

激光SLAM:Faster-Lio算法编译与测试
描述
来源:古月居
前言
Faster-LIO是基于FastLIO2开发的。FastLIO2是开源LIO中比较优秀的一个,前端用了增量的kdtree(ikd-tree),后端用了迭代ESKF(IEKF),流程短,计算快。Faster-LIO则把ikd-tree替换成了iVox,顺带优化了一些代码逻辑,实现了更快的LIO。在典型的32线激光雷达中可以取得100-200Hz左右的计算频率,在固态雷达中甚至可以达到1000-2000Hz,能够达到FastLIO2的1.5-2倍左右的速度。当然具体数值和计算平台相关。
FasterLIO使用了一种基于稀疏体素的近邻结构iVox(incremental voxels)。我们会发现这种结构用来做LIO更加合适,可以有效的降低点云配准时的耗时,也不会影响LIO的精度表现。
iVox也可以被集成到其他LO或LIO里,但是大部分方案里,最近邻并不是主要的计算瓶颈,gtsam/ceres什么的耗时相比最近邻那可太多了。、把iVox集成到Lego-LOAM里,、主要只是省了增量地图构建那部分时间,优化方面没什么变化(点少)。所以iVox与FastLIO倒是相性更好一些。
编译
部署系统:ubuntu20.04
ROS版本: noetic
github 地址:https://github.com/gaoxiang12/faster-lio
下载源码
git clone https://github.com/gaoxiang12/faster-lio
正克隆到 ‘faster-lio’…
remote: Enumerating objects: 224, done.
remote: Counting objects: 100% (108/108), done.
remote: Compressing objects: 100% (43/43), done.
remote: Total 224 (delta 76), reused 65 (delta 65), pack-reused 116
接收对象中: 100% (224/224), 38.13 MiB | 1.49 MiB/s, 完成.
处理 delta 中: 100% (97/97), 完成.
将原文件拷入ros工作空间
依赖
•ROS (melodic or noetic)
•glog: sudo apt-get install libgoogle-glog-dev
•eigen: sudo apt-get install libeigen3-dev
•pcl: sudo apt-get install libpcl-dev
•yaml-cpp: sudo apt-get install libyaml-cpp-dev
编译
catkin_make
报错1:
CMake Error at /home/jk-jone/jone_ws/build/livox_ros_driver/livox_ros_driver/cmake/livox_ros_driver-genmsg.cmake:14 (add_custom_target):
add_custom_target cannot create target “livox_ros_driver_generate_messages”
because another target with the same name already exists. The existing
target is a custom target created in source directory
“/home/jk-jone/jone_ws/src/faster-lio/thirdparty/livox_ros_driver”. See
documentation for policy CMP0002 for more details.
Call Stack (most recent call first):
/opt/ros/noetic/share/genmsg/cmake/genmsg-extras.cmake:307 (include)
livox_ros_driver/livox_ros_driver/CMakeLists.txt:46 (generate_messages)

如果工作空间中之前编译了 livox_ros_driver 的功能包,则需要删掉 faster-lio/thirdparty/livox_ros_driver 这个文件夹
再次编译
CMake Error at faster-lio/CMakeLists.txt:15 (add_subdirectory):
add_subdirectory given source “thirdparty/livox_ros_driver” which is not an
existing directory.

因为把那个文件删了,所以找不到路径
将 faster-lio/CMakeLists.txt 文件的第15行注释掉
add_subdirectory(thirdparty/livox_ros_driver) 改为 #add_subdirectory(thirdparty/livox_ros_driver)
再次编译
[100%] Linking CXX shared library /home/jk-jone/jone_ws/devel/lib/libfaster_lio.so
[100%] Built target faster_lio
Scanning dependencies of target run_mapping_offline
Scanning dependencies of target run_mapping_online
[100%] Building CXX object faster-lio/app/CMakeFiles/run_mapping_online.dir/run_mapping_online.cc.o
[100%] Building CXX object faster-lio/app/CMakeFiles/run_mapping_offline.dir/run_mapping_offline.cc.o
[100%] Linking CXX executable /home/jk-jone/jone_ws/devel/lib/faster_lio/run_mapping_online
[100%] Built target run_mapping_online
[100%] Linking CXX executable /home/jk-jone/jone_ws/devel/lib/faster_lio/run_mapping_offline
[100%] Built target run_mapping_offline

