

RA6T2无传感器矢量控制应用笔记 [4] 控制程序描述 (2)
描述
3. 控制程序描述
介绍本应用笔记的目标软件。
3.1.7 采用单电阻时的相电流测量方法
本节阐述了使用本软件测量相电流的方法。
1、相电流的测量时间
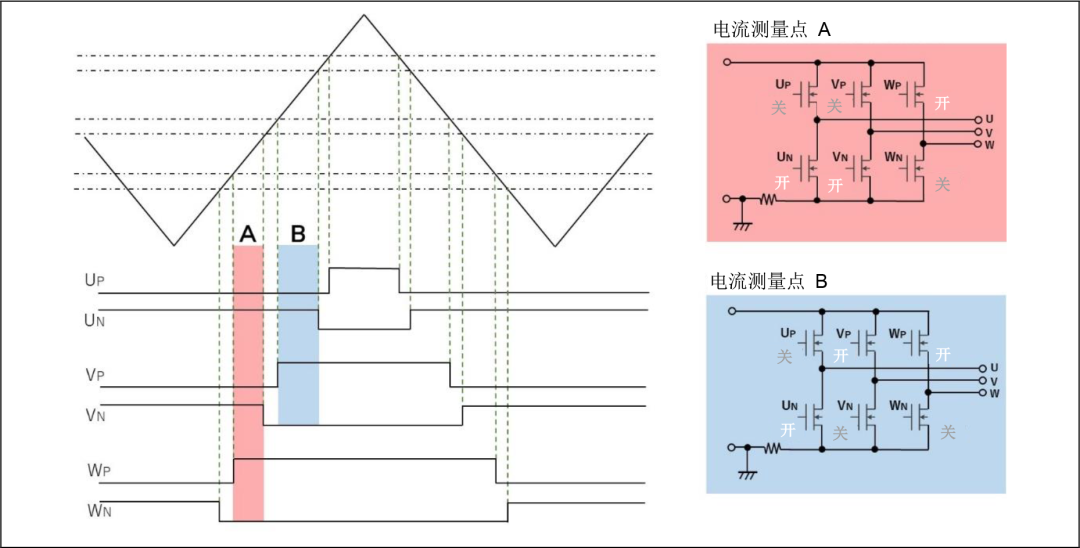
图3-5 PWM的波形(占空比模式 W>V>U)
在本程序中,三角波PWM模式3通过GPT单元生成包含死区时间的PWM波。图3-5显示占空比模式为W>V>U时PWM的波形。
在图中点A的位置,只有W相的上臂处于打开状态,如右侧红色矩形所示。在此情况下,流经单电阻的电流与流经W相的电流相同。
