

基于瑞萨RA2E1 MCU芯片的蓝牙平衡小车设计
描述
本项目由瑞萨RA2E1 MCU芯片作为主控,搭载电源模块、MPU6050模块、超声波模块、OLED模块、蓝牙模块、电机模块等组成的蓝牙平衡小车。该小车有平衡模式、跟随模式和避障模式三种运行模式,项目实现如下:
通过蓝牙控制平衡小车运行模式
小车拿起、放下、放倒检测(控制小车是否运行)
可通过Type-C数据线与上位机调试
预留NRF24L01、红外接口、多路电源接口可以拓展开发
项目功能演示
Part
01硬件介绍
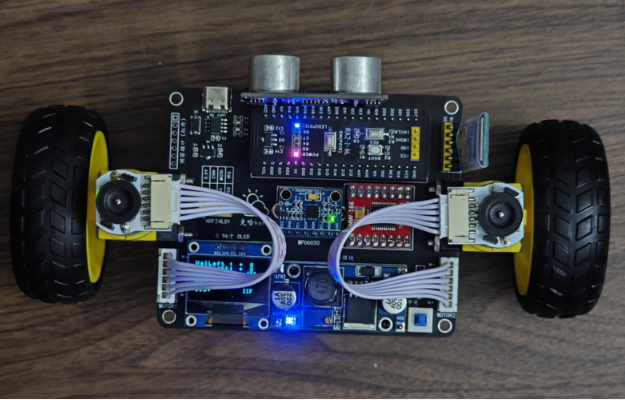
1、平衡小车实物图
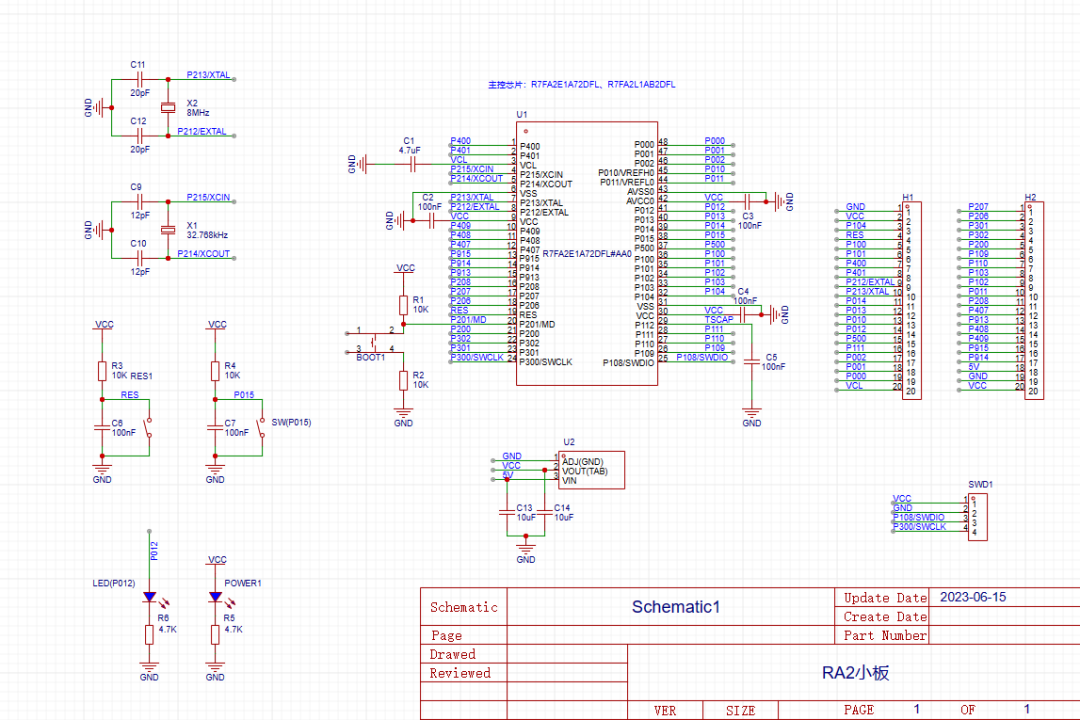
