

浪潮信息EIS400自动驾驶域控制器结构体系解读
汽车电子
描述
浪潮信息进军自动驾驶大约在2021年底,首先是算法部分,2022年10月浪潮信息提出了纯视觉的DABNet4D,2023年3月提出IEI-BEVFusion++,在关键性指标nuScenesDetection Score(NDS)得到77.6%的高分,创造了3D目标检测全赛道迄今最高成绩,与零跑汽车的EA-LSS并列全球第一。
汽车的高性能运算可以算是边缘计算,浪潮信息是国内边缘计算服务器排名第一的厂家,自然也延伸到汽车自动驾驶领域。
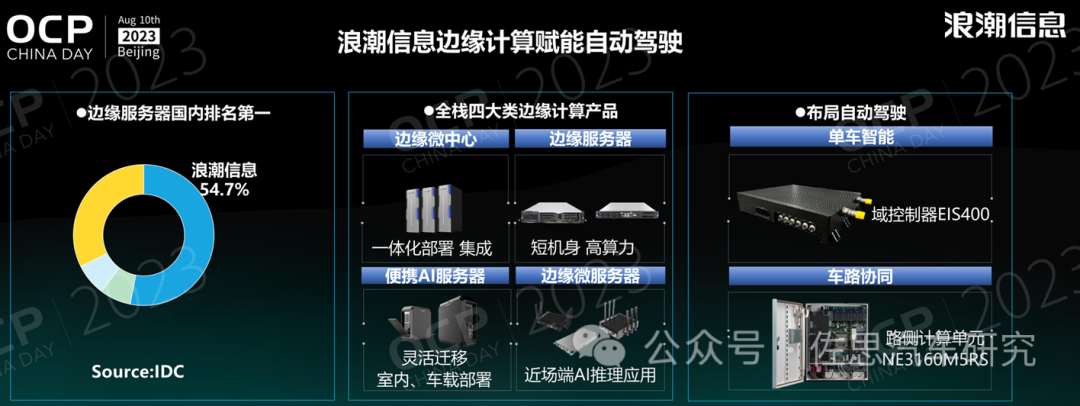
浪潮信息在2023年8月推出了EIS400自动驾驶域控制器和AutoDRRT计算框架,和汽车领域的厂家有比较大的差别。
EIS400自动驾驶域控制器

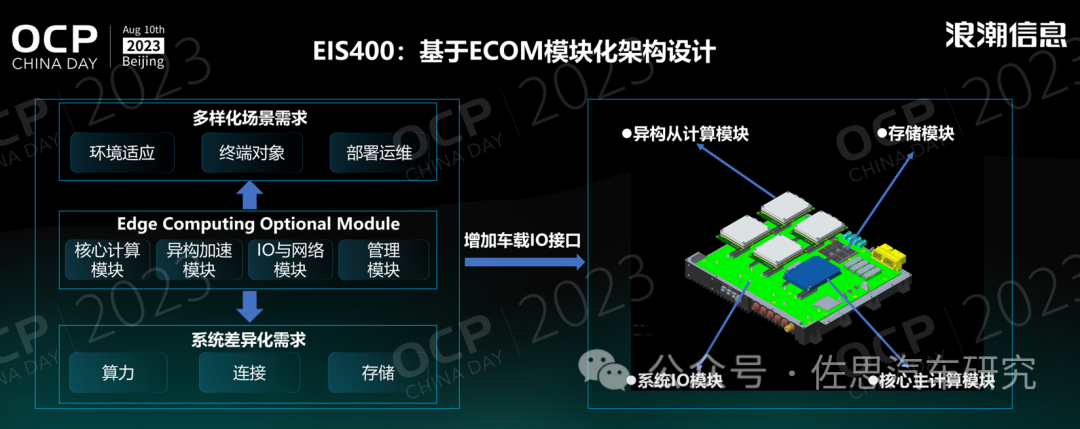
EIS400:基于ECOM模块化设计
EIS400框架图
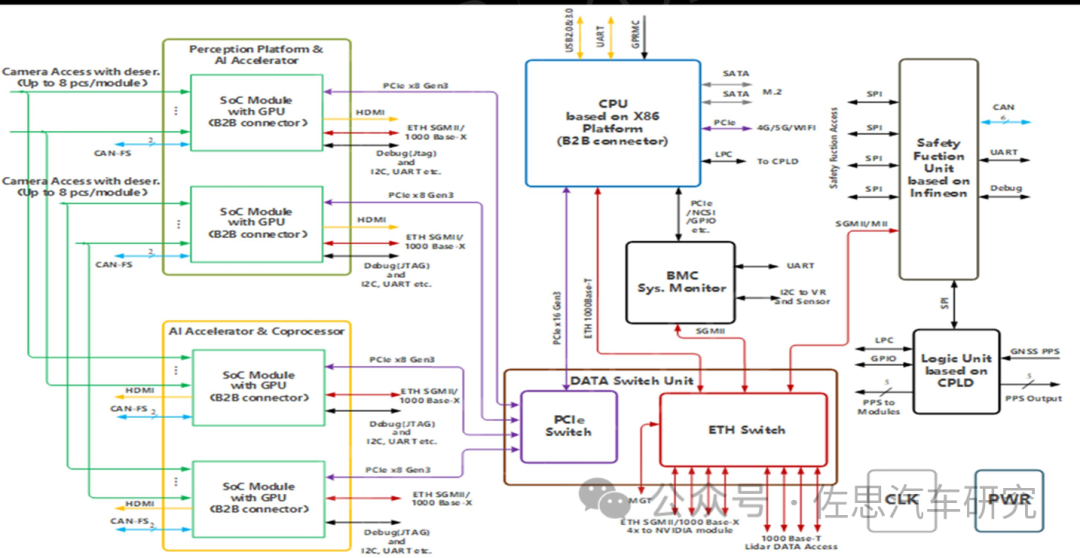
图片来源:浪潮信息
EIS400使用4个英伟达顶配Orin做AI加速与协处理器,这4个AI加速和协处理器任务完全不同,每一个任务领域只有一个Orin在负责,换句话说,这不是4个Orin并联,而是近似串联,4个相对独立的协处理器,这与传统汽车领域的域控制器相比差别较大。
作为服务器领域的专业厂家,浪潮自然使用了PCIe交换机连接4个Orin,而传统汽车领域为了节约成本,一般用以太网交换机。目前主流的以太网交换机带宽非常低,只有0.125GB/s,而英伟达多显卡之间连接用的NVLink带宽是900GB/s,差距悬殊,想要并联4个Orin让算力增加4倍完全不可能,顶多增加10%。浪潮使用了比较成熟的性价比高的三代PCIe交换机,连接Orin的是8通道,带宽是8GB/s;连接CPU的是16通道,带宽是16GB/s。