在图中点B的位置,只有U相的下臂处于打开状态,如右侧蓝色矩形所示。在此情况下,流经单电阻的电流与流经U相的电流相同。
剩下的V相电流可以使用基尔霍夫第一定律通过上述相电流来计算。
因此,测量A和点B即可测量三相电流。
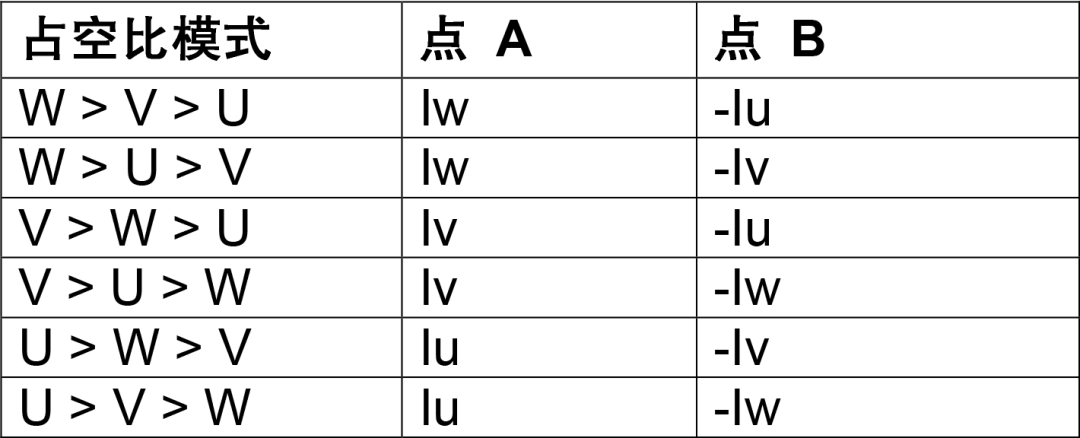
图3-5所示情况为占空比模式W>V>U。每相PWM输出将执行六种占空比模式。在点A和点B测量的电流根据占空比模式而变化,因此有必要为每相分配计算的电流。由于各个相位关系在每次计算PWM占空比时都可获知,因此可以进行电流分配。
表3-6 占空比模式与相电流之间的关系
2、使用RA6T2功能的分流电阻电流测量方法