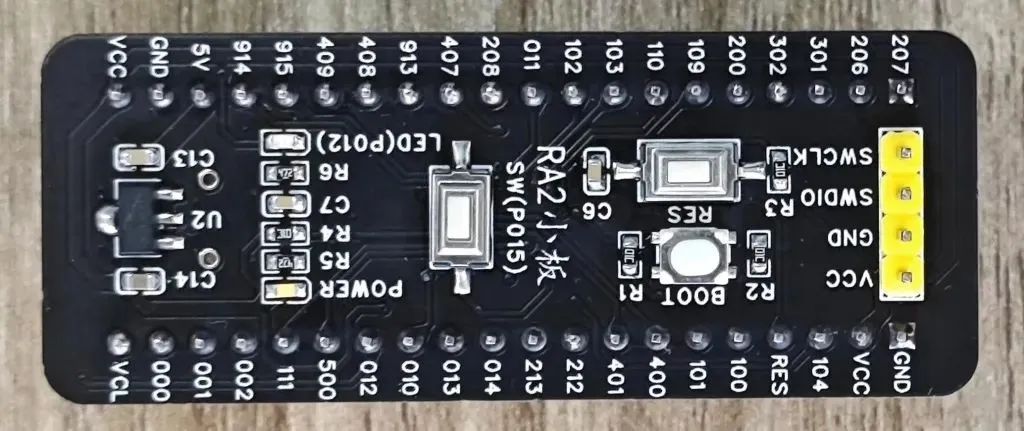
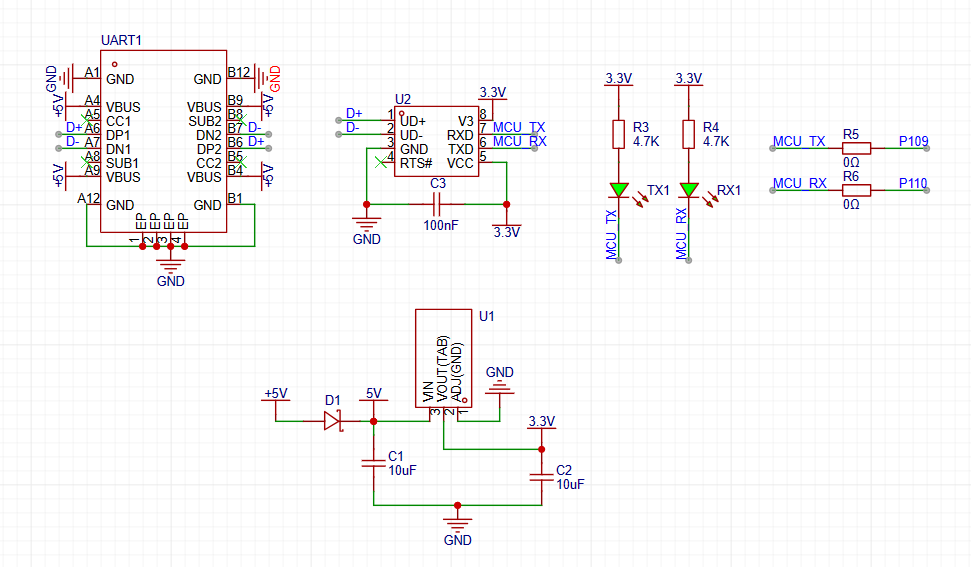
2、RA2小板
由于开发板不易于与底板链接,所以自行制作了一块小板
RA2小板原理图:
RA2小板实物图:
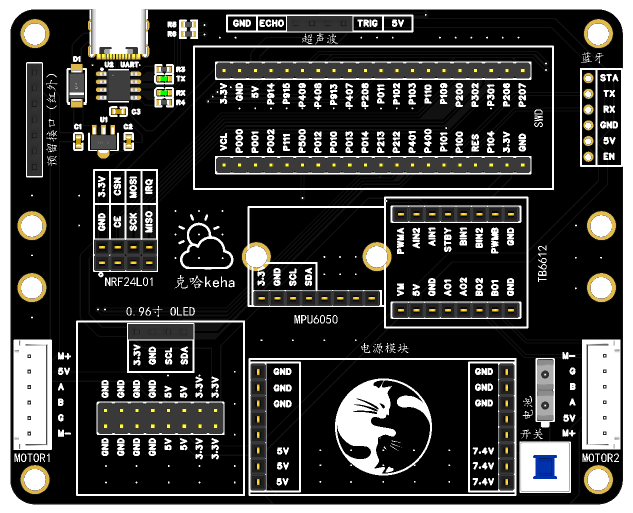
3、RA平衡小车底板
4、平衡小车底板串口模块
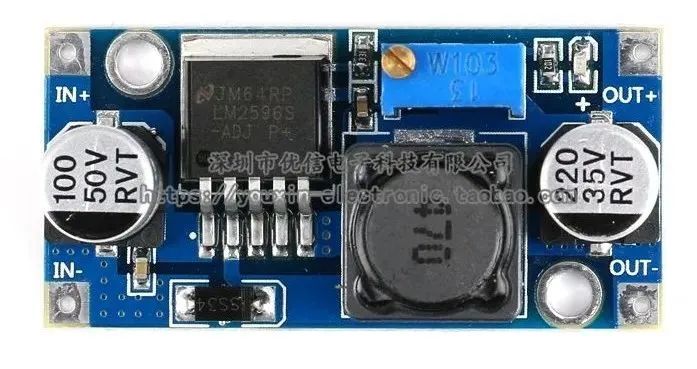
5、电源模块:LM2596S DC-DC降压电源模块
6、MPU6050模块:MPU-6050模块三轴加速度+三轴陀螺仪

