电机对比(不完全统计,芯查查制表)无框力矩电机、空心杯电机是机器人关节的关键部件,相比这2种电机,无刷直流电机(下文BLDC)是更广义、普遍的电机类型,有分析认为常见的人形机器人关节电机属于BLDC。
BLDC并不是新鲜事物,其几乎无处不在,家用电器、办公设备、电动工具、汽车电子系统等不胜枚举,而诸如无人机、电动汽车,以及上述的机器人等新兴应用也离不开BLDC。Allied Market Research估计,到2030年全球BLDC市场规模将从2020年的332亿美元增长到722亿美元。
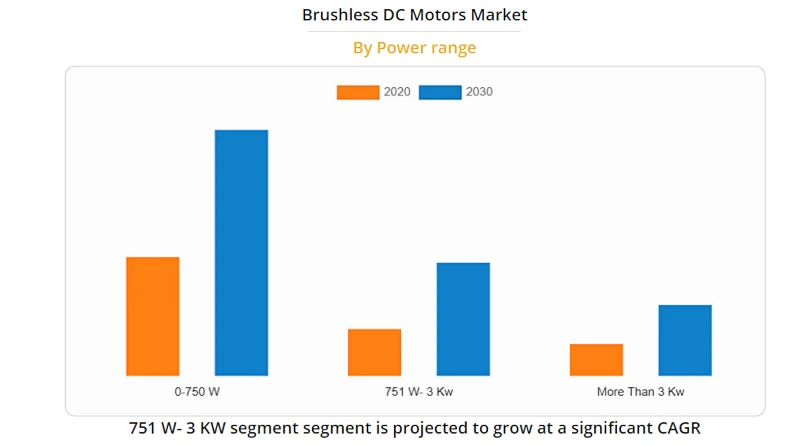
图注:2020-2030年BLDC电机的增长(图源:Allied Market Research)
BLDC优势包括能效高(通常高达92%);由于没有任何电刷摩擦,可以更高速度运行;尺寸更紧凑、噪声属性更低,EMI曲线更佳等。但这些优势也有代价,其控制的设计更加复杂,下面讲述BLDC控制芯片在应用中的几个趋势。
专用芯片,还是通用MCU?
BLDC电机控制可以使用专用芯片(ASSP),也可以使用通用MCU。
专用芯片通常集成电机控制所需的硬件模块,比如PWM控制器、电流感应、位置传感接口(通常是霍尔效应传感器或编码器接口)、以及保护电路等。专用芯片通常具有高效率、低功耗和小尺寸的优点,而且因为专门针对电机控制设计,往往提供优秀性能和稳定性。
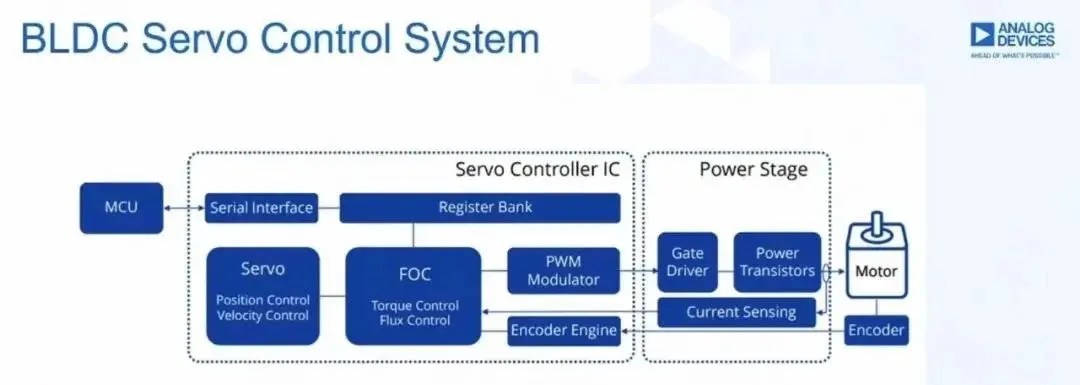
图注:BLDC电机控制系统(图源:中电港)
对于BLDC电机控制专用芯片,供应商通常提供了门类齐全的专用芯片产品组合,例如ADI提供的模数/数模转换器、放大器、嵌入式处理器、iCoupler®数字隔离器、电源管理器件和实时以太网解决方案。
在电机的伺服控制系统中,高精度电流和电压检测可提高速度和扭矩控制性能。使用电阻进行电流采样的伺服系统中,采样信号质量对电控制性能的影响至关重要,ADI提供基于Σ-Δ调制器的高性能解决方案。
位置检测性能是伺服控制的关键,常常使用光学编码器和旋转变压器作为位置传感器。伺服控制技术从模拟向数字的转换推动了现代伺服系统的发展,也满足了对于电机控制的性能和效率的高要求。
从优先考虑安全和保护的角度,信号采样和功率器件驱动应采用隔离技术。ADI的iCoupler数字隔离器产品可满足高压安全隔离要求。
相比专用芯片,基于通用MCU的BLDC电机控制有其优点——灵活、可编程。MCU通常包含一个或多个CPU核心以及各种外围接口和外设,通过软件编程实现电机控制算法。32位MCU具有足够处理能力实现复杂电机控制算法,比如磁场定向控制(FOC,Field Oriented Control)。