当按照①所述采用单电阻测量电流时,需要根据PWM占空比设置来控制A/D转换器的转换时间。在示例软件中,这是由RA6T2 GPT模块的GTADTRA和A/D转换开始请求功能,通过GTADTRB寄存器与GTCNT计数器的比较匹配来实现的。
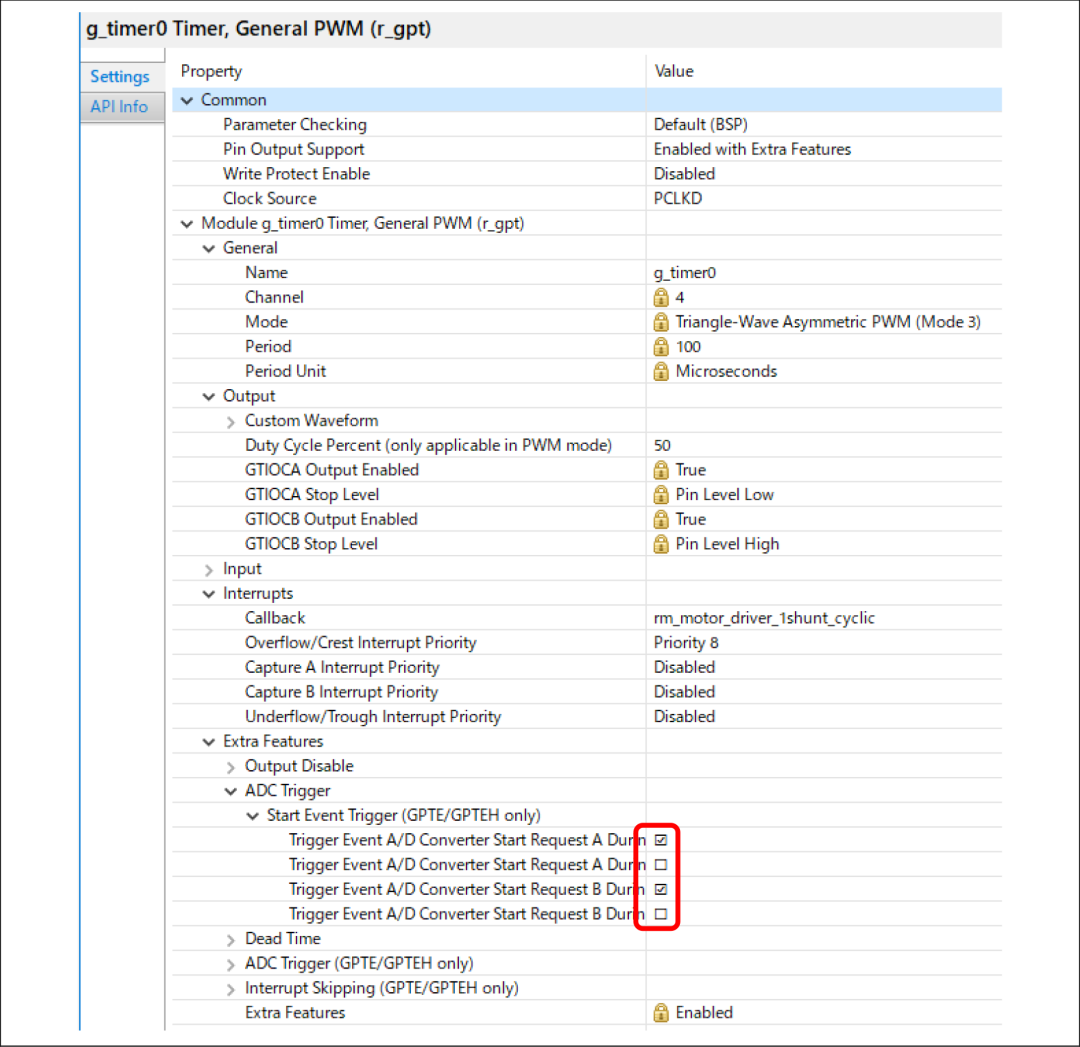
图3-6 GPT ADC触发器设置 (FSP 3.5.0)
3、占空比调整
如果确保①中所示的时序,则通过一个分流电阻即可检测电流,但是不能根据运行期间的PWM占空比设置条件来确保足够的转换时间。因此,无法正确获得电流值。以下两种测量用于无法确保时间的情况。
● 当两个相位的开关时序彼此接近时
当两个相位的开关时序彼此接近并且无法确保A/D转换时间时,PWM占空比不变,A/D转换需要将相位开关时序延后。转换时间只能通过偏移来保证。