编译成功
测试
Faster-lio支持离线的测试与在线测试
离线测试
首先下载rosbag数据包到电脑
avia bags(https://drive.google.com/drive/folders/1YL5MQVYgAM8oAWUm7e3OGXZBPKkanmY1?usp=sharing)
nclt bags(https://drive.google.com/drive/folders/1VBK5idI1oyW0GC_I_Hxh63aqam3nocNK)
百度云盘下载地址:
BaiduYun: https://pan.baidu.com/s/1ELOcF1UTKdfiKBAaXnE8sQ?pwd=feky access code: feky
OneDrive下载地址:
OneDrive:https://1drv.ms/u/s!AgNFVSzSYXMahcEZejoUwCaHRcactQ?e=YsOYy2
Call run_mapping_offline with parameters to specify the bag file and the config file like:
通过下面的指令 运行 run_mapping_offline 文件 并且加载对应的rosbag文件 和对应的配置文件
./build/devel/lib/faster_lio/run_mapping_offline --bag_file your_avia_bag_file --config_file ./config/avia.yaml
其中 your_avia_bag_file 路径需要更换为下载的数据包路径
同样对于nclt数据包可以运行下面的指令。数据是机械式激光雷达velodyne的数据
./build/devel/lib/faster_lio/run_mapping_offline --bag_file your_nclt_bag_file --config_file ./config/velodyne.yaml
your_nclt_bag_file 路径需要更换为下载的数据包路径
运行FasterLIO,然后退出的时候 会在终端打印FPS和time
像下面这样:
I0216 17:16:05.286536 26492 run_mapping_offline.cc:89] Faster LIO average FPS: 1884.6 I0216 17:16:05.286549 26492 run_mapping_offline.cc:91] save trajectory to: ./src/fast_lio2/Log/faster_lio/20120615.tum I0216 17:16:05.286706 26492 utils.h:52] >>> ===== Printing run time ===== I0216 17:16:05.286711 26492 utils.h:54] > [ IVox Add Points ] average time usage: 0.0147311 ms , called times: 6373 I0216 17:16:05.286721 26492 utils.h:54] > [ Incremental Mapping ] average time usage: 0.0271787 ms , called times: 6373 I0216 17:16:05.286731 26492 utils.h:54] > [ ObsModel (IEKF Build Jacobian) ] average time usage: 0.00745852 ms , called times: 25040 I0216 17:16:05.286752 26492 utils.h:54] > [ ObsModel (Lidar Match) ] average time usage: 0.0298004 ms , called times: 25040 I0216 17:16:05.286775 26492 utils.h:54] > [ Downsample PointCloud ] average time usage: 0.0224052 ms , called times: 6373 I0216 17:16:05.286784 26492 utils.h:54] > [ IEKF Solve and Update ] average time usage: 0.342008 ms , called times: 6373 I0216 17:16:05.286792 26492 utils.h:54] > [ Laser Mapping Single Run ] average time usage: 0.530618 ms , called times: 6387 I0216 17:16:05.286800 26492 utils.h:54] > [ Preprocess (Livox) ] average time usage: 0.0267813 ms , called times: 6387 I0216 17:16:05.286808 26492 utils.h:54] > [ Undistort Pcl ] average time usage: 0.0810455 ms , called times: 6375 I0216 17:16:05.286816 26492 utils.h:59] >>> ===== Printing run time end =====
