

液压伺服系统如何选用控制阀?
工业控制
描述
对于液压伺服系统来说,保持机构的高速度和高精度是系统设计的基本条件。为了实现这一要求,该如何选用控制阀?
01阀的尺寸
使用线性执行机构时,从应用所需的行程长度和运动时间角度,系统设计人员应先从确定缸径大小入手。
首先关注缸径,是为了保证充分的动态响应以满足加速和减速的需要。确定缸径,通常还需要计算所需的系统压力。第二步一般是选择阀的大小尺寸(额定流量),一旦计算出正确的缸径,这步便相对简单。 需要注意的是,伺服阀和伺服比例阀的压降通常是70bar (1015 psi),而其它比例阀通常压降是10 bar (145psi)。两者之间差别很明显——70 bar压降时的流量是10 bar时的2.65倍。但是液压阀在每个尺寸范围内通常有许多功能选项,所以选择正确的阀不仅要考率通径大小,还得参考其它相关参数。
02阀的选型
选用伺服阀还是比例阀?两者的主要区别是驱动阀芯移动的方式。比例阀使用电动线圈和磁铁,与典型的音频扬声器所用的音圈(发音线圈)类似,属于直接驱动阀芯。
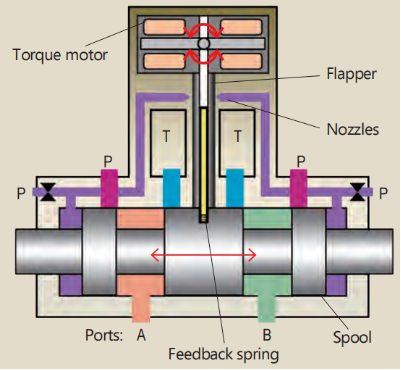
典型液压伺服阀内部结构
而伺服阀则是使用小型力矩马达驱动液压油路,依靠液压力带动阀芯运动(先导控制)。 伺服阀和比例阀响应速度上的差异主要是由于作用在阀芯的驱动力不同所引起的。由于伺服阀的液压力与阀芯质量的比例关系,伺服阀的响应速度一般要快于比例阀(尽管有些比例阀已接近伺服阀的响应时间了)。比例阀必须输出足够的力来推动阀芯、内置的LVDT和电磁线圈,还要来克服弹簧的置中力。
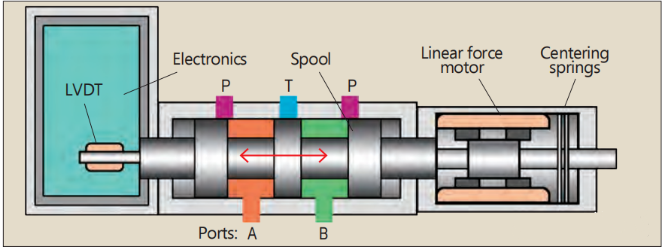
典型比例阀内部结构 先导伺服阀加工精度高,结构中设计有小孔径的先导控制油口,使得这类伺服阀的价格更高,同时更容易被污染。在许多实际应用中,这些缺点使人们更倾向于使用比例阀。不过伺服阀仍有自身的市场。例如在大流量工况下,由于系统压力可以用来驱动阀芯并克服液动力,伺服阀性能更好。在这些工况下,因为伺服阀响应更快,响应的线性特性更好(因此便于操纵),伺服阀是更安全的设计选择,而且其运作也更高效。 在某些工况下,比例阀无法提供足够的力来克服大流量下产生的液动力(伯努利力)。
此时,阀会瞬时失控,直至液动力下降为止。在出现故障时,在排除故障时,人们常常倾向于怀疑控制装置而不是阀本身有问题。这时使用示波器等诊断工具来记录控制信号波形、阀芯位移、以及执行机构的位移等参数,就会很有价值。 我们可以使用多级阀来解决与液动力有关的问题,用小型先导阀的液流来控制主阀阀芯的位移。但由于存在相位延时,多级控制阀价格较高,控制环节更多,响应时间也往往更长。不过为了使主阀芯快速运动,大型阀需要的力要比单靠电磁线圈提供的力要大。这种情况下,先导阀通过导入油压来直接而快速地推动主阀芯,从而增强系统的性能。
03比例阀放大器
比例阀需要放大器将控制器的控制输出电压信号转换成大电流信号,以驱动阀芯。在伺服比例阀中,放大器使用阀中的LVDT位置反馈装置校正控制信号与实际位置之间的误差。为此,控制信号与反馈信号之间的偏差信号需要经过一个电子伺服放大器。有些伺服放大器使用简单的比例控制,而另一些则使用PI或PID控制方式。如果放大器调试不精确,液压阀的性能会因此受损。在采购时最好能购买自带电子配套的比例阀,以确保放大器调试的最佳状态。当然也可以单独购买放大器卡,但是这需要额外的努力和如何调试放大器增益的知识,使阀芯可以对控制信号作出快速响应。