● 当无法实现时序偏移时
如果PWM开关时序如上所述延迟,则占空比加宽,如果达到PWM载波周期的终点,则时序无法延迟。此时,调制系数近似为1,因此应将调制系数限制为使PWM开关时序位于载波周期的终点。
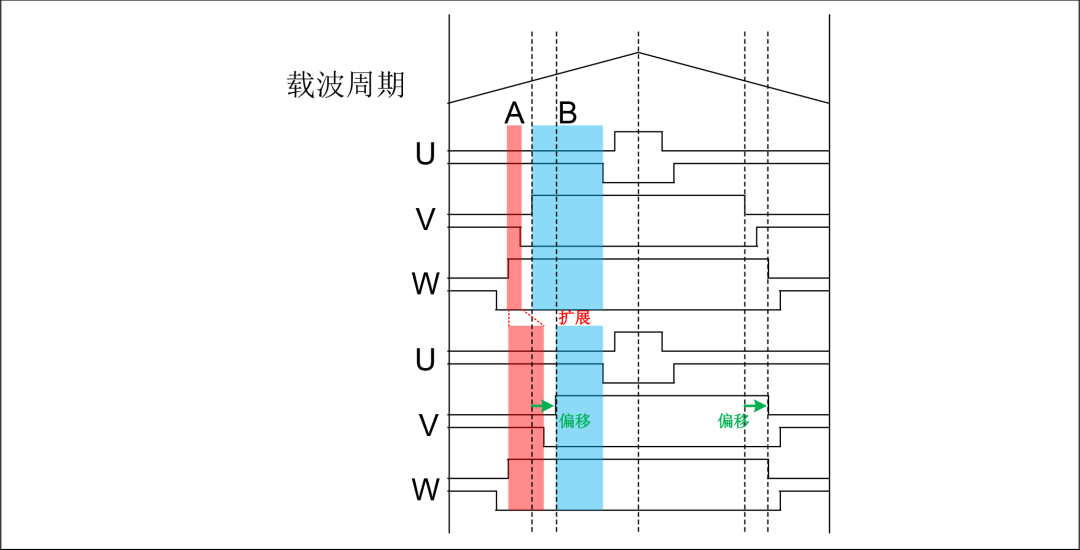
图3-7 占空比调整
3.1.8 AD触发器
显示AD触发器时序和扫描组。
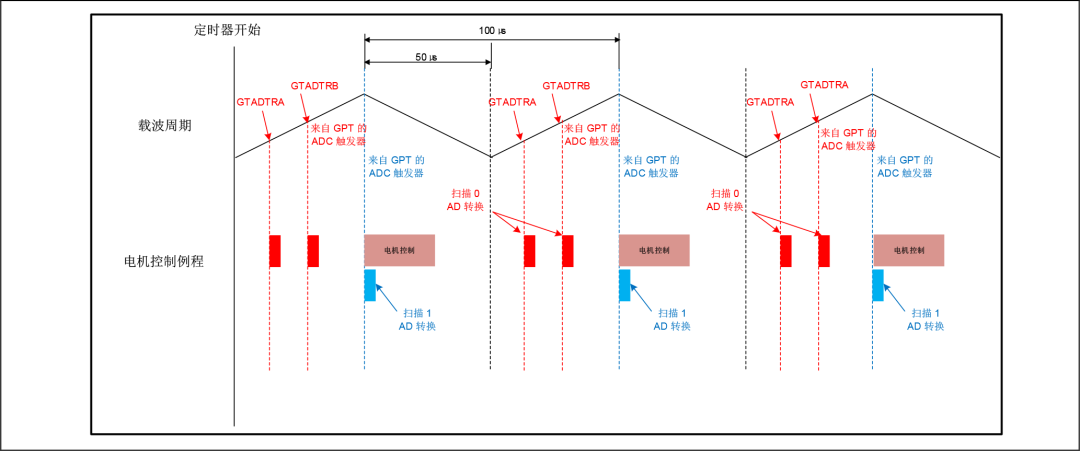
图3-8 AD触发器时序
3.2 无传感器矢量控制软件的函数规范
本应用笔记的目标软件的控制过程主要由100[µs] 周期中断(载波中断)和500[µs] 周期中断组成。