7、OLED模块:0.96寸 OLED显示液晶屏模块
(注意区分VCC与GND引脚顺序,下图不正确)

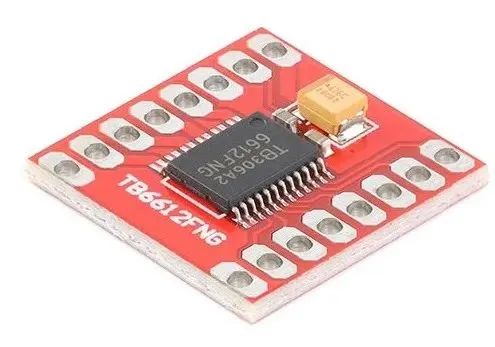
8、电机驱动模块:TB6612FNG电机驱动模块
9、蓝牙模块:蓝牙3.0模块 SPP透传 兼容HC-05/06从机 JDY-31

Part
02系统介绍
瑞萨RA平衡小车系统框架如下图:
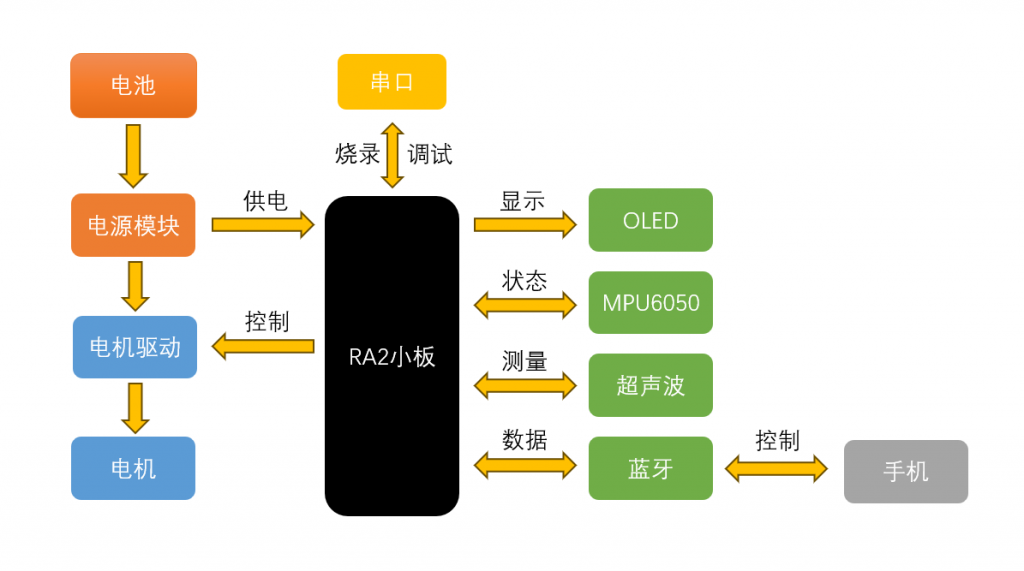
电源:2串电池产生7.2V,输入到电源模块产生5V,再通过LDO产生3.3V。
平衡模式:通过MPU6050检测小车姿态,RA MCU控制电机驱动模块控制电机运行,并显示到OLED上。
跟随模式:小车通过超声波模块检测距离,在一定距离内开启跟踪。
避障模式:小车直行,通过超声波模块判断前方是否存在障碍物,若遇到障碍物将转弯。
蓝牙:手机通过与蓝牙模块链接,控制小车运行模式,并可对小车进行控制。