04封闭中心阀芯
非线性滑阀有许多种,也有许多名称。最常见的是封闭中心阀芯,又称正重叠或负开口阀芯,它有明显的“死区” 或零收益区。原因是在控制电流较小的情况下,不会有液压油通过阀口,如下图所示。
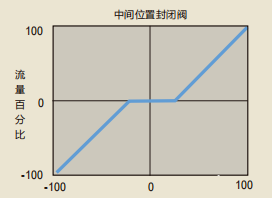
控制% 负开口阀的工作特性曲线 封闭中心阀芯泄漏小,手动控制时便于关闭。但用于压力及位置控制时则成为糟糕的选择,因为阀芯必须非常迅速地通过中心位置才能提供良好的压力或位置控制。死区面积越大,阀芯通过死区的移动时间就越长。在这几毫秒之内,阀基本无流量,导致输入到控制器中的位置和压力信号无变化。这种反馈信号的不连续性降低控制器对位置或压力控制的精确性。因此封闭中心阀芯仅应用在不要求阀芯快速通过死区的工况下,或者不需要阀芯作频繁快速的换向运动的情况之下。封闭中心阀芯常应用于速度控制系统中,如传送带、输送机气等。
05阀芯的选择
比例阀因其阀芯位移与控制电流强度呈正比而得名,但是流量却不一定成比例。比例阀有许多不同的阀芯类型,选择合适的阀芯,是保证系统性能最优化的关键。从位置控制和压力/力控制角度出发,应选用比例伺服阀芯或轴向开口阀芯。这些阀芯可以输出与控制信号成比例的流量,前提是阀门两端之间的压差要保持恒定。
06双重增益或变增益阀芯
此滑阀具有随控制信号强度变化而改变增益的功能。这些阀在控制信号接近零时流量增益很低,而在控制信号接近正、负最大值时流量增益较高,如下图所示。
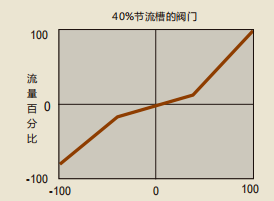
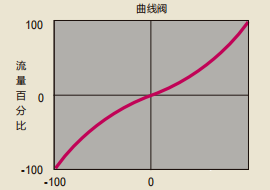
40%节流槽阀
曲线阀 阀的工作特性曲线 节流槽阀或双增益阀有明显的低增益区和高增益区,而曲线阀的流量增益是连续变化的。在手动系统中,这种结构的阀芯在缓慢运动下控制精细,而高速运动时又能提供很大的流量。非线性阀使整个液压系统具有非线性,尽管这在手动控制及开环控制中不是问题,但应用非线性阀实现闭环控制十分困难。当阀芯在高增益区与低增益区之间切换时,闭环控制器必须实时调整它的增益。在理论上该阀的线性化(作为所述控制信号的函数的不同的增益补偿),可通过运动控制器使用补偿表或特定的补偿方程来实现。但这种补偿方法要与特定的阀的特性相匹配,限制了这种方法的实用性。节流槽液压阀在低速闭环控制的液压系统中表现良好。在高速工况下这种阀在高增益区运作,可应用于开环控制或手动控制。这样当阀芯在高、低增益区之间滑动时,闭环控制器不必实时改变它的增益。不过,对于大多数位置和压力控制的应用来说,最好是避免节流槽阀或非线性阀。
07伯德图
学会看伯德图有助于选择合适的液压阀。伯德图用对数标度,来显示作为控制信号频率的函数的阀芯的幅频响应和相位滞后特性曲线。通常情况下,幅频响应在最初几个赫兹(Hz)时相对平坦,一旦控制信号频率上升到一定值时,幅频响应会骤然减小。同样,相频响应滞后在低频率时变化不大,但在高频率下会迅速增加。我们将相位滞后90°时的频率定义为阀的额定频率。在该频率下,幅频响应往往下降到大约-6db或者初始幅度一半的位置。从正弦测试的伯德图曲线可以看出,在10Hz下没有明显增益下降及相位滞后上升的设备,在40Hz时阀的幅频响应可能只有之前的一半,从而无法可靠工作。运动控制器可以通过前馈增益来补偿阀的增益损失和相角滯后。在较高频率下,控制器必须通过增大控制信号来补偿阀增益的衰减,但是运动控制器无法生成比100%更强的信号。因此,设计者必须为系统中这部分多出的控制信号留有足够的上升空间,或者选用较高频率的阀,使得阀在系统的频段范围内仅有很小的增益衰减和相位滞后。