例如Microchip AVR EB系列MCU可在BLDC电机系统中提供复杂的波形控制,调整速度、时序和波形形状创建正弦波和梯形波形;片上外设只需极少编程即可实现多种功能,快速响应工作条件变化,可即时进行调整,延迟几乎为零。此外可以独立于CPU执行多项任务,例如读取环境传感器和串行通信,可降低整体BOM成本。
选择专用芯片还是通用MCU,取决于应用需求:
- 如果应用对成本敏感,且电机控制需求相对简单,专用芯片ASSP可能是一个更好选择,因为具有较低成本和较高集成度。- 如果应用需要更高灵活性、可扩展性或者需要执行复杂任务,那么通用MCU可能更适合。虽然初始开发成本较高,但MCU的灵活性可以适应未来设计变更和功能升级。
在实际应用中,设计可能会结合专用电机控制芯片和通用MCU,各司其职,专用芯片处理电机控制的特定任务,MCU负责更高层次的系统控制和通信功能,这种混合方案可以兼顾性能、成本和灵活性。
无传感器或更加普遍,控制算法硬件化
无传感器的BLDC电机或许会更加普遍,这就需要通过控制算法实现电机运行状态的监测和控制。
从性能和复杂度来看,电机控制算法发展路线从最初的120度方波控制,到有感SVPWM、逐步发展到有感FOC、最后到无感FOC控制算法——控制算法越来越复杂,开发门槛越来越高。为了便于用户使用最新和最优控制方案,电机控制算法通过硬件化降低开发门槛是必然趋势。
早期的MCU纯软件算法开发方式,迅速被智能集成的硬件化替代,从方波算法ASIC化、类正弦算法ASIC化、集成MDU、Cordic等,到最后无感FOC算法ASIC化等一系列的变化,实现电机控制算法硬件化的演变。
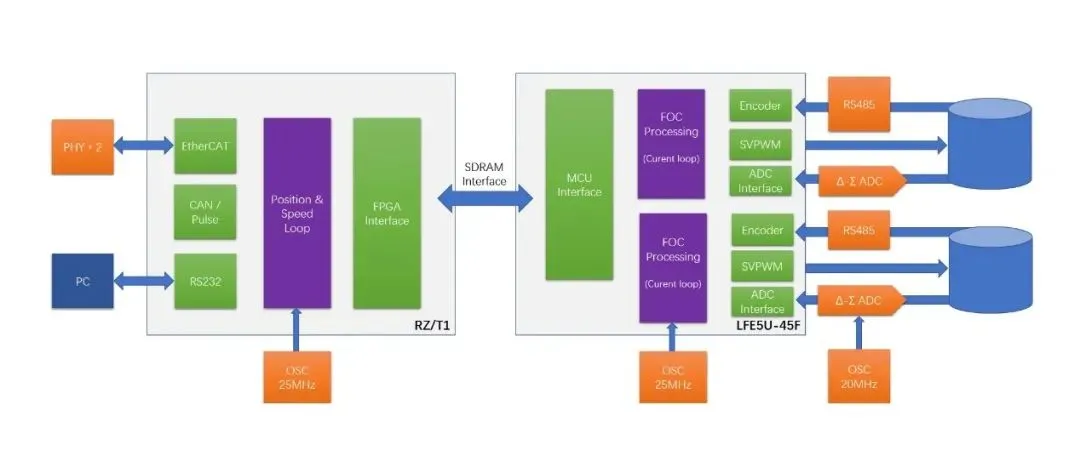
图注:Renesas MPU+Lattice FPGA双芯片架构,在实现算法加速的同时支持EtherCAT开放架构(图源:中电港)
除了ASIC,FPGA也被用于实现FOC控制算法,例如中电港联合全球知名半导体解决方案供应商瑞萨电子及莱迪思半导体推出高性能EtherCAT伺服驱动解决方案,采用Renesas MPU+Lattice FPGA双芯片架构。
在这个方案中,电流环控制放在FPGA里进行硬件加速,大幅降低延时,让电流环更快速,提高精确度。FPGA在实现多轴同步控制、电流环控制、PWM控制和输出等方面更具优势,此外,FPGA可灵活搭配不同型号,实现1-6轴电机控制,成本上更具优势。Renesas RZ/T1 MPU内部集成了EtherCAT硬核控制器,集成度更高,控制的实时性更好。
