

MM32F5270 UART实现LIN通信
描述
1►
LIN总线简介
LIN(Local Interconnect Network)总线是基于UART/SCI(通用异步收发器/串行接口)的低成本串行通讯协议,其目标定位于车身网络模块节点间的低端通信,主要用于智能传感器和执行器的串行通信。LIN总线采用单主多从的组网方式,没有CAN总线那样的仲裁机制,辅以简单驱动程序便可实现LIN协议。LIN节点由控制芯片和LIN收发器构成,一般通过芯片搭载的UART模块来实现,主节点控制传输时刻,控制整个网络的通信,从节点按照主节点的调度进行通信。
2►
LIN报文结构
LIN总线上有“显性”和“隐性”两种互补的逻辑电平。显性电平是逻辑 0,隐性电平是逻辑1,总线上实行“线与”。
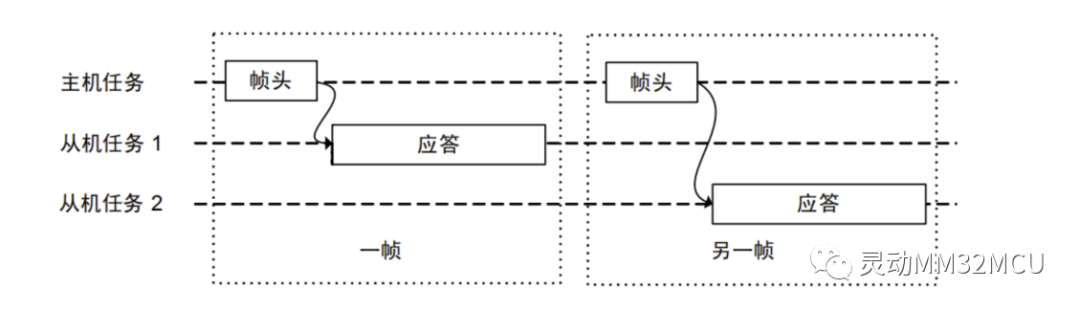
一帧LIN报文由帧头(Header)和应答(Response)两部分组成。主机任务负责发送帧头,从机任务接收帧头并对帧头所包含信息进行解析,然后决定是发送应答,还是接收应答,还是不作任何反应。帧在总线上的传输如下图所示:
帧头包括同步间隔段、同步段以及受保护ID段(PID)。应答包括数据段和校验和段。LIN报文帧整体结构如下图所示。
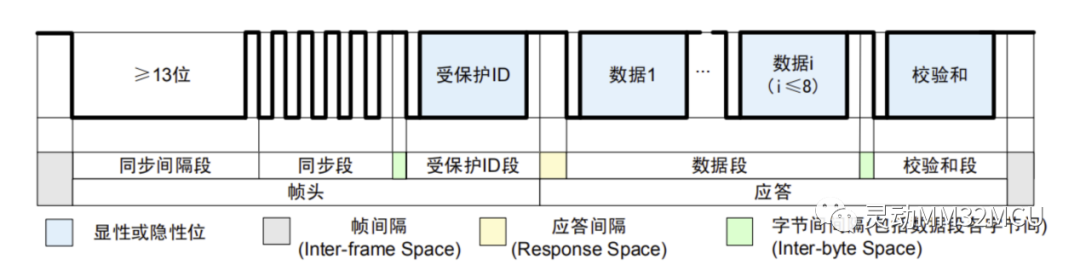
同步间隔段
同步间隔段标志一帧的开始,由同步间隔(Break)和间隔符(Break Delimiter)构成。同步间隔段至少有13个显性位,间隔符至少有一个隐形位。
同步段
同步段固定一个字节,值固定为0x55。
在LIN帧中,除了同步间隔段,后面各段都是通过字节域的格式传输的。LIN的字节域就是指标准的UART数据传输格式,字节域包括1位起始位(显性)+8位数据位+1位停止位(隐性)。数据传输都是先发送LSB,最后发送 MSB。LIN总线将下降沿作为判断标志,通过字节0x55(01010101b)进行同步,从机节点上可以采用非高精度时钟,如果存在偏差,可以通过同步场来调整,使从机节点数据的波特率与主机节点一致。
受保护ID段
受保护ID段由6位帧ID和2位奇偶校验位组成,帧ID范围为0x00~0x3F共64个。
帧ID标识了帧的类别,从机任务根据帧头ID作出反应(接收/发送/忽略应答),其中P0与P1效验如下:
P0 = ID0⊕ID1⊕ID2⊕ID4
P1 = ¬(ID1⊕ID3⊕ID4⊕ID5)
其中“⊕”代表“异或”运算,“¬”代表“取非”运算。
由公式可以看出,PID 不会出现全 0 或全 1 的情况,如果从机节点收到了“0xFF”或“0x00”,可判断传输错误。LIN总线根据帧ID的不同,将报文分为信号携带帧、诊断帧、保留帧。
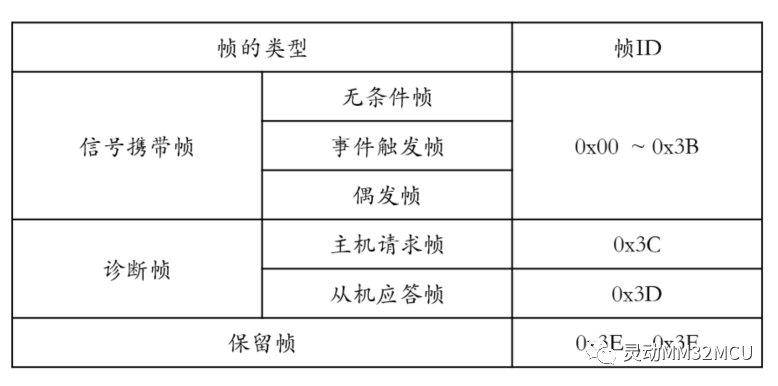
应注意从机应答帧是一个完整的帧,与帧结构中的“应答”不同。
数据段
数据段包含1~8个字节,可以分为两种数据类型:信号和诊断消息。信号由信号携带帧传递,诊断消息由诊断帧传递。LIN协议规定可传输的LIN字节数为2、4、8,并不是1~8内任意一个数字。一般应用方面会统一字节数,通常是每帧传输8个字节。
校验和段
校验和段是为了对帧传输内容进行效验。效验分为标准型校验与增强型校验。
将校验对象的各字节作带进位二进制加法(当结果大于等于256 时就减去255),并将所得最终的和逐位取反,以该结果作为要发送的校验和。接收方根据校验和类型,对接收数据作相同的带进位二进制加法,最终的和不取反,并将该和与接收到的校验和作加法,如果结果为0xFF,则校验和无误。这在一定程度上保证了数据传输的正确性。
采用标准型还是增强型是由主机节点管理,发布节点和收听节点根据帧ID来判断采用哪种校验和。

3►
LIN通信实验
MM32F5270的UART支持LIN协议下收发断开符号,通过配置UART,根据总线特征编写LIN驱动程序,实现LIN总线通信。相关代码参考灵动官网的LibSamples或在此基础上修改。
3.1 LIN驱动程序
同步间隔段
配置UART支持LIN协议下收发断开符号:
void LIN_MASTER_Break(void)
{
LIN_MASTER_TXBRK_InterruptFlag = 0;
UART_LINCmd(UART1, ENABLE);
UART_SendBreak(UART1);
while (0 == LIN_MASTER_TXBRK_InterruptFlag)
{
}
}
同步段
主机发送0x55:
void LIN_MASTER_SyncByte(void)
{
LIN_MASTER_SendData(0x55);
}
受保护ID段