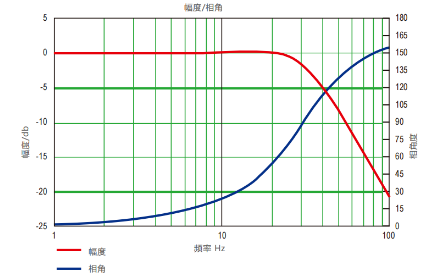
典型伯德图,图为阀芯关于控制电流频率的幅频特性曲线和相频特性曲线
08阀的响应及阀性能评定
液压阀制造商提供的阀性能伯德图的曲线并不是在相同条件下绘制的。不同的制造厂商可能按不同的阀芯行程幅度来标定他们的阀。控制信号在最大值的100%时的阀芯响应,要远比控制信号在5%时的响应差得多。这意味着响应同时标定为30Hz的两个阀,如果一个在5%控制信号下评定,另一个在50%控制信号下评定,其性能上可能相差很多。许多伯德图都是在控制信号为最大信号的5%至25%的正弦信号下绘制的性能曲线。在5%最大信号下性能优异的阀适用于控制信号在0%处波动的场合,比如说位置或压力控制。但这种阀不适用于高速控制的场合,因为阀芯的必要行程几乎达到了100%。
一个保险的规则是,将控制流量从0到100%时取得的上升时间乘以4并求倒数,就可以得到阀的全行程响应频率。高性能的位置/压力控制系统需要响应迅速的线性阀。当然,阀的性能不可能十全十美,所以仍然需要高性能的控制器来提供对阀的响应时间、阀芯自身质量、执行机构的负载、以及弹簧效应的补偿。为了充分实现一个精心设计的系统的最佳性能,应选用针对液压而设计的运动控制器,配备有能分别调节液压缸伸出和缩回时的增益、位置/压力控制、以及与线性位移传感器直接相连等功能。 在开始对运动控制器选型和编程之前,首先应该仔细考虑和分析液压元件的选型以及其尺寸参数。选择正确的阀并不总是如想像或希望的那么容易。阀的性能评定缺乏标准化,给我们比较阀的性能带来困难。对于位置和压力控制,应选用零开口阀(零重叠的线性阀芯)。对于那些不要求阀芯在零位精确动作的场合,滑阀上的部分死区是允许的;但是,在它的其余运动区域内,通过阀口的流量应与控制信号的强度保持线性关系。
审核编辑:黄飞
-
液压伺服系统的工作特性及原理2012-02-09 9107
-
液压伺服系统的组成_液压伺服系统的优缺点2018-06-04 13519
-
液压控制阀的作用2019-01-08 23634
-
各种方向控制阀的原理图2019-05-13 8013
-
多种控制阀的性能及应用分析2019-07-06 2551
-
液压控制阀的原理及分类2019-07-04 6531
-
液压伺服系统有几种类型_液压伺服系统的应用2021-02-19 6324
-
液压控制阀的基本工作原理2021-02-20 21434
-
液压控制阀的分类及工作原理2021-07-30 8149
-
新型伺服液压机的优势介绍2021-08-17 2902
-
机电伺服系统有哪些_机电伺服系统工作原理2023-03-07 3016
-
电液伺服阀作用_电液伺服阀选型2023-03-12 4919
-
控制阀的定义是什么2023-06-02 3305
-
液压伺服系统选用控制阀的方法介绍2023-11-06 2309
-
液压伺服控制系统的控制要求2024-06-05 2438
全部0条评论

快来发表一下你的评论吧 !
