

凌华科技基于软件控制的EtherCAT运动控制器
描述
应用背景
固晶机用于IC制造的封测阶段,是封测的芯片贴装环节中最关键、最核心的设备。其作用是将晶粒从已经切割好的晶圆上抓取下来,并安置在基板对应的位置上,利用银胶把晶粒和基板粘接起来。IC固晶机可以实现高速、高精度地贴放晶粒,并同时完成定位、对准、倒装、连续贴装等关键步骤。
固晶设备多采用脉冲控制卡作为运动控制的核心,如:摆臂的往复运动、顶针的上下动作、吸嘴的上下运动、晶圆以及基板的移动等,通常使用的脉冲卡的数量较多。随着EtherCAT产品在市场的应用逐渐增多,越来越多的厂商都在转向使用EtherCAT总线控制产品。
SuperCAT产品概述
SuperCAT是凌华科技打造的基于软件控制的EtherCAT运动控制器,其核心的控制软件来自于凌华二十多年运动控制经验的积累,整合了凌华脉冲卡和EtherCAT总线卡的所有功能,系统通讯周期相比硬件的EtherCAT总线卡得到了大幅提升,同时可以满足更多轴数的应用需求。
SuperCAT产品特性:
• 具备EtherCAT主站功能
• 运动控制周期高达125us
• 最多支持128轴运动控制
• 最低 API 延迟<10us
• APS SDK 支援
• MotionCreatorPro2 支援
• 支持开发语法 C#, .NET, C/C++, Python, Java…etc
• 支援多任务与实时程序运行
IC固晶设备的需求:
1) 点位运动功能。
2) 程序下载功能。
SuperCAT解决方案:
该设备的核心运动控制单元采用SuperCAT主控软件,搭配凌华工业电脑,可以将原有的脉冲卡进行替代,除了可以降低了设备的购置成本以及后期维护的费用外,相比于EtherCAT卡片类产品,可以极大提升总线通讯的速率,从而在设备运行中更好的实现运动速度的规划。
1) 点位运动功能,用到的函数和语法如下,
APS_ptp
Syntax:
C/C++:
I32 APS_ptp( I32 Axis_ID, I32 Option, F64 Position, ASYNCALL *Wait);
Visual Basic:
APS_ptp(ByVal Axis_ID As Long, ByVal Option As Long, ByVal Position As Double, Wait As ASYNCALL) As Long
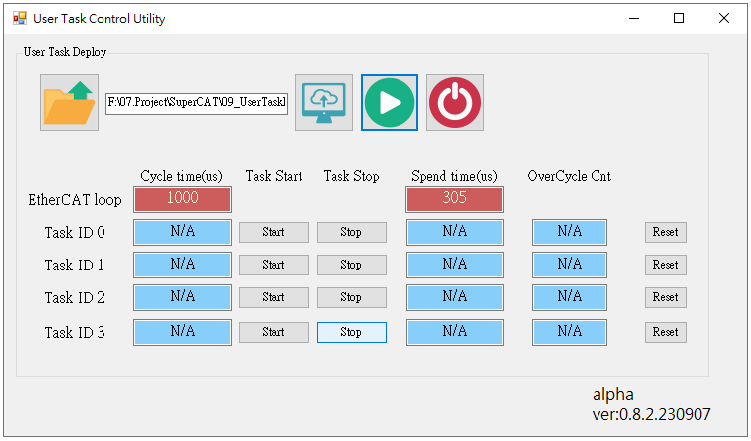
2) 程序下载功能,
SuperCAT提供支持Visual Studio编译的程序下载功能,对于设备部分固定动作的程序,为了节省运行周期,可以通过Visual Studio对这部分程序进行编译,并下载到实时系统中运行。对于SuperCAT所有的软件版本,该功能都支持,这也极大增加了用户使用的便利性。
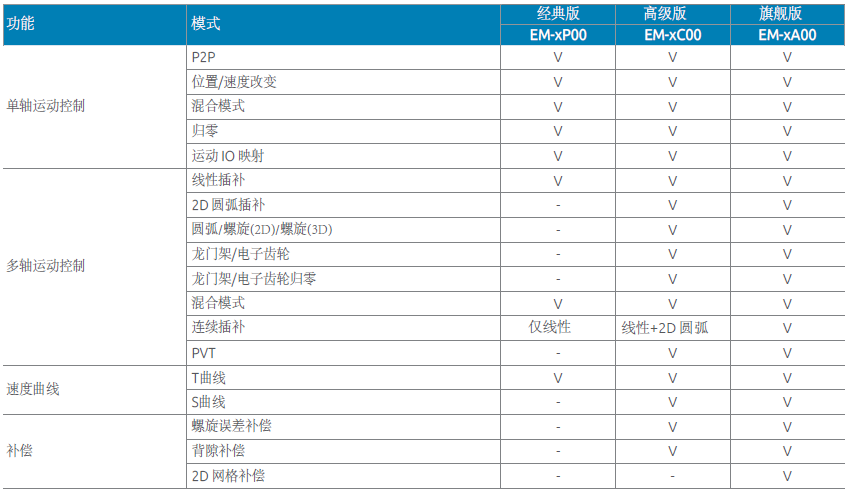
3)凌华科技SuperCAT运动控制器可以提供不同版本的软件功能,用于满足市场所需的多种应用,
审核编辑:黄飞
-
LabVIEW运动控制(五):EtherCAT运动控制器的心跳检测功能 #正运动技术 #运动控制器 #正运动正运动技术 2025-05-13
-
LabVIEW运动控制(一):EtherCAT运动控制器的SCARA机械手应用 #正运动技术 #运动控制器正运动技术 2025-01-09
-
什么是EtherCAT运动控制器?它有哪些特点?2024-06-12 2393
-
EtherCAT运动控制器在ROS上的应用(上)2024-03-06 2432
-
全国产EtherCAT运动控制边缘控制器(五):IO配置与回零运动的Python+Qt开发2023-10-22 2438
-
EtherCAT运动控制边缘控制器ZMC432H的轴参数配置和单轴运动控制2023-10-16 2650
-
全国产EtherCAT运动控制边缘控制器(一):ZMC432H硬件接口2023-08-03 2669
-
全国产EtherCAT运动控制边缘控制器-ZMC432H2023-07-29 2099
-
经济型EtherCAT运动控制器:EtherCAT总线快速入门2023-05-11 2024
-
正运动技术运动控制器EtherCAT总线的基础使用2021-09-27 7225
-
EtherCAT总线运动控制器应用进阶一2021-09-22 6008
-
正运动技术运动控制器EtherCAT总线快速入门2021-09-07 2791
-
EtherCat控制器2021-09-01 1351
-
EtherCAT总线运动控制器硬件是如何进行接线的?2021-07-15 7615
全部0条评论

快来发表一下你的评论吧 !