目前PCIe已经进化到第六代,单通道带宽就可达64GB/s,是三代的8倍,当然价格也差不多是三代的4倍。浪潮也用了以太网交换机,这个以太网交换机也非常强大,具备8个千兆以太网接口和三个SGMII接口,可以接4个激光雷达。通常百兆以太网也勉强可以,但浪潮为长远考虑,用了千兆接口。
BMC系统监控应该就是服务器领域常见的主板管理控制器(BaseboardManagement Controller),MC是一种单独的芯片或嵌入式处理器,具有自己的独立网络接口,可直接连接到网络。通过BMC,系统管理员可以远程监控、维护、更新和控制服务器。BMC提供了系统管理固件、应用程序、外设和传感器,支持包括KVM(键盘、视频、鼠标)、电源管理、虚拟媒体、SNMP以及日志记录和远程访问等功能。服务器领域对可靠性的要求丝毫不低于汽车。
安全MCU 还是离不开英飞凌的TC397,浪潮还特别加了一个CPLD来负责处理定位信息,即PPS(PrecisePositioning Service),这个不是美国GPS的PPS,也不是pulse per second。CPLD可以看作一个缩微版的FPGA。
浪潮是把服务器领域的技术引入到汽车自动驾驶上,服务器都是多显卡加CPU配置,4个英伟达Orin可以看作4张显卡。CPU还是基于x86系统。

图片来源:浪潮信息
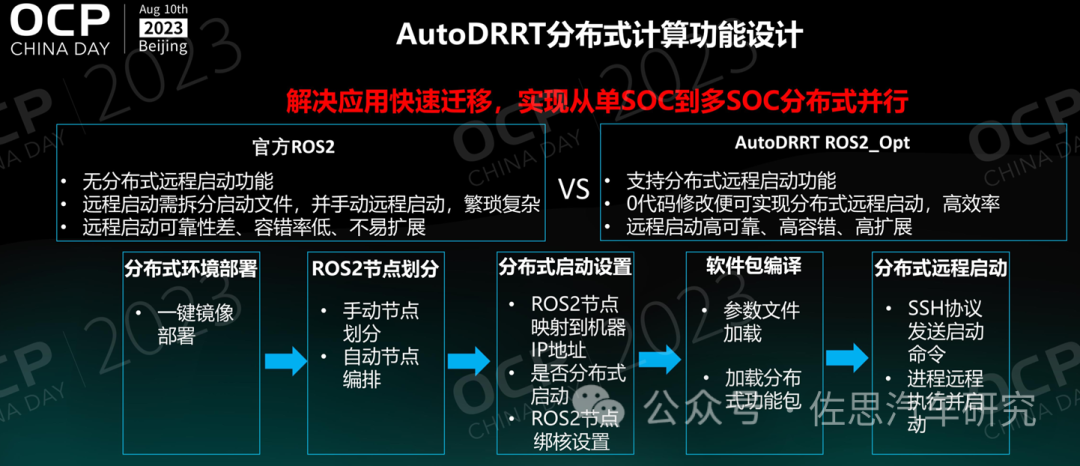
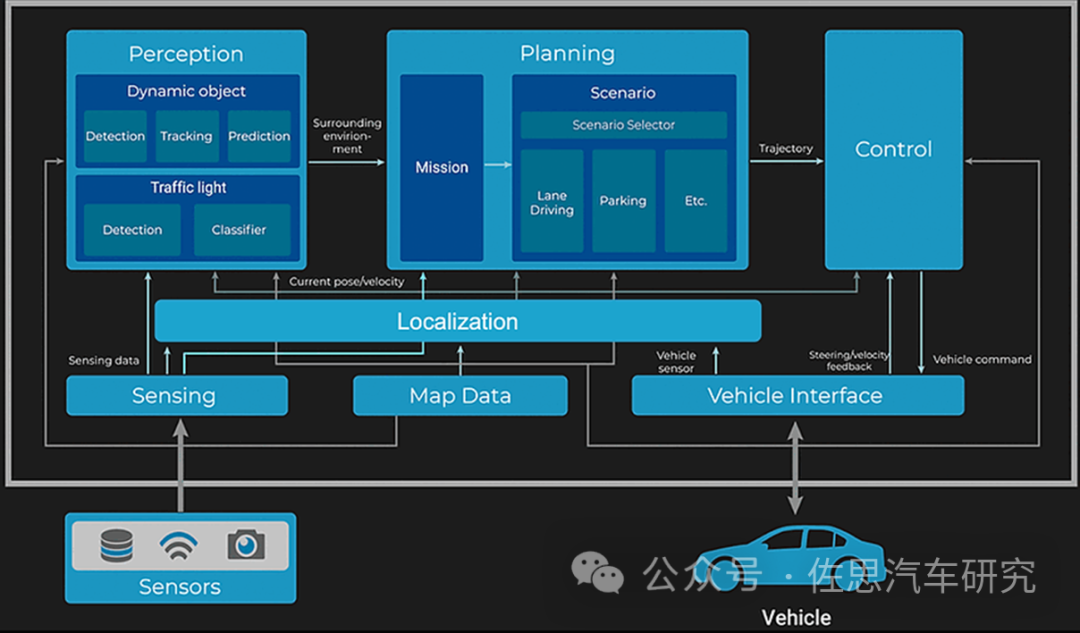
浪潮的AutoDRRT还是基于ROS2的改造。
图片来源:浪潮信息
ROS是无人出租车领域最常见的操作系统,除了百度,基本上都是ROS系统。ROS最初是斯坦福大学人工智能实验室与机器人技术公司Willow Garage共同开发的,2008年以后主要由Willow Garage公司推动,维护。
