

如何通过柔顺性接触实现通用机器人装配
机器人
描述
摘要:接触可以被概念化为对以某种方式相互作用的两个物体施加的一组约束。接触的性质,无论是点、线还是面,决定了这些物体在给定力的情况下如何相对运动,一组接触可以对物体的运动提供部分或全部约束。几十年来,人们一直在探索如何明确地估计接触的位置及其动力学,例如摩擦特性,但所研究的方法在计算上很昂贵,并且在最终计算中往往存在很大的不确定性。这影响了对人类来说看似简单的需要大量接触的任务的进一步发展,比如普遍的钉孔插入。在这项工作中,我们不是明确地估计物体与其孔之间的个体接触动力学,而是通过研究顺应性接触形成来解决这个问题。更正式地说,接触形式是根据施加在物体可用自由度上的约束来定义的。我们不是估计单个接触位置,而是将该计算抽象为隐式表示,允许机器人在插入过程中通过监测施加在末端执行器上的力来获取、维持或释放对物体的约束。使用一个兼容的机器人,我们的方法是可取的,因为我们能够完成公差为0.25mm的行业相关插入任务,而无需事先知道确切的孔位置或方向。
Towards Generalized Robot Assembly through Compliance-Enabled Contact Formations | IEEE Conference Publication | IEEE Xplore
一、方法
从根本上说,接触形态(CF)代表了离散位置和物理关系的分组。因此,解决插入问题可以被定义为从起始到最终 的遍历,通过中间CF过渡,即在这项工作中,通过在CF空间中遵循固定路径来证明该方法的有效性。
形式上,沿着CF空间的轨迹从一个CF过渡到一个新的CF,相当于在对象的可用自由度上添加或删除约束。因此,顺应性的作用是确保在通过力调制进行操作时保持单个所需的CF,并且在物体的运动受到环境阻碍时检测到转换。一旦机器人感知到F/T信号的变分变化,就会检测到接触形态的变化,系统就在中过渡了。从概念上讲,沿着单个轴移动,直到不再可能,在保持该力的同时,垂直移动,直到添加另一个约束。
控制柔度接触形成的理论是,约束可以不断添加,直到插入任务完成。值得注意的是,任何当前不受约束的自由度都可以被控制以执行其他任务,而无需修改系统的当前CF。例如,物体和孔表面之间的边缘接触允许机器人通过滑动探索,直到检测到侧向力,从而实现新的CF。值得注意的是,在这种加性力接触过程中,如果已知起始CF,并且可以通过F/T信号检测到过渡,则可以明确估计当前CF。
通过依靠F/T感知环境感知,算法利用以下假设:
·物体以稳定、居中和直立的抓取开始。这种抓握预计将保持下去。
·CF0有0个约束,即从空间开始的6个自由自由度。
·孔位于xy平面上已知的二维工作空间边界内(例如,10厘米的勘探尺寸)。
·对象的面部类型已知的最小知识,但假设是凸或近凸。
·在工作空间内存在一个低接触摩擦和正公差匹配的孔。
·在工作空间内,除了孔、平面和被操纵对象之外,没有其他对象。这确保CF转换匹配预设的CF空间路径。
提出的方法遵循CF空间中的期望路径,总共通过7个步骤定义。为了便于标记,将目标框架设置为正交框架,x轴指向目标在孔表面平面上的运动方向,z轴向下。对于每一步,都提供了相应的隐式CF控制目标。虽然我们为力调制定义了一组值,但这是为了清晰起见,并且在实践中是根据使用机器人变化的。
假设通过F/T传感器在装配插入过程可分别获取三维力及三维力矩数据,目标为让机器人通过期望的CF空间轨迹。算法流程如下:
·到达孔平面(当前约束:无;目标约束:+ ;隐式CF目标:,接触面上的点或边;额外动作:在工作区内随机选择x/y方向进行水平探索、操纵物体向侧边方向倾斜运动保证边/面接触同时避免面/面接触。)
·搜孔(当前约束:+ ;目标约束:+ ;隐式CF目标:,和孔进行三点接触;额外动作:水平运动作为先前步骤)
·楔入(当前约束:+ ,+ ;目标约束:+ ;隐式CF目标:,和孔进行四点接触)