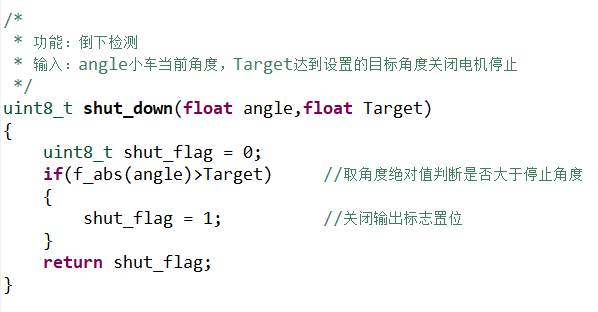
平衡小车倒下检测:当小车倒下(到达一定角度),停止电机
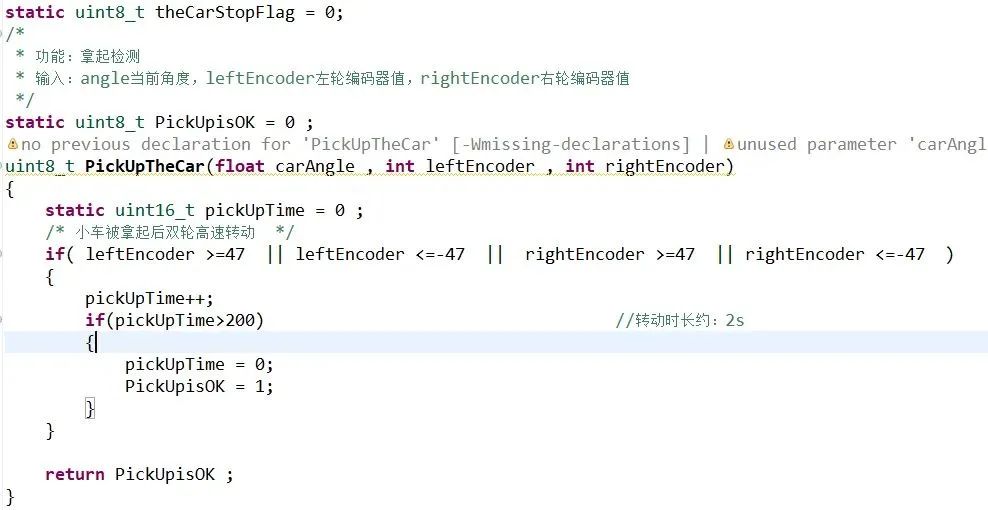
平衡小车拿起检测:当小车被拿起来(轮子高速转动一定时间),停止电机
平衡小车放下检测:当小车重新被放下一定时间(轮子没有转动并且角度小于一定范围),重新进入平衡模式

-
Renesas RA2E1微控制器:低功耗与高性能的完美结合2026-04-01 514
-
基于瑞萨RA2E1 MCU的LCR数字电桥项目介绍2026-02-10 2342
-
电子时钟制作(瑞萨RA)(1)----使用串口进行打印2023-12-01 2381
-
基于瑞萨RA系列R7FA2E1A52DFJ MCU的无叶风扇控制方案2023-09-26 2527
-
使用瑞萨e² studio FSP基于RA2E1定时器配置PWM输出2023-08-01 2535
-
支持RT-Thread最新版本的瑞萨RA2E1开发板终于要大展身手了2023-05-16 2693
-
工程师自述:如何将RA2E1并入到RT-Thread的主线仓库2023-03-25 2177
-
CPK-RA2L1/RA2E1 评估板入口2023-01-13 809
-
RA2E1实现RTT Viewer串口打印2022-12-09 3440
-
RA2E1开发板资料2022-11-07 682
-
入门级RA系列RA2E1 MCU组用于低功耗和空间受限应用2022-04-29 3563
-
使用RA2E1 MCU和FSP实现超低设计2022-04-25 3410
-
产品 | 瑞萨RA产品家族入门级RA2E1 MCU产品群, 以满足成本敏感与空间受限型应用需求2022-01-06 3273
-
瑞萨电子扩展32位RA2 MCU产品群推出48款全新RA2E1 MCU产品2021-01-27 1880
全部0条评论

快来发表一下你的评论吧 !