2012年以后,Willow Garage中有一个ROS团队,从公司中独立出来后,成为了非盈利组织the Open Source Robotics Foundation(OSRF),主要负责维护和更新ROS。ROS2是2016年底推出的,目前最新版本是2023年5月的Iron Irwini,大约每隔1年升级一次。采用ROS2最知名的自动驾驶开源架构就是AUTOWARE。ROS的核心功能可以看作是一个通信中间件,用于传感器和节点之间通信。
提到ROS就不得不提AUTOWARE,Autoware最早是由名古屋大学研究小组在加藤伸平教授(Prof. Shinpei Kato)的领导下于2015年8月正式发布。2015年12月下旬,加藤伸平教授创立了TierIV,以维护Autoware并将其应用于真正的自动驾驶汽车。如今主要分为两个大版本: 基于ROS 1的AutoWare.ai和基于ROS2的AutoWare.auto,Autoware.universe。它能够广泛的应用于多种车辆的自动驾驶商业部署。Autoware自动驾驶框架已经在20多个国家、30多种车型、500多个公司使用。Autoware 提供了一套丰富的自动驾驶模块,由传感、计算和驱动能力组成,包括定位、映射、目标检测和跟踪、交通灯识别、任务和运动规划、轨迹生成、车道检测和选择、车辆控制、传感器融合、相机、激光雷达、雷达、深度学习、基于规则的系统、连接导航、日志记录、虚拟现实等。
图片来源:浪潮信息
目前,The AutowareFoundation负责AUTOWARE的维护,有23个原始会员,其中知名会员包括AMD、ARM、富士康和华为。
图片来源:浪潮信息
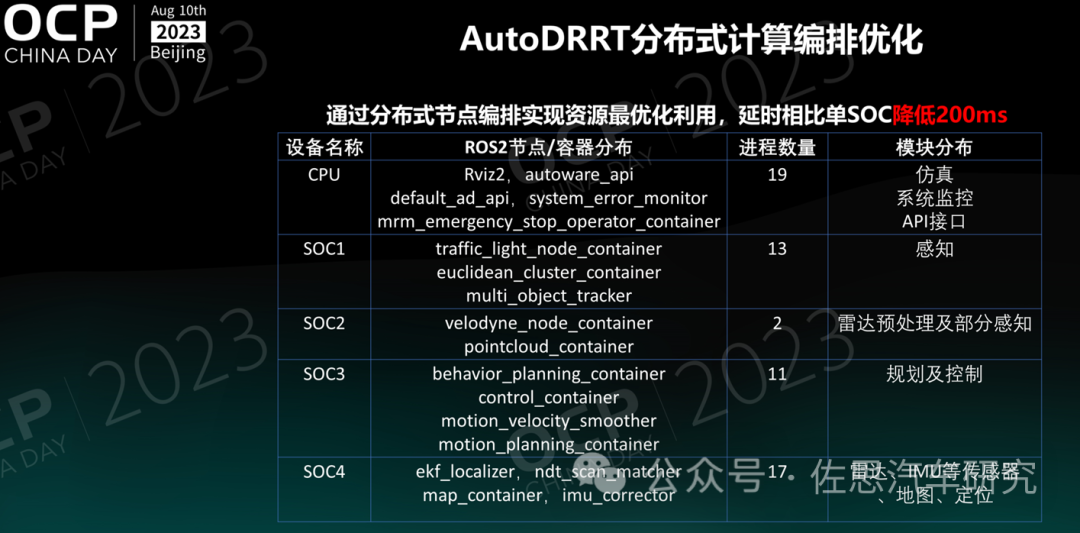
4个Orin与CPU的分工如上表。SOC2负责的是激光雷达,准确的说是Velodyne的激光雷达。CPU主要负责AUTOWARE基础,
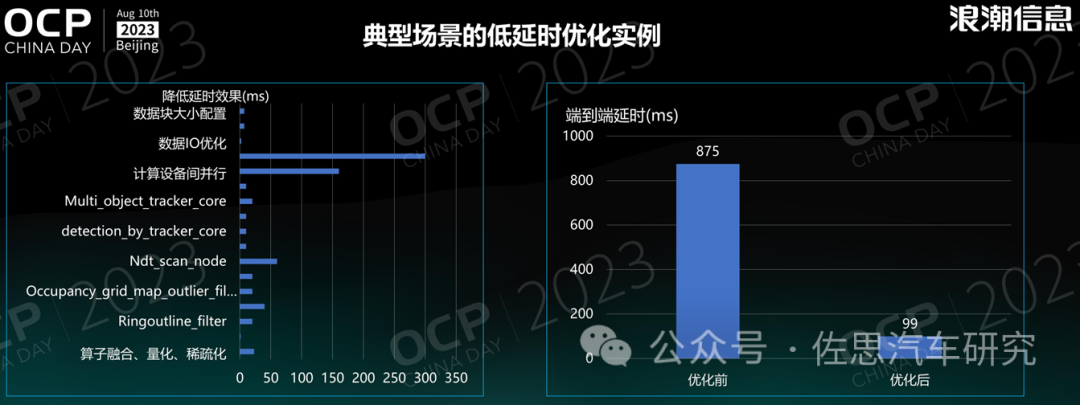
优化后延迟大大缩短。
