

如何搞定自动驾驶3D目标检测!
汽车电子
描述
0. 写在前面
3D目标检测是自动驾驶非常重要的一个基础任务,其重要性不言而喻。今天笔者为大家推荐一篇3D目标检测方向的最新综述。
作者:Xinzhu Ma, Wanli Ouyang, Andrea Simonelli, Elisa Ricci
2. 摘要
图像中的3D目标检测是自动驾驶中的基础且具有挑战性的问题之一,近年来受到了工业界和学术界越来越多的关注。得益于深度学习技术的快速发展,基于图像的三维检测取得了令人瞩目的进展。特别地,从2015年到2021年,已经有超过200项工作研究了该问题,涵盖了广泛的理论、算法和应用。然而,到目前为止,还没有最近的调查来收集和整理这些知识。在本文中,我们填补了文献中的这一空白,并首次对这一新颖且不断增长的研究领域进行了全面调查,总结了基于图像的3D检测最常用的pipeline,并对其每个组成部分进行了深入分析。此外,我们还提出了两个新的分类法,将最先进的方法组织成不同的类别,目的是对现有方法进行更系统的审查,并与未来的工作进行公平的比较。在回顾迄今为止所取得的成果的同时,我们还分析了该领域目前面临的挑战,并讨论了基于图像的3D检测研究的未来方向。
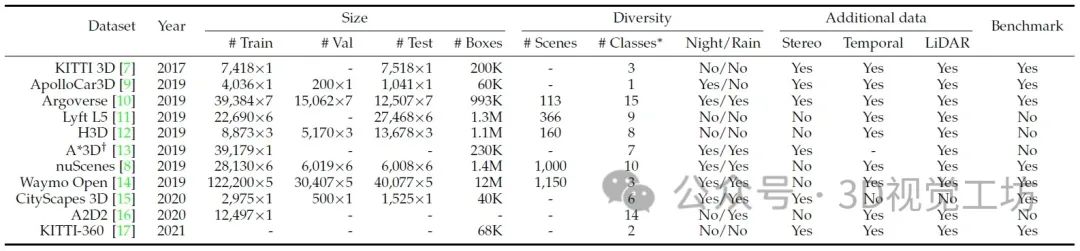
3. 数据集总结
可用于自动驾驶场景下基于图像的3D目标检测的数据集总结。其中一些数据集包括多个任务,这里只报告了3D检测基准(例如KITTI 3D发布了超过40K的图像,其中约15K用于3D检测)。
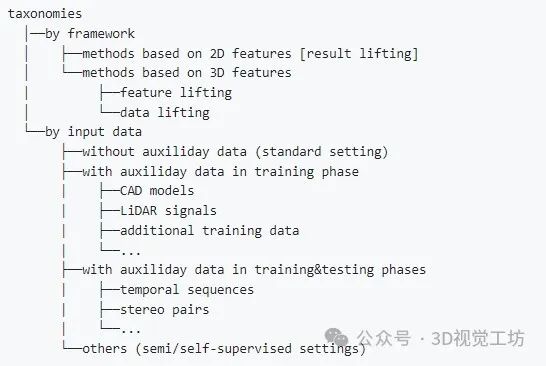
4. 分类法
为了便于对现有方法进行系统分析,并在未来的工作中进行公平的性能比较,作者提出了两种新的分类法,即根据所采用的框架和使用的输入数据对现有方法进行分类。
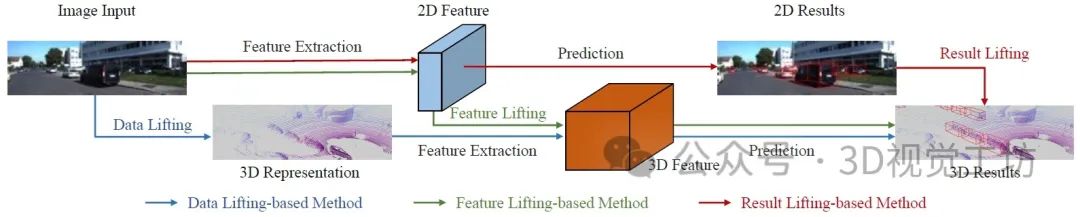
基于图像的3D目标检测pipeline的概述。分别展示了使用蓝色、绿色和红色箭头的数据提升、特征提升和结果提升方法的数据流。
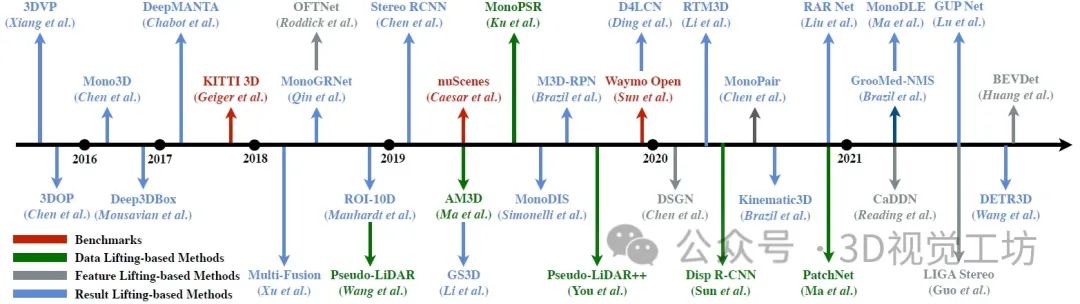
对最相关的基于图像的3D检测方法和基准进行了时间上的列举。
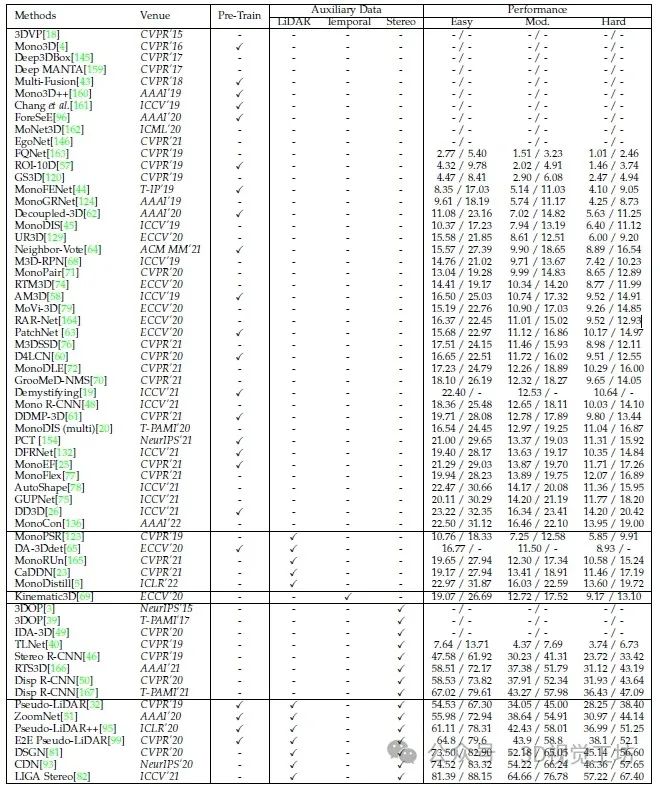