uint8_t LIN_FrameIDToPID(uint8_t FrameID)
{
uint8_t i = 0;
uint8_t P0 = 0, P1 = 0, PID = 0xFF;
uint8_t ID_BIT[6] =
{
0, 0, 0, 0, 0, 0
};
if (FrameID < 0x40)
{
PID = FrameID;
for (i = 0; i < 6; i++)
{
if (FrameID & (0x01 << i))
{
ID_BIT[i] = 1;
}
else
{
ID_BIT[i] = 0;
}
}
P0 = (ID_BIT[0] ^ ID_BIT[1] ^ ID_BIT[2] ^ ID_BIT[4]) & 0x01;
P1 = ~(ID_BIT[1] ^ ID_BIT[3] ^ ID_BIT[4] ^ ID_BIT[5]) & 0x01;
if (P0)
{
PID |= 0x40;
}
if (P1)
{
PID |= 0x80;
}
}
return (PID);
}
数据段
主机发送数据:
void LIN_MASTER_SendData(uint8_t Data)
{
UART_SendData(UART1, Data);
while (RESET == UART_GetFlagStatus(UART1, UART_FLAG_TXC))
{
}
}
从机发送数据:
void LIN_SLAVE_SendData(uint8_t Data)
{
UART_SendData(UART1, Data);
while (RESET == UART_GetFlagStatus(UART1, UART_FLAG_TXC))
{
}
}
校验和段
标准型校验:
uint8_t LIN_ClassicChecksum(uint8_t *Buffer, uint8_t Length)
{
uint8_t i = 0;
uint16_t Checksum = 0;
for (i = 0; i < Length; i++)
{
Checksum += Buffer[i];
if (Checksum > 0xFF)
{
Checksum %= 0xFF;
}
}
return (~(uint8_t)(Checksum & 0x00FF));
}
增强型校验:
uint8_t LIN_EnhancedChecksum(uint8_t PID, uint8_t *Buffer, uint8_t Length)
{
uint8_t i = 0;
uint16_t Checksum = PID;
for (i = 0; i < Length; i++)
{
Checksum += Buffer[i];
if (Checksum > 0xFF)
{
Checksum %= 0xFF;
}
}
return (~(uint8_t)(Checksum & 0x00FF));
}
主机发送帧头
void LIN_MASTER_SendHeader(uint8_t PID)
{
LIN_MASTER_Break();
LIN_MASTER_SyncByte();
LIN_MASTER_SendData(PID);
}
主机发送报文
诊断帧ID包括主机请求帧0x3C、从机应答帧0x3D,诊断帧用标准型校验和,其他帧使用增强型校验和。
void LIN_Master_SendFrame(uint8_t FrameID, uint8_t *Buffer, uint8_t Length)
{
uint8_t i = 0;
uint8_t Checksum = 0;
uint8_t PID = LIN_FrameIDToPID(FrameID);
if ((0x3C == FrameID) || (0x3D == FrameID))
{
Checksum = LIN_ClassicChecksum(Buffer, Length);
}
else
{
Checksum = LIN_EnhancedChecksum(PID, Buffer, Length);
}
LIN_MASTER_SendHeader(PID);
for (i = 0; i < Length; i++)
{
LIN_MASTER_SendData(Buffer[i]);
}
LIN_MASTER_SendData(Checksum);
}
从机发布数据
从机解析帧头信息,将主机发送的PID得到帧ID,根据帧ID选择校验类型,发送数据段和校验和段。
void LIN_SLAVE_Response(uint8_t *Buffer, uint8_t Length)
{
uint8_t i = 0;