如下面的图3-9和图3-10所示,用红色虚线表示的控制过程以100[µs] 为周期执行,蓝色虚线表示的控制过程以500[µs] 为周期执行。
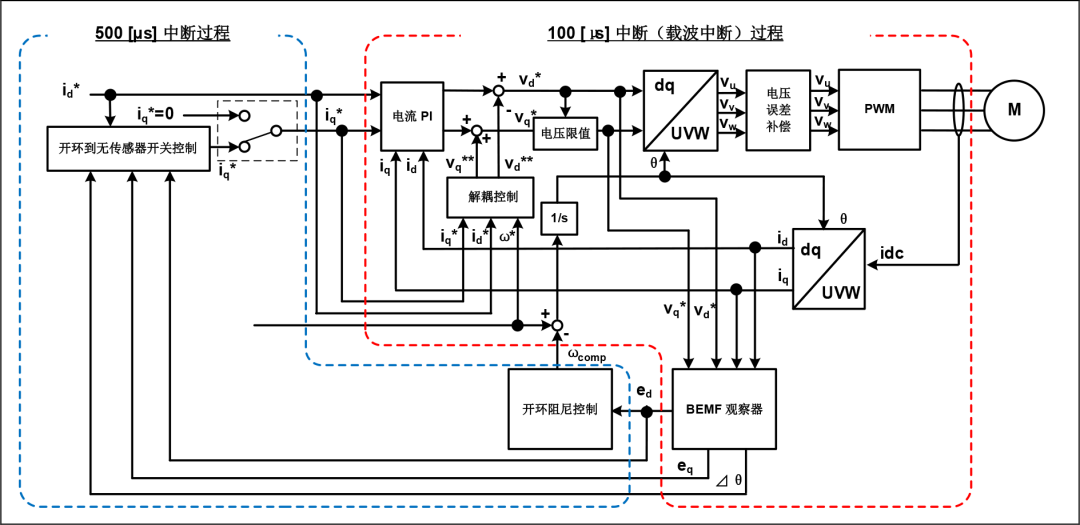
图3-9 无传感器矢量控制(开环控制)框图
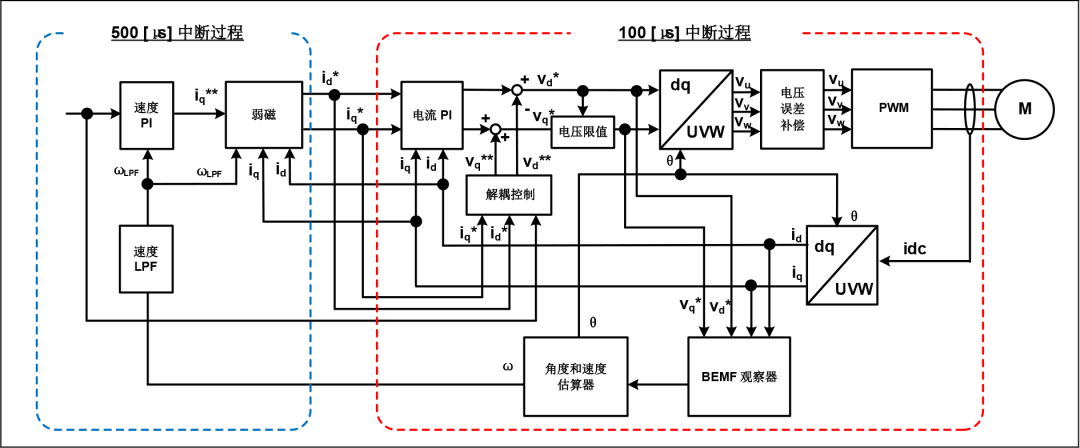
图3-10 无传感器矢量控制(无传感器控制)框图
本节介绍2个中断函数的规范以及在每个中断周期内执行的函数。下表仅列出了无传感器矢量控制的主要函数。有关表中未列出的函数规范,请参见源代码。
表3-7 100[µs] 周期中断内执行的函数的列表 (1/4)
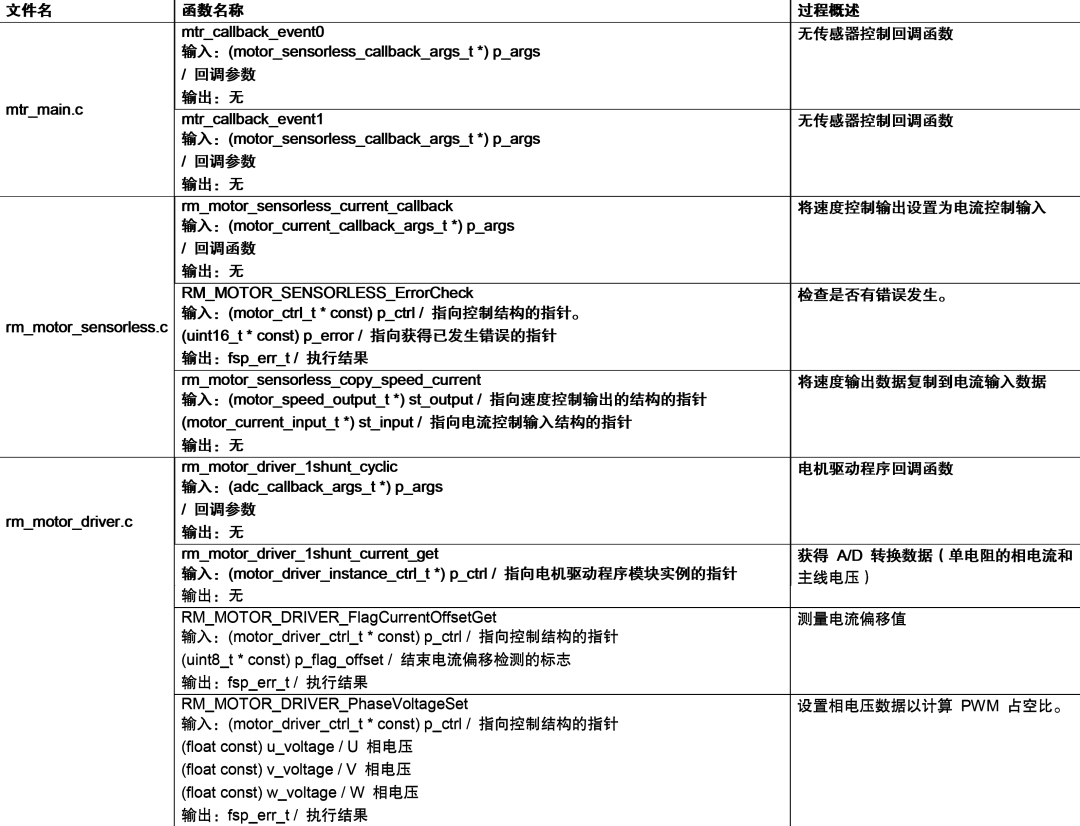