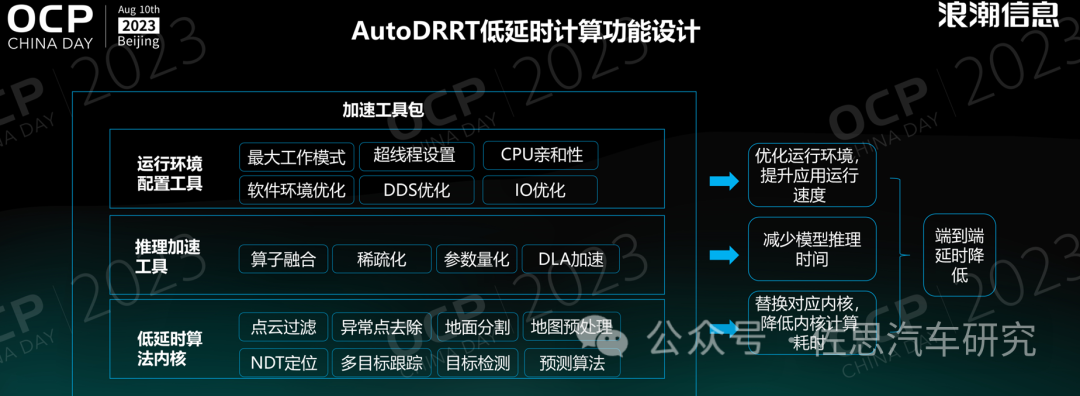
浪潮也没有完全照搬AUTOWARE,中间也加入了DDS。DDS是面向高可靠性场合的通信中间件,ROS的网络通信提供了2种方式,TCP和UDP。TCP是默认的通信方式。
TCP简单来说就是:发送方发出一个信息后,接收方需要发出一个信号,告诉发送方“我收到消息了”。如果发送方没有收到这个信号,那下一条信息就不能发出。
UDP简单来说就是:发送方发出一个信息,不管接收方是否有接收到消息,发送方都会一直发送消息。UDP比较适合自动驾驶,当然商业化的自动驾驶不是学术研究,需要更高级的通信。
通信中间件包括点到点,消息队列和发布/订阅三种工作模式,SOME/IP和DDS都采用了第三种工作模式,即发布/订阅。相比于面向信号的CAN,SOME/IP和DDS都是面向服务的通信协议。闭源的主要有Vector公司的SOME/IP, RTI公司的DDS等。开源的主要有OPEN DDS, FAST DDS, Cyclone DDS等。SOME/IP的全称为:Scalable service-Oriented MiddlewarE over IP,是一种面向服务的传输协议。严格地说,SOME/IP不是一款特定的产品,而是一种技术标准。其最早由宝马在2012-2013年开发,并在2014年集成进AUTOSAR 4.2.1中。当前,全球最大的商用SOME/IP产品供应商是Vector。开源版的SOME/IP则是由GENIVI协会来维护的。传统车厂基本都是用SOME/IP。
DDS的全称为Data Distribution Service(数据分发服务),是由OMG发布的分布式通信规范,采用发布/订阅模型,提供多种QoS服务质量策略。
DDS将分布式网络中传输的数据定义为“主题”,将数据的产生和接收对象分别定义为“发布者”和“订阅者”,从而构成数据的发布/订阅传输模型。各个节点在逻辑上无主从关系,点与点之间都是对等关系,通信方式可以是点对点、点对多、多对多等,在QoS的控制下建立连接,自动发现和配置网络参数。