uint8_t Checksum = 0, FrameID = 0;
FrameID = LIN_PIDToFrameID(LIN_SLAVE_RxBuffer[1]);
Checksum = 0;
if ((0x3C == FrameID) || (0x3D == FrameID))
{
Checksum = LIN_ClassicChecksum(Buffer, Length);
}
else
{
Checksum = LIN_EnhancedChecksum(LIN_SLAVE_RxBuffer[1], Buffer, Length);
}
for (i = 0; i < Length; i++)
{
LIN_SLAVE_SendData(Buffer[i]);
}
LIN_SLAVE_SendData(Checksum);
}
3.2 主机程序
主机UART配置
void UART_Configure(uint32_t Baudrate)
{
GPIO_InitTypeDef GPIO_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
UART_InitTypeDef UART_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_UART1, ENABLE);
UART_StructInit(&UART_InitStruct);
UART_InitStruct.BaudRate = Baudrate;
UART_InitStruct.WordLength = UART_WordLength_8b;
UART_InitStruct.StopBits = UART_StopBits_1;
UART_InitStruct.Parity = UART_Parity_No;
UART_InitStruct.HWFlowControl = UART_HWFlowControl_None;
UART_InitStruct.Mode = UART_Mode_Rx | UART_Mode_Tx;
UART_Init(UART1, &UART_InitStruct);
UART_IDLRConfig(UART1, 100); /* LIN Master Only!!! */
UART_ITConfig(UART1, UART_IT_RX, ENABLE);
UART_ITConfig(UART1, UART_IT_TXBRK, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_7);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_7);
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_High;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStruct);
NVIC_InitStruct.NVIC_IRQChannel = UART1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
UART_Cmd(UART1, ENABLE);
}
主机中断服务子程序
void UART1_IRQHandler(void)
{
uint8_t i = 0;
if(SET == UART_GetITStatus(UART1, UART_IT_TXBRK))
{
UART1_RxLength = 0;
UART_ClearITPendingBit(UART1, UART_IT_TXBRK);
UART_ITConfig(UART1, UART_IT_RXIDLE, ENABLE);
LIN_MASTER_TXBRK_InterruptFlag = 1;
}
if(SET == UART_GetITStatus(UART1, UART_IT_RX))
{
UART1_RxBuffer[UART1_RxLength] = UART1->RDR & 0x00FF;
UART1_RxLength = (UART1_RxLength + 1) % 100;
UART_ClearITPendingBit(UART1, UART_IT_RX);
}
if(SET == UART_GetITStatus(UART1, UART_IT_RXIDLE))
{
for(i= 0; i < UART1_RxLength; i++)
{
LIN_MASTER_RxBuffer[i] = UART1_RxBuffer[i];
}