集成化趋势:整合预驱动、栅极驱动、电源管理等
高集成是BLDC电机控制芯片的另一个趋势,从完全分离、到集成运放和比较器、集成预驱动、集成电源和MOSFET、再到全集成模块。在人形机器人设计中,高度集成的芯片有助于实现小型化和轻量化。以安森美ecoSpin BLDC电机控制器系列为例,将控制和驱动器集成在一个芯片,简化HVAC、制冷和机器人等应用中高压电机控制系统的开发,该系列产品之一ECS640A集成6个栅极驱动器输出,为外部功率器件提供350mA/650mA(典型值)栅极电流灌/拉电流,霍尔传感器输入支持有传感器或无传感器操作。
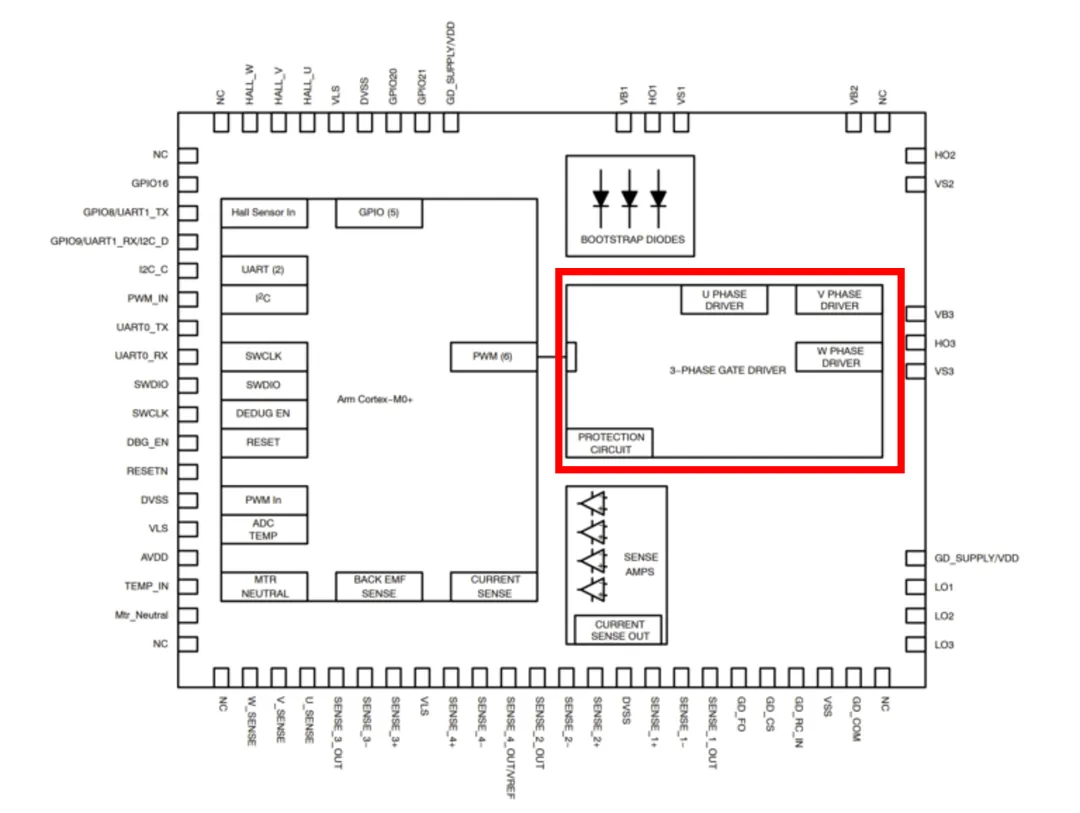
图注:BLDC电机控制MCU集成栅极驱动有助于简化人形机器人设计,图例安森美ecoSpin系列产品(图源:安森美)
小 结
人形机器人是当前高科技领域的热点应用之一,高精度动作控制和姿态调整要求其使用的电机具有极高的精度和动态响应能力,同时要求系统处理多个电机的控制任务,确保协调和同步,此外,人形机器人需要在有限的空间内集成大量的电子和机械组件,比如电机和控制器。综合来看,BLDC电机相比传统电机更符合上述人形机器人的需求,这势必带动BLDC电机控制芯片的发展,本文概括了这类芯片的产品和方案的应用。
审核编辑 黄宇
-
伺服电动缸在人形机器人中的应用2025-02-06 2244
-
SiLM2035EF-7G 200V半桥驱动器,如何以DFN2×2极小封装赋能人形机器人关节电机?2026-05-21 57
-
揭秘人形机器人成本构成:这三个核心零部件,决定了它能走多远2026-06-01 102
-
日本技术宅自制人形机器人——萌萌哒的初音未来2015-03-06 9031
-
为什么人形机器人更讨人喜欢?2016-05-12 5339
-
选择机器人电机的几点思考2019-03-12 4251
-
嵌入式行业需要什么样的技术人才?2021-11-08 1684
-
机甲大师机器人是什么样的?2021-11-22 2400
-
【开发教程1】人形街舞机器人-套件检测教程2022-04-22 4899
-
【教程1】人形街舞机器人-套件检测教程2022-08-12 9425
-
机器人编程需要什么软件?2023-11-01 830
-
用于机器人系统的BLDC需要高性能电机控制2022-08-10 1539
-
人形机器人电机用途2023-06-25 2859
-
人形机器人伺服电机应用概览2023-11-08 2064
-
主要人形机器人厂商的电机驱动与传感系统对比2025-05-09 3097
全部0条评论

快来发表一下你的评论吧 !