DDS最早应用于美国海军,用于解决舰船复杂网络环境中大量软件升级的兼容性问题,后来扩展至航空、国防、通信、汽车等领域。
2018年,DDS首次被引进AUTOSAR AP,作为可选择的通信方式之一。ROS2和Cyber RT的底层都使用了开源的DDS,将DDS作为最重要的通信机制。与此相对应的是,英伟达的Xavier、Orin等面向自动驾驶的SoC芯片上也都预留了DDS接口。
全球范围内,DDS市场份额最大的供应商(80%左右)的是成立于1991年的美国RTI公司(全称为Real-TimeInnovations)。RTI作为OMG组织董事会的成员,主导了DDS标准的制定,从2004年开始负责主持DDS工作组的工作,目前已经成为该行业的领导者,对DDS标准有足够的权威。RTI开发的DDS品牌名为Connext,,因此又被称为Connext DDS。
在自动驾驶领域比较有影响力的开源DDS是由RTI原核心团队成员在欧洲创办的eProsima公司推出的FastDDS。在eProsima将FastDDS的源代码开放出来后,用户可以直接在github上免费下载。不过用户就需要通过向eProsima支付费用来取得支持。出于成本的考量,英伟达的Xavier和Orin自带的Driver.OS中便采用了FastDDS或OpenDDS这样的开源DDS。RTI方面认为,开源DDS是其最大的竞争对手。
AutoDRRT的容错机制
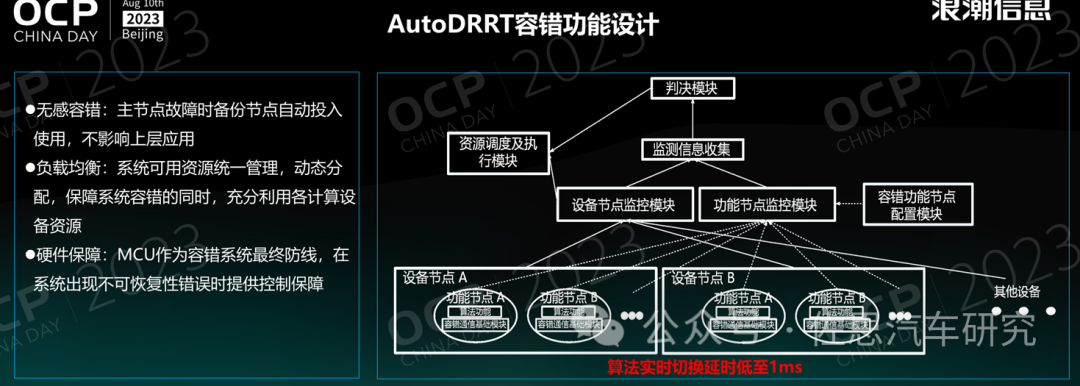
图片来源:浪潮信息