LIN_MASTER_RxLength = UART1_RxLength;
LIN_MASTER_RxFinish = 1;
UART_ClearITPendingBit(UART1, UART_IT_RXIDLE);
UART_ITConfig(UART1, UART_IT_RXIDLE, DISABLE);
}
}
主机例程
主机间隔500ms发布和接收数据,发送帧ID和数据依次累加:
void UART_LIN_Master_Sample(void)
{
uint8_t i = 0;
uint8_t FrameID = 0, Mode = 0;
uint8_t Buffer[2] = { 0, 0 };
printf("
Test %s", __FUNCTION__);
LIN_MASTER_RxLength = 0;
LIN_MASTER_RxFinish = 0;
for (i = 0; i < 100; i++)
{
LIN_MASTER_RxBuffer[i] = 0;
}
UART_Configure(19200);
while (1)
{
if (Mode == 0)
{
printf("
LIN Master Write...");
LIN_Master_SendFrame(FrameID, Buffer, sizeof(Buffer));
}
else
{
printf("
LIN Master Read....");
LIN_MASTER_SendHeader(LIN_FrameIDToPID(FrameID));
while (0 == LIN_MASTER_RxFinish)
{
}
LIN_MASTER_RxFinish = 0;
printf("
LIN Master Rx Length : %d, Rx Buffer : ", LIN_MASTER_RxLength);
for (i = 0; i < LIN_MASTER_RxLength; i++)
{
printf("0x%02x ", LIN_MASTER_RxBuffer[i]);
}
printf("
");
for (i = 0; i < sizeof(Buffer); i++)
{
Buffer[i]++;
}
FrameID = (FrameID + 1) % 0x40;
}
Mode = (0 == Mode) ? 1 : 0;
PLATFORM_DelayMS(500);
}
}
3.3 从机程序
从机UART配置
使能UART LIN总线模式、使能UART接收断开帧中断、使能接收单字节中断。
void UART_Configure(uint32_t Baudrate)
{
GPIO_InitTypeDef GPIO_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
UART_InitTypeDef UART_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_UART1, ENABLE);
UART_StructInit(&UART_InitStruct);
UART_InitStruct.BaudRate = Baudrate;
UART_InitStruct.WordLength = UART_WordLength_8b;
UART_InitStruct.StopBits = UART_StopBits_1;
UART_InitStruct.Parity = UART_Parity_No;
UART_InitStruct.HWFlowControl = UART_HWFlowControl_None;
UART_InitStruct.Mode = UART_Mode_Rx | UART_Mode_Tx;
UART_Init(UART1, &UART_InitStruct);
UART_LINCmd(UART1, ENABLE);
UART_ITConfig(UART1, UART_IT_RX, ENABLE);
UART_ITConfig(UART1, UART_IT_RXBRK, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_7);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_7);
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_High;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStruct);