表3-8 100[µs] 周期中断内执行的函数的列表 (2/4)
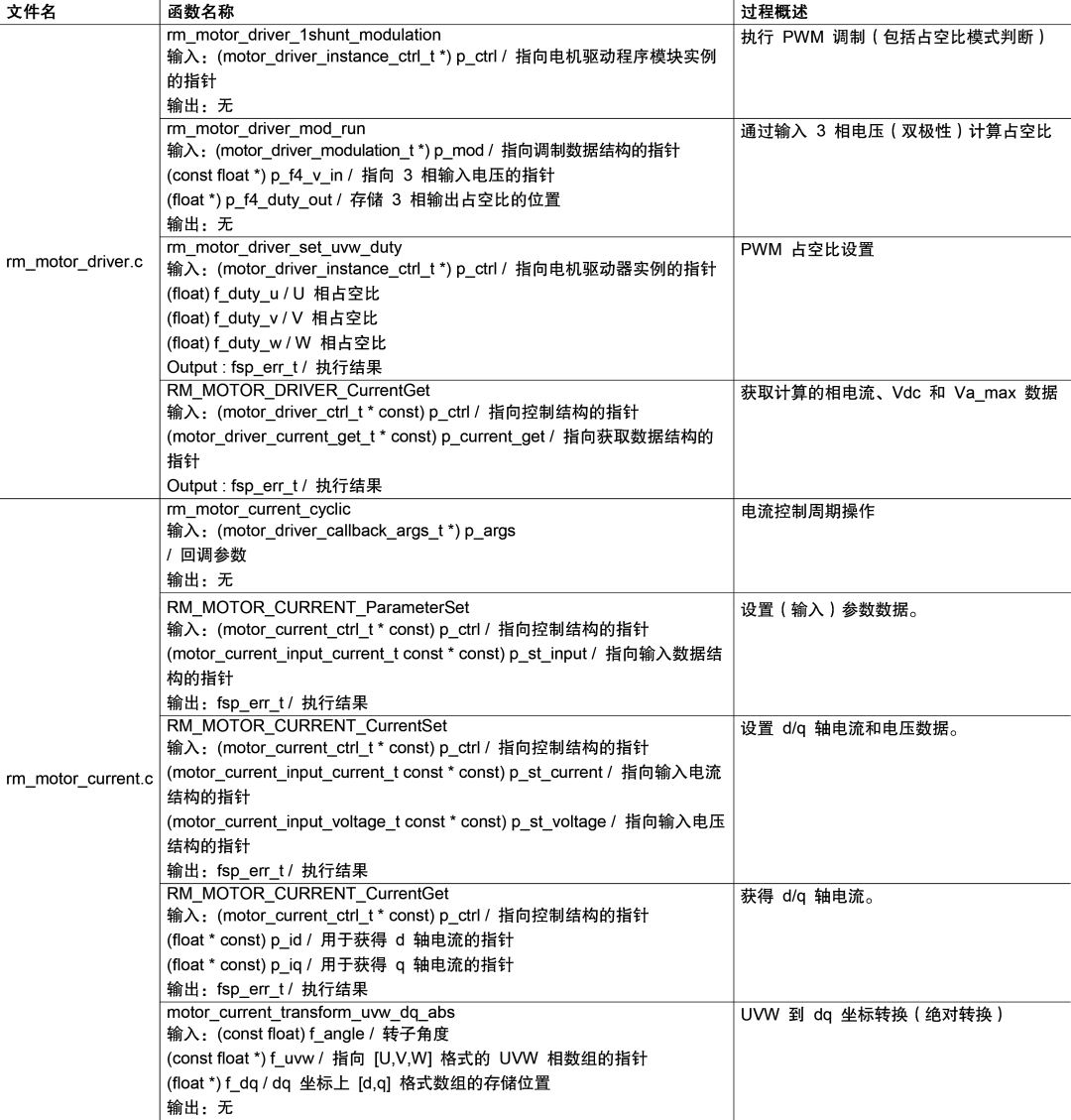
表3-9 100[µs] 周期中断内执行的函数的列表 (3/4)
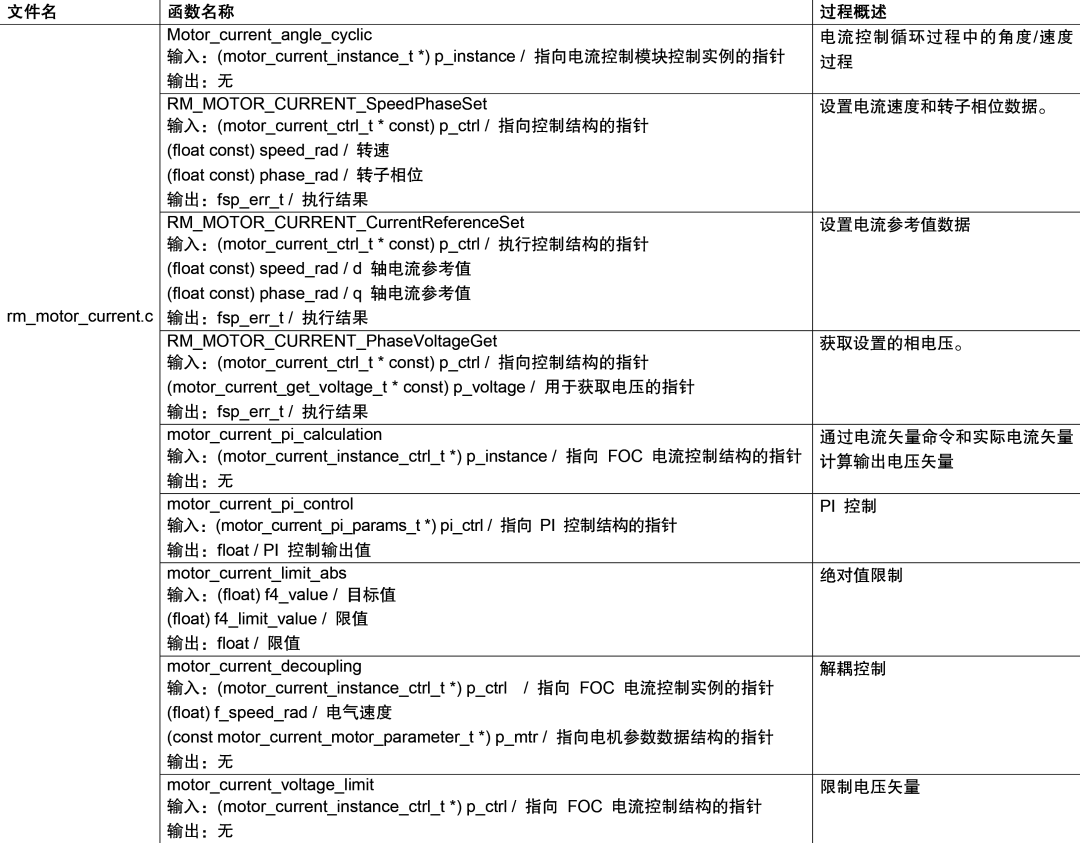
表3-10 100[µs] 周期中断内执行的函数的列表 (4/4)

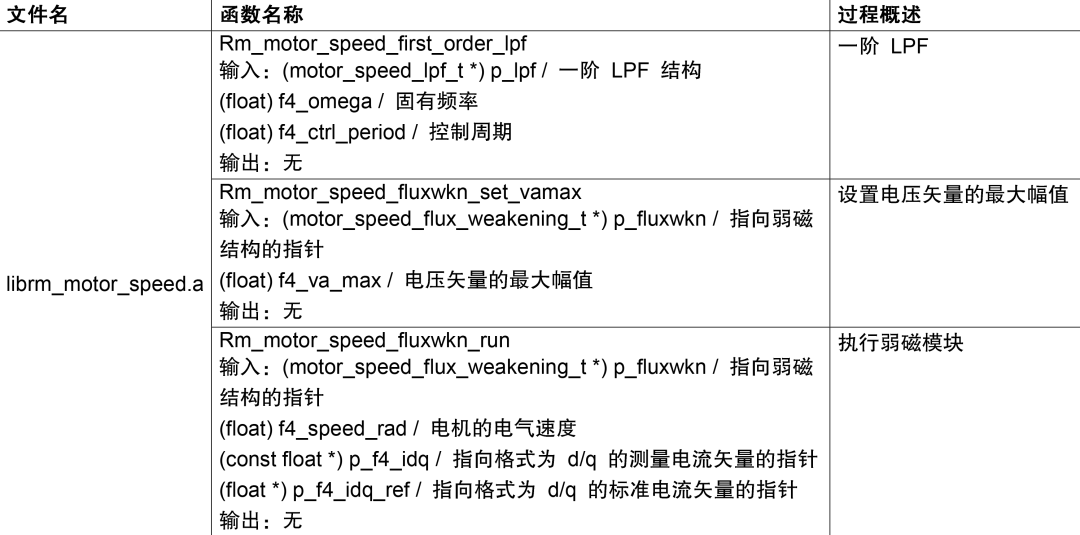
表3-11 500[µs] 中断内执行的函数的列表 (1/2)
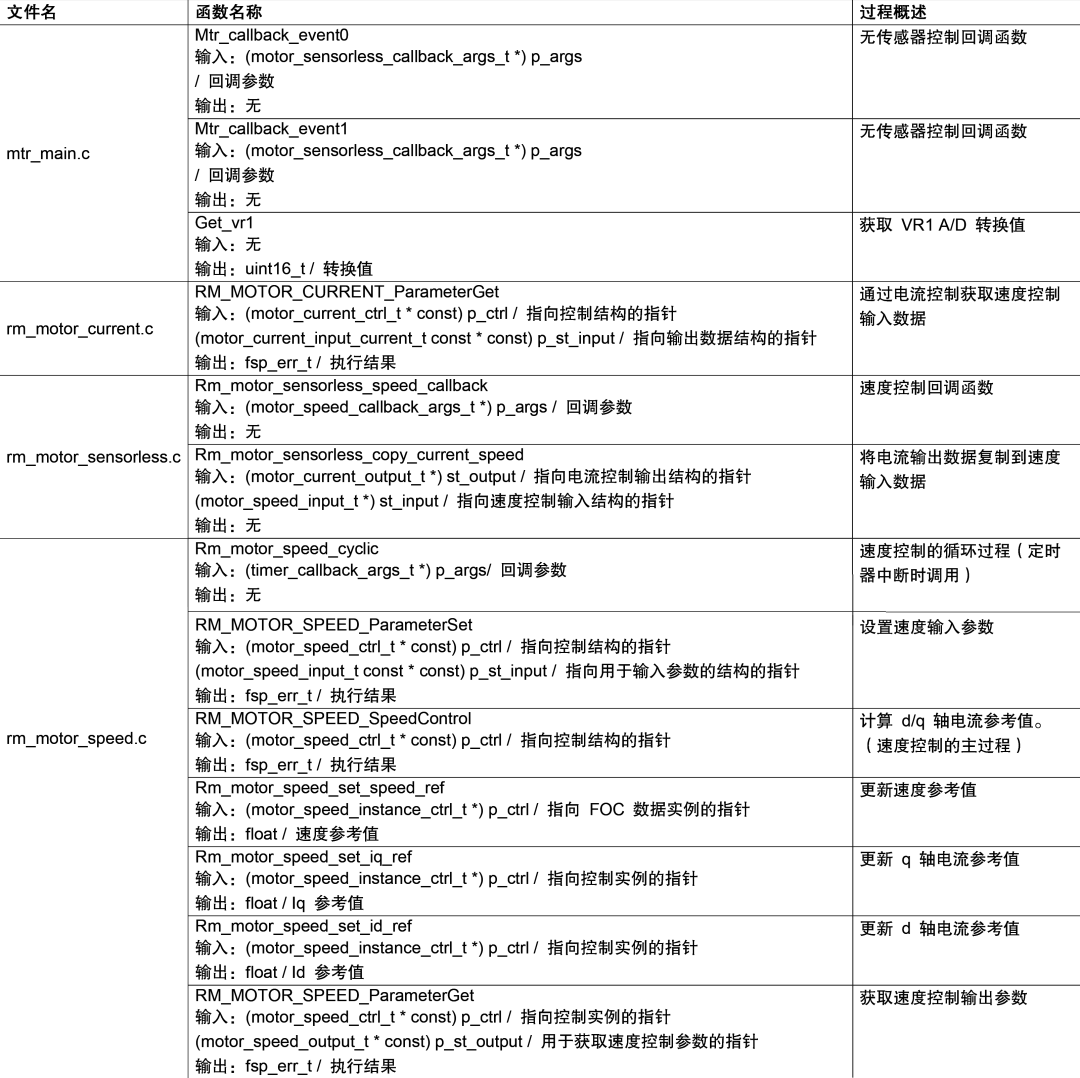
表3-12 500[µs] 中断内执行的函数的列表 (2/2)