·轴孔的旋转对准(当前约束:+ ,+ ,+ ;目标约束:+ ;隐式CF目标:,铰链式接触;注意:此步骤仅适用于非圆柱形对象)
·校正向上倾斜(当前约束:+ ;目标约束:+ ,+ ;隐式CF目标:,棱柱关节式接触;额外动作:围绕x和y轴旋转,以尽量减少在前面步骤中由于指尖滑动而导致的物体与手之间的累积角度;注意:横向力现在被最小化以避免干扰物体,这也有助于中心的孔中的对象,如果挂钩旋转不是完美的中心在物体的质量中心)
·插入轴(当前约束:+ ,+ ,+ ;退出条件:当指尖开始接触孔表面或物体触及孔底时,切换到脱离状态。这可以通过z向力的急剧增加来检测)
·分离握把和收回手臂
二、实验
我们在一个低阻抗机械臂和一个柔性、欠驱动的手上评估了我们的算法。该机械臂是一个7自由度Barrett WAM,通过OMPL利用RRTConnect算法进行全局规划,并通过基于雅可比的速度控制器进行局部控制。由于其真实系统动力学的内部模型不准确,机械手是不精确的,这进一步挑战了我们的算法的鲁棒性。末端执行器是一个改编的Yale OpenHand Model O,是一个被动自适应手,由三个执行器和六个关节组成。为了减轻重量和成本,手没有配备触觉传感器或关节编码器,使得在操作过程中难以估计系统的真实状态。对现成的开源设计的修改包括圆形指尖,以方便在手操作,以及关节内的轴承。设计了一种手持式操作控制器,用于物体方向高达±20°的精细运动控制。连接手和手臂的是一个以30Hz采样的6轴ATI力/扭矩传感器。最后,一个摄像头被固定到手掌,以便通过AprilTags在操作过程中监控对象的姿势。
通过各种实验验证了该算法的有效性。在我们的第一个实验中,我们开发了一个线性推杆,由一个丝杠和一个步进电机组成,用来沿着夹持器工作空间的不同轴移动物体。在这个测试中,我们测量了推手施加在物体上的力,并记录了在指尖滑动之前抓手可以承受的力的大小。之后,我们用严格公差任务(0.25mm)、儿童插入玩具中的市售对象和NIST组装任务板#1中的两个任务来测试我们的算法。
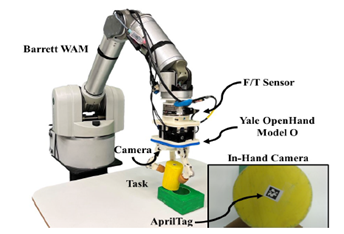
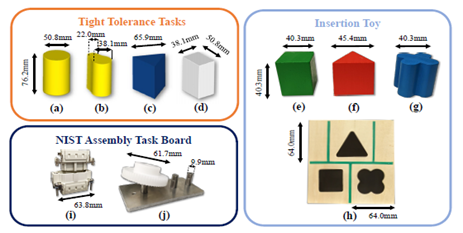
图 1 实验采用的平台及实验对象
首先,我们感兴趣的是量化我们系统的柔顺性。从概念上讲,一个具有固定接触的纯粹顺应系统可以无限期地顺应,直到达到硬停止,但实际上对于手爪来说,存在一个极限,即施加在物体上的力可以通过指尖接触来抵抗。这些信息对于量化是有价值的,因为它使系统能够预测何时可能发生滑移,进而可以用于通知接触层的切换。
给定线性推杆以3mm/s的速度运行,我们沿着x,y和z轴推动机械手抓住的图1中的(a)圆,持续12秒,超过6次试验。每次试验后,系统复位。在每次试验中,记录了F/T传感器通过推杆测量的力,并绘制了每次评估的平均值和标准差。请注意,对于每个线性推动,力平台是可区分的,在±1.5N处x和y轴如图 2(a)和(b),在±4N处z轴如图 2(c)。这些平台对应于手在相应方向上抵抗力的能力,或者更物理地说,是克服接触的静摩擦并实现新的手-物体结构的点。这个数据能够帮助量化给定外力的稳定接触操作区域。一旦超过一个力水平,就会发生滑动,手-物体状态重新配置,直到再次实现稳定。
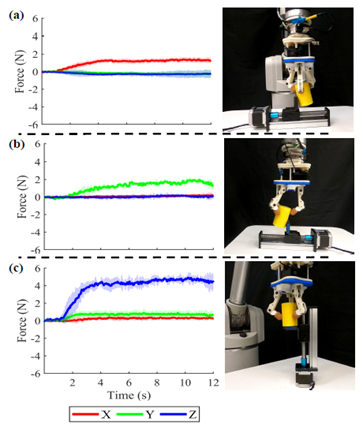
图2 沿每个维度的力平台评估
