

盘点人形机器人中的传感器
描述
文章来源:机器人网
原文作者:我的果果超可爱
机器人可以说是目前最炙手可热的话题,人形机器人和通用人工智能可以说是未来科技行业的制高点,工业和信息化部将人形机器人定位为“集成人工智能、高端制造、新材料等先进技术,有望成为继计算机、智能手机、新能源汽车后的颠覆性产品,将深刻变革人类生产生活方式,重塑全球产业发展格局”。
颠覆性的产品向来都是会带来新的技术革命,人形机器人伴随着本体技术的不断发展,以及通用性人工智能和传感器技术的迭代,目前已经从幕后的小范围实验室走到了商业化普及的前台。终端产品的应用和相关技术的发展向来都是相辅相成的,像是最新的AI视觉、类皮肤传感器和应变传感器都是新兴传感器的变种发展。
“眼睛”:事件视觉传感器
传统图像传感器根据自身设定帧率来捕捉光线并且记录感光数据,而想要做一个拥有视觉感知机能的机器人,就需要对你想看的对象做出识别。举个最简单的例子,我们在玩射击枪战类游戏时,尤其是在和对方激烈交火时,注意力往往都会被画面中动态的东西所吸引,大脑自动的把背景忽视了一样,视野里物体动作的感知然后再大脑进行判断并控制手部的动作,进而达成游戏的胜利任务,背后其实就隐含着一套逻辑算法流程。
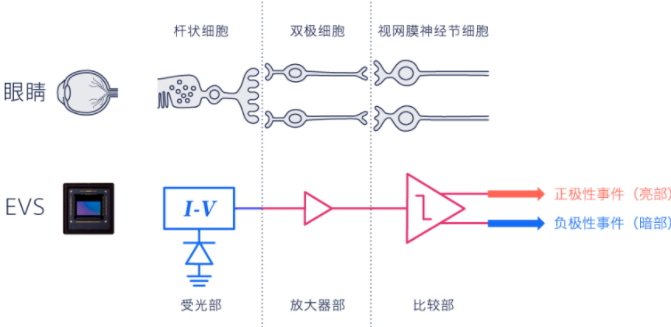
(图片来源:基于事件的视觉传感器(EVS)技术)
而这种基于事件的视觉传感器(以下简称EVS)模拟了人类视神经。完全不同于传统的基于帧的图像传感器,EVS只会将有亮度变化的部分捕捉为轨迹,因此没有帧的概念,也就是不会将感知到的静态对象识别为图像,其特点是即使高速移动的物体也能实时监测。
“手掌”:触觉传感器
触觉是人类社会最不起眼但也是最常用的感觉,像是我们每天都离不开的手机,触摸屏幕、指纹打卡等都是一种按压式的触觉。要想打造完美的人形机器人让其拥有触觉想必是必不可少的,研究人员提出了一种新型的柔软且可拉伸的电容式传感器。
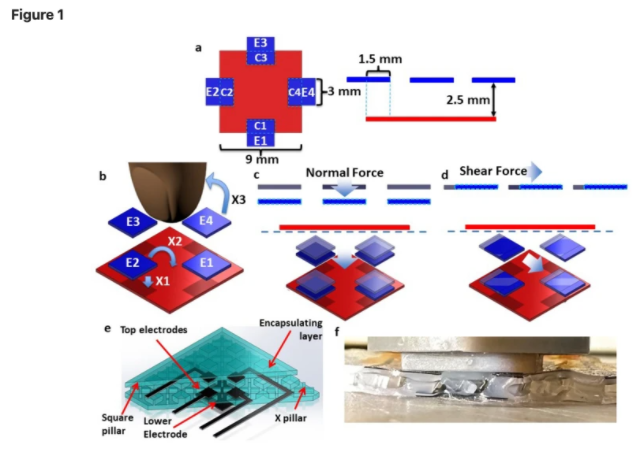
(图源:《Touch, press and stroke: a soft capacitive sensor skin》)
这种传感器通过电容量和电极之间的差异来获取法向力和剪切力,其结构是在一个柔软平坦平面的上方构造四个垂直电极,与下面的电极重叠,当受到外力时传感器能够感知并且区分传感器的压力和剪切力。如下图也揭示了不同按压力度和不同角度时传感器的感情情况,当一个不平坦的表面接触并按压传感器时,也就意味着四个电极受到的各个方向的力也不相同,就好像人手在触摸到粗糙的乒乓球拍时会感受到凹凸的颗粒感。这种新型的传感器成本低廉,能够大面积的制造扩展成传感器阵列,形成类似的皮肤传感器。
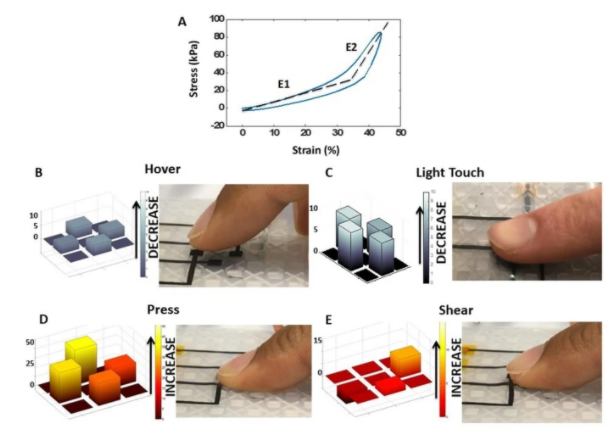
(图源:《Touch, press and stroke: a soft capacitive sensor skin》)
“皮肤”:折纸传感器
