

工业上常见的高精度主动式重建算法
测量仪表
描述
目前常见的高精度主动式重建算法,主要分为:ToF激光雷达、三维结构光(散斑、线、面)、相位偏折术、白光干涉仪、共聚焦等算法。在调研了一圈之后,我发现:
ToF激光雷达:由于光的传播速度很快,所以分辨率较低,很难做到μm级,SLAM导航里用的比较多。
3D结构光:投影编码图案、解码图案(可以是散斑、线、或者面),再利用双目相机拍照,利用三角法进行重建,精度可以做到1-100μm,工业上用的比较多,主要测量漫反射物体。
相位偏折术:该技术比较前沿,主要测量镜面反射物体,通过屏幕投影图案,相机拍照,计算物体表面的梯度,再进行梯度积分,获取物体型面,可以达到100纳米级。
白光干涉仪:相移干涉法使用特定波长范围内的光源来确认目标面反射光和参考面反射光之间的光干涉,需要复杂的精密仪器,适用于小视场、高精度的场景,可以达到亚纳米级别。
共聚焦原理:距离不同,物体成像清晰程度不同,通过累积不同焦平面的图像序列,计算物体表面形状。视场同样较小,精度稍逊于白光干涉仪,但胜在能够提供全彩图像。
上面提到的相位偏折术,到底是什么样的一种重建技术呢?
Elon Musk曾表示,"在实现全自动驾驶的过程中,三维重建技术是不可或缺的一环。" Facebook的创始人Mark Zuckerberg也指出,"元宇宙时代的来临将更加依赖于高度精细的三维空间表达。" 这些业界巨擘的言论无疑为三维重建的未来发展注入了强大动力。
三维重建目前是最为炙手可热的领域。摄影测量或结构光投影技术可以解决漫反射重建问题,但却无法有效应对镜面反射物体(如玻璃、积水、反光物体和汽车车身)等的重建挑战。三维重建领域研究学者Kuosheng Jiang曾说:High brightness and high reflectivity are two significant challenges that remain to be addressed in machine vision inspection.因此,采用相位测量偏折术的方法可以快速而准确地完成对这些高反射物体的三维测量检测。
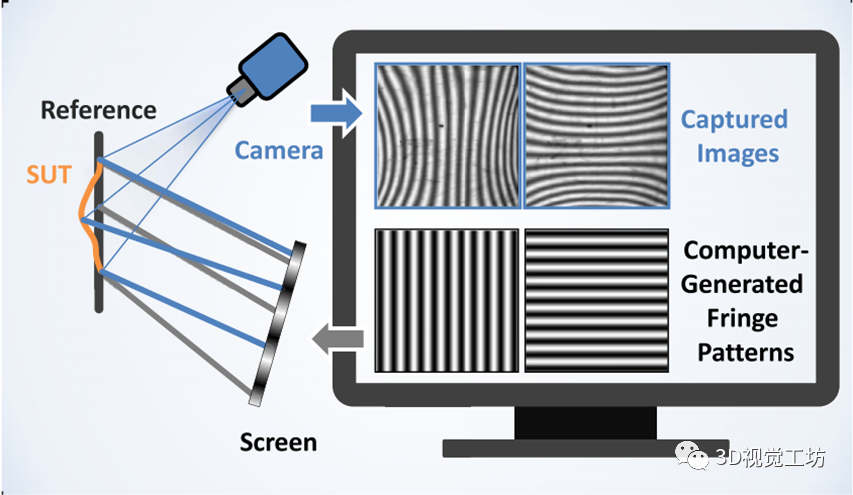
相位测量偏折术是检测和重建光滑、反光表面的理想选择。它采用一个显示屏和一个相机就可完成测量:显示屏上显示一系列黑白条纹,经过反射镜反射后发生形变,被相机捕捉。通过对相机拍摄的变形的条纹进行解调,就可以恢复镜面的三维形貌。基于光反射的机器视觉软件精确计算物体表面的不平坦区域位置。因此,即使是肉眼无法察觉的微小缺陷,如划痕、凸起、裂纹、凹陷和气泡,都可以被准确检测和定位。
偏折测量术现已经广泛应用于精密测量、车床加工、三维重建等多个领域放光发热,是近年来发展非常迅速地一个方向。
审核编辑:黄飞
-
高精度MLCC2013-02-28 4295
-
用C51语言实现单片机高精度定时的新算法2014-06-30 1956
-
基于PPEC的高精度磁铁电源应用分享2022-07-25 1196
-
市场上几种常见的测量长度的工业仪器2023-10-11 10148
-
一种高精度的图像匹配算法2011-10-10 1062
-
基于FFT的高精度频率估计算法2012-02-08 979
-
ECT图像重建算法的FPGA实现2015-11-19 988
-
高精度太阳能算法2016-05-20 581
-
一种新的估计基础矩阵的高精度鲁棒算法2017-01-03 831
-
基于坐标变换的快速高精度图像拼接算法_刘凌云2017-01-12 1218
-
基于各向异性TV最小化重建算法2017-12-12 1709
-
基于分析稀疏表示的图像重建算法2018-03-07 1188
-
如何使用单目视觉进行高精度三维场景重建技术研究2018-12-24 1939
-
OPPO推出自研RTK高精度定位算法,精度小于1米2020-10-26 3052
-
如何对RTK高精度定位算法进行验证2022-10-11 5885
全部0条评论

快来发表一下你的评论吧 !