NVIC_InitStruct.NVIC_IRQChannel = UART1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
UART_Cmd(UART1, ENABLE);
}
从机中断服务子程序
void UART1_IRQHandler(void)
{
uint8_t i = 0;
if (SET == UART_GetITStatus(UART1, UART_IT_RXBRK))
{
UART1_RxLength = 0;
UART_ClearITPendingBit(UART1, UART_IT_RXBRK);
UART_ITConfig(UART1, UART_IT_RXIDLE, ENABLE);
}
if (SET == UART_GetITStatus(UART1, UART_IT_RX))
{
UART1_RxBuffer[UART1_RxLength] = UART_ReceiveData(UART1);
UART1_RxLength = (UART1_RxLength + 1) % 100;
UART_ClearITPendingBit(UART1, UART_IT_RX);
}
if (SET == UART_GetITStatus(UART1, UART_IT_RXIDLE))
{
for (i = 0; i < UART1_RxLength; i++)
{
LIN_SLAVE_RxBuffer[i] = UART1_RxBuffer[i];
}
LIN_SLAVE_RxLength = UART1_RxLength;
LIN_SLAVE_RxFinish = 1;
UART_ClearITPendingBit(UART1, UART_IT_RXIDLE);
UART_ITConfig(UART1, UART_IT_RXIDLE, DISABLE);
}
}
从机例程
从机对帧头包含信息解析,确定是发送应答,还是接收应答。
void UART_LIN_Slave_Sample(void)
{
uint8_t i = 0;
uint8_t Checksum = 0, FrameID = 0;
uint8_t Length = 0, Buffer[100];
printf("
Test %s", __FUNCTION__);
Length = 0;
LIN_SLAVE_RxLength = 0;
LIN_SLAVE_RxFinish = 0;
for (i = 0; i < 100; i++)
{
Buffer[i] = 0;
LIN_SLAVE_RxBuffer[i] = 0;
}
UART_Configure(19200);
while (1)
{
if (1 == LIN_SLAVE_RxFinish)
{
LIN_SLAVE_RxFinish = 0;
if (0x55 == LIN_SLAVE_RxBuffer[0])
{
if (2 == LIN_SLAVE_RxLength)
{
LIN_SLAVE_Response(Buffer, Length);
}
else
{
for (i = 2; i < LIN_SLAVE_RxLength - 1; i++)
{
Buffer[i - 2] = LIN_SLAVE_RxBuffer[i];
}
Length = LIN_SLAVE_RxLength - 3;
}
}
}
}
}
3.4 验证
通过UART接口连接两块MM32F5270 MiniBoard,观察串口调试助手:
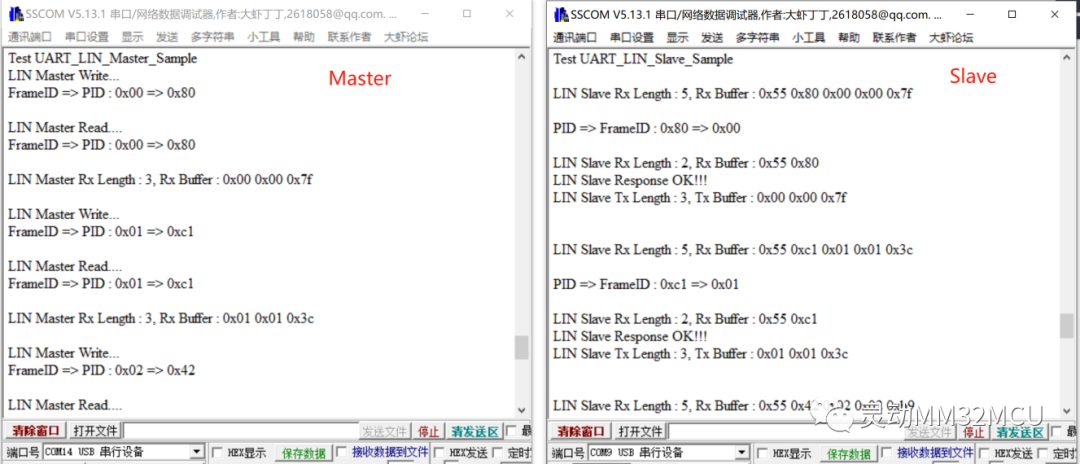
先由主机发布数据,从机接收数据,接着由从机发布数据,主机接收数据,依次循环进行。根据截图信息,主从机收发数据一致,与程序逻辑相符,两块板LIN通信成功。
审核编辑:刘清
-
【MM32F5270】Keil开发环境搭建2024-11-06 5197
-
基于MM32F5270的I2S音频播放2023-10-30 3274
-
MM32F5270平台ADC注入通道的单周期采样的实现2023-05-26 1688
-
MM32F5270 产品手册(中文版)2023-02-23 794
-
基于MM32F5270控制器的I2S音频播放2022-09-16 4335
-
一文解析MM32F5270开发板+PWM测试与调制2022-09-06 3473
-
基于MM32F5270开发板获取雨滴传感器的数据相关资料介绍2022-08-24 3520
-
MM32F5270总线架构设计2022-05-11 3162
全部0条评论

快来发表一下你的评论吧 !