在顶会顶刊上发布的基于图像的3D探测器对辅助数据和结果的要求。在Car类别的KITTI测试集上报告了用于3D / BEV检测的AP | R40。根据所使用的辅助数据对方法进行分组,每组中的方法在适中的设置下通过3D AP | R40进行排序。还展示了这些方法是否使用了预训练权重(排除ImageNet预训练)。
5. 未来发展
作者认为,未来3D目标检测主要有两个挑战:
(1)从2D图像中感知3D世界是一个不适定问题;
(2)标注3D数据是极其昂贵的,并且现有数据集的规模仍然有限。
对于第一个问题,可以探索更好的深度估计方法,也可以利用多模态和时间序列。对于第二个问题,应该考虑完监督学习之外的方法。此外,也可以考虑从大规模预训练模型中进行迁移学习。最后,考虑到3D目标检测的应用场景,还应该考虑模型的泛化能力。
6. 总结
这篇文章对基于图像的自动驾驶3D检测的最新进展进行了全面的综述。作者首先对现有的方法进行了分类。然后对这些算法进行了详细的比较,讨论了3D检测的每个必要组成部分,如特征提取、损失建模、后处理等。还讨论了辅助数据在该领域的应用,以及开放性挑战和潜在方向。
审核编辑:黄飞
-
基于3D视觉系统的自动驾驶导航2018-08-17 7522
-
#硬声创作季 用于自动驾驶的实时多模态3D目标检测Mr_haohao 2022-10-12
-
谷歌的自动驾驶汽车是酱紫实现的吗?2011-06-14 4871
-
自动驾驶真的会来吗?2016-07-21 14676
-
自动驾驶汽车的定位技术2019-05-09 3587
-
如何让自动驾驶更加安全?2019-05-13 3801
-
3D传感器如何为车内安全保驾护航?2020-07-29 1899
-
自动驾驶的核心基础在高精3D地图2018-02-25 1875
-
自动驾驶汽车你可能见过,3D 打印的自动驾驶汽车你可见过?2018-06-04 3724
-
达摩院自动驾驶新突破 检测器登顶自动驾驶权威比赛2020-03-19 4290
-
自动驾驶检测器可同时实现3D检测精读和速度的提升2020-03-20 3352
-
基于图像的3D目标检测是自动驾驶领域综述2022-11-15 3119
-
自动驾驶3D点云语义分割数据标注2023-06-06 946
-
如何利用车载环视相机采集到的图像实现精准的3D目标检测2023-07-26 1429
-
使用STT全面提升自动驾驶中的多目标跟踪2024-10-28 1664
全部0条评论

快来发表一下你的评论吧 !
