

一种用于2D/3D图像处理算法的指令集架构以及对应的算法部署方法
描述
二维(2D)和三维(3D)双模视觉信息在自动驾驶、工业机器人、人机交互等前沿领域具有广泛的应用前景。但是2D和3D两种模式视觉信息在处理方法上存在较大的差异,使得边缘端计算型处理器难以兼顾两种模式的处理需求;同时以深度学习为代表的人工智能算法的计算密集和高数据复用率等特点进一步增加了处理器电路的设计复杂度,导致边缘端实现双模视觉信息智能处理的芯片设计面临大的挑战。
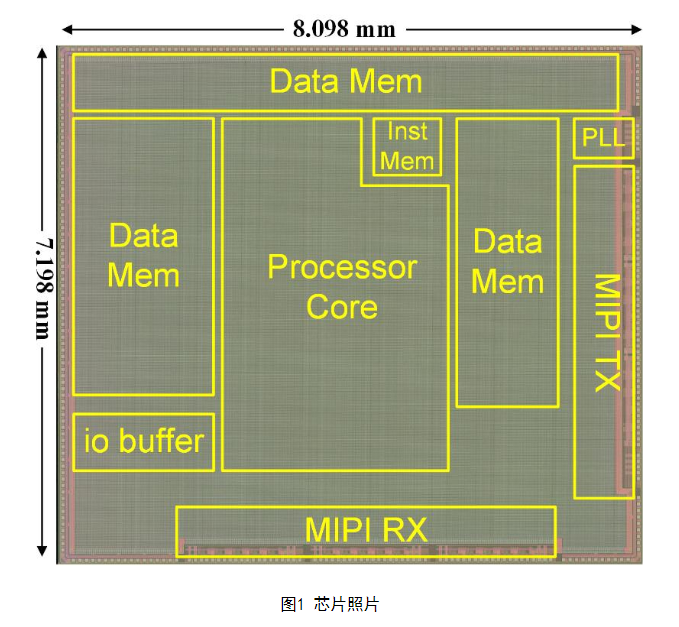
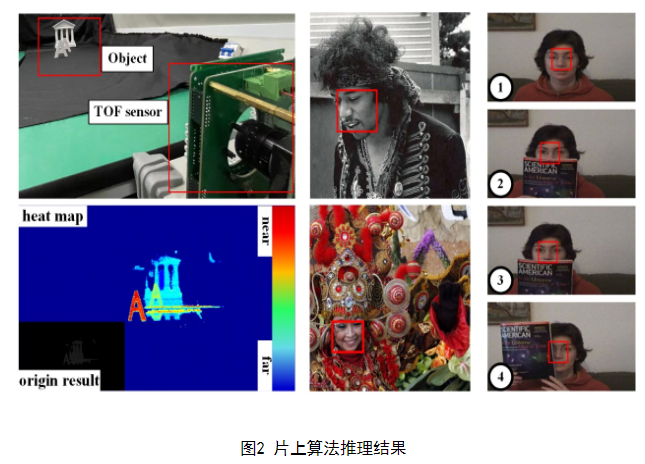
中国科学院半导体研究所刘力源研究员带领的团队在双模视觉信息智能计算芯片设计领域取得重要进展。团队创新性地设计了一款兼容处理2D/3D双模视觉信息的视觉处理器架构和用于人工智能算法的数据流。提出了一种可重构并行处理单元阵列架构,并行处理单元阵列支持向量化单指令多数据处理模式,可显著提升人工智能算法的数据复用率,减小了算法处理延时和访存功耗;设计了一种用于2D/3D图像处理算法的指令集架构以及对应的算法部署方法,能够灵活映射从数据预处理到智能处理阶段的图像处理算法,消除冗余的专用图像处理电路,提升了芯片单位面积算力。测试结果表明,芯片可实现3D深度重建、2D人脸目标检测和2D目标追踪算法。图1和图2分别为芯片照片和片上算法处理结果。该工作为设备功耗与体积均受限的边缘场景多模态视觉信息智能处理提供了一个高效且灵活的智能化计算平台。
该成果由半导体所博士生魏思源等在刘力源研究员的指导下完成。成果得到了国家重点研发计划和国家自然科学基金等项目的资助。
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于蜂鸟E203架构的指令集K扩展2025-10-21 312
-
指令集测试的一种纠错方法2025-10-24 269
-
如何同时获取2d图像序列和相应的3d点云?2018-11-13 3036
-
一种基于FPGA的实时视频图像处理算法研究与实现2019-06-28 4016
-
3D图像生成算法的原理是什么?2021-06-04 1672
-
基于深度学习和3D图像处理的精密加工件外观缺陷检测系统2022-03-08 28299
-
2D到3D视频自动转换系统2018-03-06 1783
-
阿里研发全新3D AI算法,2D图片搜出3D模型2020-12-04 4778
-
谷歌发明的由2D图像生成3D图像技术解析2020-12-24 5812
-
3d人脸识别和2d人脸识别的区别2022-02-05 54383
-
如何直接建立2D图像中的像素和3D点云中的点之间的对应关系2022-10-18 11468
-
2D中值滤波算法的设计实现2023-07-12 1848
-
使用Python从2D图像进行3D重建过程详解2023-12-05 5489
-
介绍一种使用2D材料进行3D集成的新方法2024-01-13 2401
全部0条评论

快来发表一下你的评论吧 !