未完待续_
-
Renesas MCK - RA6T2电机控制评估套件:设计与应用全解析2025-12-30 580
-
RA6T2的16位模数转换器操作 [7] 配置RA6T2 ADC模块 (4)2024-04-20 1668
-
RA6T2的16位模数转换器操作 [5] 配置RA6T2 ADC模块 (2)2024-04-04 1656
-
RA6T2的16位模数转换器操作 [4] 配置RA6T2 ADC模块 (1)2024-03-29 1552
-
RA6T2无传感器矢量控制应用笔记 [完结篇] 评估环境说明 (2)2023-10-10 1875
-
RA6T2无传感器矢量控制应用笔记 [6] 评估环境说明 (1)2023-09-22 1317
-
RA6T2无传感器矢量控制应用笔记 [2] 系统概述2023-08-19 1268
-
RA6T2无传感器矢量控制应用笔记 [5] 控制程序描述 (3)2023-05-26 1720
-
RA6T2无传感器矢量控制应用笔记 [4] 控制程序描述 (2)2023-05-25 2555
-
RA6T2无传感器矢量控制应用笔记 [3] 控制程序描述 (1)2023-05-22 1640
-
RA6T2无传感器矢量控制应用笔记 [1] 概述2023-05-17 2172
-
RX23T永磁同步电动机无传感器矢量控制应用说明和控制程序资料2019-01-15 1406
全部0条评论

快来发表一下你的评论吧 !