矩形案例研究:利用在柔顺性测试中获取的力信息来获取和维持CF。利用提出的算法,将目标调制力分别设置为沿x,y和z轴的0.7N, 0.7N和1.5N,这是发生滑移之前最大力的40-50%。第一个实验中尝试沿着物体的z轴插入具有初始27.1°轴向偏移的紧公差图2(d)矩形。值得注意的是,洞的确切位置是未知的,系统的搜索空间为8cm×8cm。这个过程首先要找到一个向下的力,即第一个约束,并在搜索空间内选择一个勘探方向(在本例中为+ ),直到检测到一个额外的约束(过渡3)。x轴上的额外力尖表示洞的周长,并开始一个力过渡。图 3(b)证明了这一过程,其中力在状态1-7的设定值附近不断添加和调制。注意,尽管符合要求,但由于可控性,WAM机器人难以调节速度,因此也难以调节力。此外,图 3(b)中的力在世界框架中表示,以表示步骤4-5期间的旋转,并且为了清晰起见进行了平滑处理,因此没有表示力峰值。
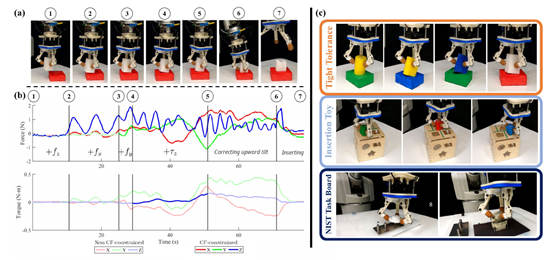
图 3 装配插入过程
所有对象:我们能够插入各种凸形或近凸形几何形状的对象,特别是圆形、梨形和三角形面。我们对公差、探索时间、插入时间和偏移度的评估结果如表1(a-d)所示。在评估过程中,我们注意到(a)圆是最简单的,因为它不需要z轴偏移控制。其他目标(b-d)难度更大,具有各种挑战。首先,初始偏移量不同,从27.1°到41.1°不等。物体(c)和(d)有尖锐的边缘,容易产生干扰,而物体(b)由于其非凸性而呈现困难。提出的算法克服了这些挑战,我们能够在没有预先了解孔位的情况下,成功地完成0.25mm公差的物体插入。
表1 对象插入实验的度量
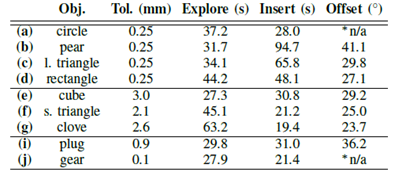
除了我们严格的容忍度评估之外,我们对我们的方法在开放世界任务中的适用性很感兴趣。我们的第一个实验是用市售的儿童玩具,由不同的物体几何形状组成,孔公差约为2.5毫米。与之前的实验类似,洞的姿态未知,搜索区域现在被限制在6.4cm×6.4cm的空间内。在这里,我们尝试挑战我们算法的探索部分,确保对象从搜索空间的边缘开始。所有插入都成功完成,(g)瓣的最长探测阶段为63.2秒。有趣的是,丁香的非凸性并没有像最初认为的那样使插入过程复杂化,因为物体的圆形边缘有助于限制干扰的发生。我们最后的实验评估了NIST组装任务板上的插头和齿轮插入。齿轮任务的有趣之处在于,将钉在孔中的范式转换为钉在孔上的模式。这对我们的系统来说不是问题,因为搜索模式是在孔的底部完成的,即齿轮,而不是使用钉。同样,使用放松的柱塞弹簧插入插头也很容易完成,从z轴偏移36.2°开始。
三、结论
这项工作提出了一种方法,利用顺应性的接触形态,作为对机器人的广义,紧密公差插入的一步。提出的算法很简单,但机械接地,并利用了通过附加接触约束(即操纵漏斗)减少不确定性的概念。值得注意的是,在这项工作中,我们不需要使用昂贵的学习框架或特定于系统的理想化分析模型——这种方法是有效的,但不需要一个方程来详细描述。作者对这一初步探索感到兴奋,因为我们的实验说明了我们的方法对未来应用的有效性。
审核编辑:黄飞
-
导远科技与银河通用机器人达成战略合作2026-03-13 773
-
机器人看点:宁德时代入股银河通用机器人 机器人企业扎堆赴港上市2025-09-29 3291
-
借助NVIDIA技术实现机器人装配和接触密集型操作2025-06-04 1093
-
AgiBot World Colosseo:构建通用机器人智能的规模化数据平台2025-03-12 2228
-
地瓜机器人发布一系列通用机器人套件2024-09-25 1530
-
银河通用机器人完成7亿元天使轮融资2024-06-24 1394
-
力传感器在机器人的应用2023-11-16 2430
-
工业喷涂机器人实训系统设计2021-07-01 1922
-
通用机器人什么时候上线2020-06-18 971
-
工业机器人由哪些主要部件构成2020-05-13 2588
-
dfrobotGMR通用机器人扩展板简介2019-12-26 2492
-
机器人通用测控平台的设计与实现2014-04-21 2572
-
智能配送装配机器人2013-10-24 24
全部0条评论

快来发表一下你的评论吧 !