2023年11月,浪潮参加了日本的第五届日本自动驾驶竞赛,依靠EIS400和AutoDRRT获得了冠军。Japan Automotive AI Challenge是国际影响力的自动驾驶竞赛之一,由日本工程师学会2019年发起,旨在针对自动驾驶开发的各类难题,面向全球自动驾驶工程师征集解决方案。2023年的挑战赛围绕工厂无人运输场景,像“超级玛丽”游戏一样,赛道会设置障碍物、烟雾气体干扰、S 形、L 形狭窄路径多个题目,驾驶最远距离的队伍将获得胜利。此次竞赛吸引了东京大学、东京工业大学、名古屋大学、浪潮信息、日产、松下、住友、马自达等50多支顶尖自动驾驶团队参与。经过预赛亚马逊云线上仿真模拟比拼,有17支队伍晋级现场决赛,包括7家高校队伍和10家企业参赛队伍。
审核编辑:黄飞
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8402
-
自动驾驶的到来2017-06-08 7479
-
【PYNQ-Z2试用体验】基于PYNQ的神经网络自动驾驶小车 - 项目规划2019-03-02 5154
-
转发:聊聊边缘计算在自动驾驶中的应用场景2020-07-21 4985
-
自动驾驶线控底盘VCU功能介绍2021-09-07 3117
-
定位于自动驾驶的域控制器系统应运而生!2018-09-26 6185
-
阿丹能量:“自动驾驶汽车智能座舱域控制器”2020-11-13 5241
-
英恒科技正式发布CAELUS自动驾驶域控制器开源计划2021-05-28 3470
-
澳克诺领跑智驾域控制器,加速自动驾驶进入量产时代2022-09-14 1564
-
解读禾多科技自研域控制器智能驾驶域控的技术方案2022-12-28 1603
-
自动驾驶域控制器的来龙去脉2023-05-25 5037
-
浪潮信息长期赋能MAXIEYE实现云数据中心部署2023-10-19 1782
-
将成“标配”?自动驾驶域控制器深度解析2023-11-16 2652
-
小马智行发布新一代自动驾驶域控制器2026-04-29 778
-
知行科技L4级自动驾驶域控制器iDC700量产交付2026-05-21 1412
全部0条评论

快来发表一下你的评论吧 !