默认点云会以pcd文件的格式保存下来
在线测试
用之前建立的仿真环境下的 mid360雷达的数据进行一个初步在线测试
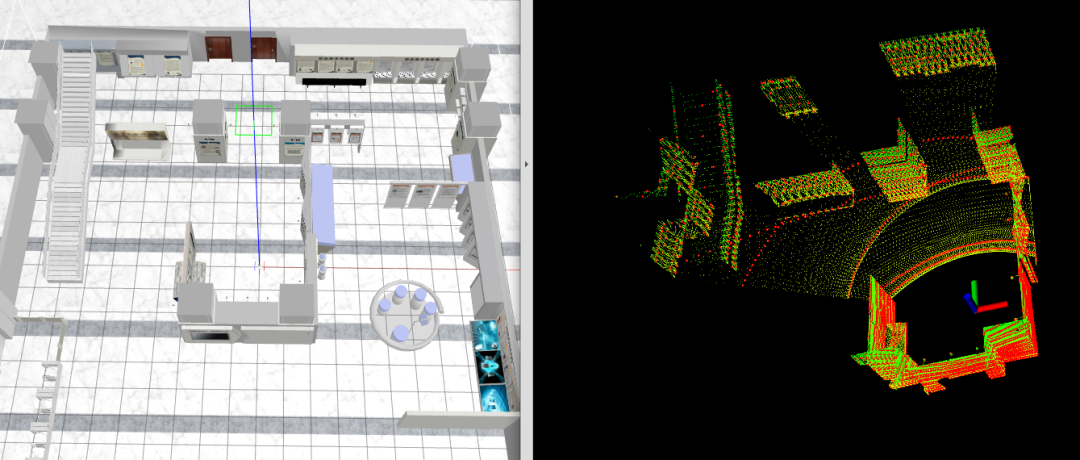
打开仿真环境
faster-lio 里面没有 mid360 雷达的 配置文件和启动文件 ,有avia的,都是livox的固态雷达,基本雷达,仿照avia的写一个就行
mid360.yaml 如下
common: lid_topic: "/livox/lidar" imu_topic: "/livox/imu" time_sync_en: false # ONLY turn on when external time synchronization is really not possible time_offset_lidar_to_imu: 0.0 # Time offset between lidar and IMU calibrated by other algorithms, e.g. LI-Init (can be found in README). # This param will take effect no matter what time_sync_en is. So if the time offset is not known exactly, please set as 0.0 preprocess: lidar_type: 1 # 1 for Livox serials LiDAR, 2 for Velodyne LiDAR, 3 for ouster LiDAR, scan_line: 4 blind: 0.5 mapping: acc_cov: 0.1 gyr_cov: 0.1 b_acc_cov: 0.0001 b_gyr_cov: 0.0001 fov_degree: 360 det_range: 100.0 extrinsic_est_en: false # true: enable the online estimation of IMU-LiDAR extrinsic extrinsic_T: [ -0.011, -0.02329, 0.04412 ] extrinsic_R: [ 1, 0, 0, 0, 1, 0, 0, 0, 1] publish: path_en: false scan_publish_en: true # false: close all the point cloud output dense_publish_en: true # false: low down the points number in a global-frame point clouds scan. scan_bodyframe_pub_en: true # true: output the point cloud scans in IMU-body-frame pcd_save: pcd_save_en: true interval: -1 # how many LiDAR frames saved in each pcd file; # -1 : all frames will be saved in ONE pcd file, may lead to memory crash when having too much frames.
launch文件如下
运行该launch文件
roslaunch faster_lio mapping_mid360.launch
初始位置的情景和点云模型
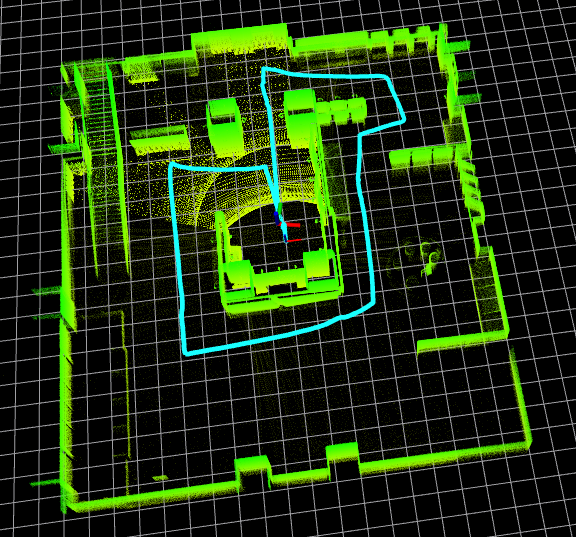
飞一圈后整个地图模型
审核编辑:汤梓红
-
【CIE全国RISC-V创新应用大赛】+基于MUSE Pi Pro的3d激光里程计实现2025-10-24 1676
-
AGV激光雷达SLAM定位导航技术2018-11-09 10092
-
SLAM技术的应用及发展现状2018-12-06 15558
-
激光SLAM与视觉SLAM有什么区别?2021-07-05 4736
-
激光SLAM技术在机器人运动控制系统中的应用是什么2021-07-30 3494
-
激光SLAM和视觉VSLAM的分析比较2021-11-10 5316
-
一种基于RBPF的、优化的激光SLAM算法2021-04-01 1072
-
激光雷达SLAM算法有哪些?2021-04-18 14862
-
基于三维激光数据的层级式SLAM方法2021-04-20 3203
-
智行者提出全新基于ivox激光雷达算法2022-02-25 4231
-
3D激光雷达SLAM技术的应用趋势2022-03-21 6513
-
有哪些激光雷达SLAM算法?2023-03-27 3667
-
3D激光SLAM,为什么要选LeGo-LOAM?2023-07-03 2045
-
NeRF何去何从?GS SLAM到底哪家强?来看看最新的开源方案!2023-12-26 2357
-
激光雷达在SLAM算法中的应用综述2024-11-12 3958
全部0条评论

快来发表一下你的评论吧 !