说起皮肤那向来都是光滑有触感的,那么人形机器人也不例外,研究人员以纸为基底,通过浸渍聚(3,4-乙撑二氧噻吩)-聚苯乙烯磺酸盐(PEDOT/PSS)溶液实现了大面积低成本的柔性可折叠传感器,该传感器拥有普通纸张的多微孔结构,可以在压力的刺激下通过层间接触面积的变化调节器件导电电流,从而实现外界应力刺激的捕捉与反馈。
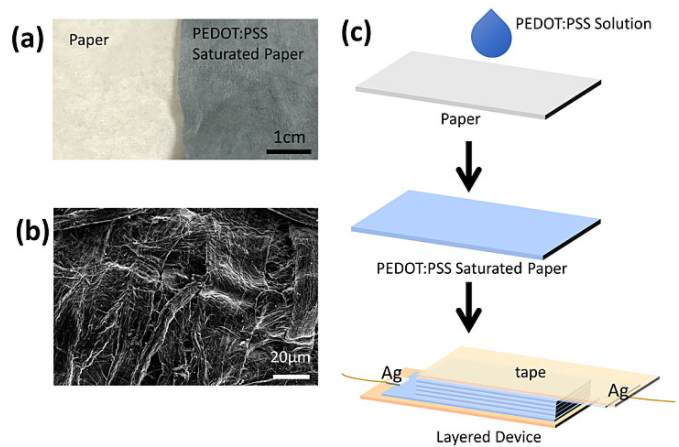
(图源:ACS Appl. Mater. Interfaces)
值得注意的是,该类型传感器有着极强的柔韧性,可以通过多次折叠变身成为高性能传感器件,经过三次折叠后,开关导通、关闭所需的电流呈现出不同的幅值。这种优异的力-电性能刚好类似人类的皮肤,我们都知道不同位置的皮肤对于刺激的感触不一样,这是由于神经分布的不同,那要是我们想打造一个人形机器人,自然全身上下的皮肤通过不同的层叠实现了类似于神经分布的方式,那么其内部的线路控制几乎减少了一半之多。
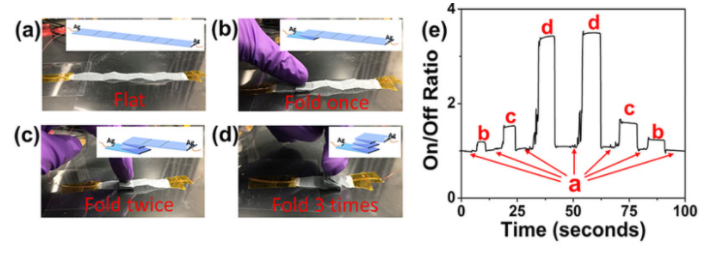
(图源:ACS Appl. Mater. Interfaces)
同时,用一个金属器件压在大面积的折纸传感器上方,就像一个人把重物放在胸前或者肚皮上,可以感受到的物品的形状和压力。
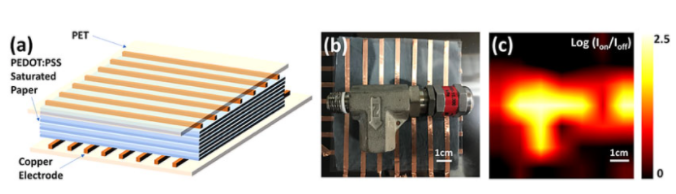
(图源:ACS Appl. Mater. Interfaces)
随着技术的不断革新演变,越来越多的传感器正在从实验室向着商业化走来,人形机器人以前可以说是存在于科幻小说和电影里的,但是现在在成本低性能好的传感器加持下,实现的脚步越来越快。
审核编辑:汤梓红
-
传感器:人形机器人感知核心(附报告全文)2024-08-27 2815
-
伺服电动缸在人形机器人中的应用2025-02-06 2163
-
为什么人形机器人更讨人喜欢?2016-05-12 5279
-
超声波传感器在机器人中的应用2018-08-09 8110
-
机器人传感器的类别和应用原理2018-11-08 2928
-
基于ARM9的DF-1机器人传感器系统设计2019-06-21 2441
-
采用ARM9实现嵌入式仿人机器人传感器系统设计2019-07-29 2237
-
现代机器人中有什么传感器?2019-07-31 2932
-
工业机器人中有哪些控制问题2021-10-11 1777
-
磁性位置传感器在自动化机器人中的作用2018-12-05 5418
-
机器人传感器行业现状与展望2023-10-17 1723
-
全面分析:人形机器人快速发展,哪些国产传感器将受益?(深度报告)2024-02-21 2471
-
FUTEK传感器在人形机器人中的应用2024-11-12 1608
-
探讨 GaN FET 在人形机器人中的应用优势2025-02-14 1858
-
ADI人形机器人的“感觉神经 + 电力神经元”核心芯片方案盘点2025-06-17 3118
全部0条评论

快来发表一下你的评论吧 !
