

驾驶辅助系统-自主泊车系统的主要技术方案
汽车电子
描述
壹 定义
随着自动驾驶技术的发展,自动泊车逐渐往自主泊车方向演进。
自主泊车又称为代客泊车或一键泊车,指驾驶员可以在指定地点处召唤停车位上的车辆,或让当前驾驶的车辆停入指定或随机的停车位。整个过程正常状态下无需人员操作和监管,对应于SAE L3级别。
自主泊车系统包含两个功能,即泊车与唤车:
泊车功能
是指用户通过车载中控大屏或手机APP选定在园区、住宅区等半封闭区域内的停车位或者选定停车场(有高精地图覆盖)然后车辆通过获取园区、住宅区等半封闭道路上的车道线、道路交通标志、周围其他车辆等交通环境、参与者信息,控制车辆的油门、转向、制动来实现安全自动驾驶,并通过自动寻找可用停车位或识别用户选定停车位,实现自动泊入、自动停车、挂P档、熄火、锁车门,同时防止潜在的碰撞危险的功能。
唤车功能
是指用户通过手机APP选定园区、住宅区等半封闭区域内的某一唤车点,然后车辆从停车位自动泊出、低速自动驾驶到达唤车点,从而实现唤车,同时防止潜在的碰撞危险的功能。
贰 原理方案
按主要技术路线,自主泊车系统可分为:
偏车端方案
偏场端方案
车端场端并重方案
偏车端和偏场端的自主泊车方案对比如图6所示:
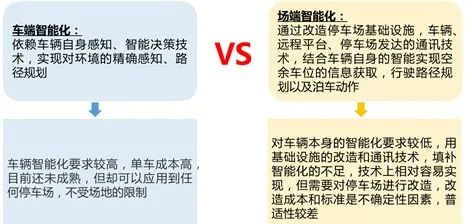
图6
偏车端自主泊车系统方案
典型的偏车端自主泊车系统的组成见以下图7和表2:
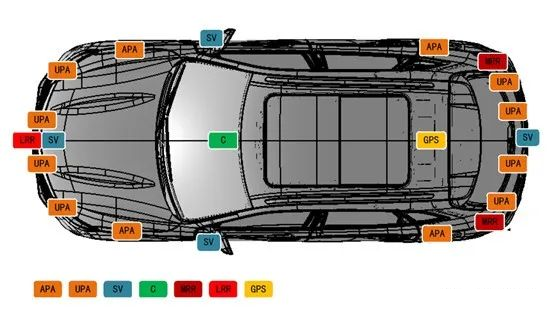
图7
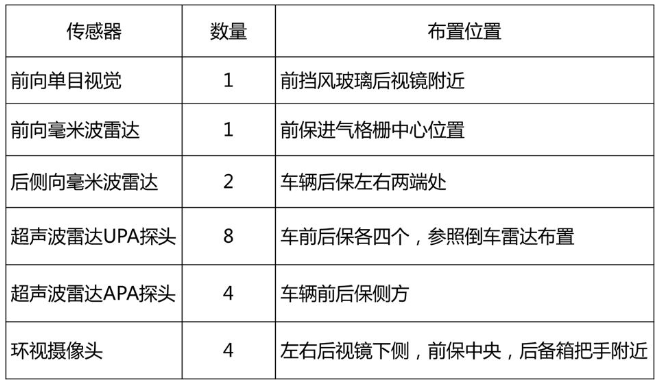
表2 主要传感器信息
偏车端方案的系统逻辑流程图见下图8:
由图可知,偏车端方案主要借助车载传感器对周围环境以及自身状态的感知来决策并执行车辆动作,并在必要时提醒用户进行车内或远程接管操控。
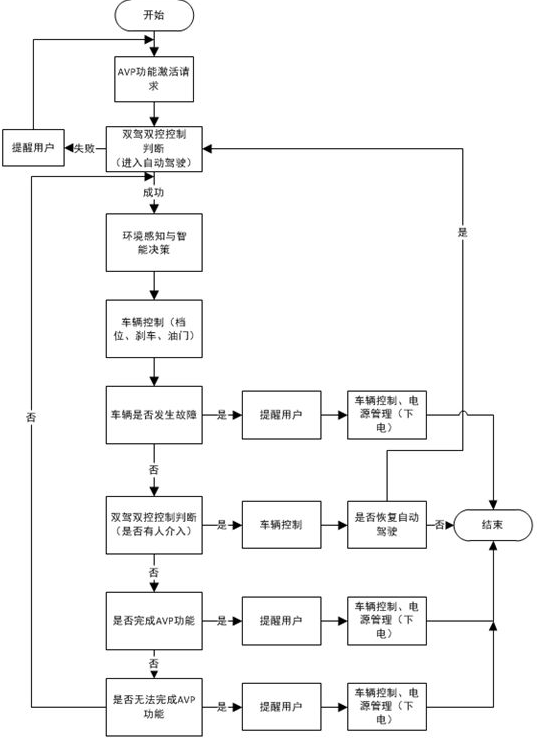
图8
偏场端自主泊车系统方案
图9为一种偏场端方案的系统示意图:
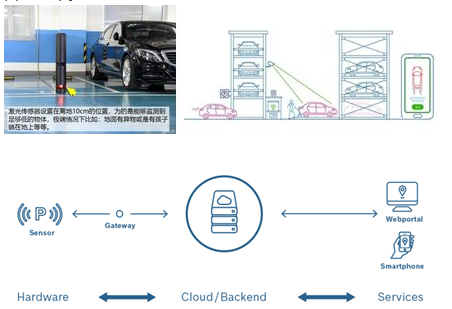
图9
在停车场内布置激光雷达或双目摄像头来实现对车辆状态及周边环境的监控,通过预埋式停车场传感器探测当前占用状态。
所有传感器数据均在数据中心进行汇总分析,根据储存的元信息(如停车位尺寸、费用、诸如残疾人停车位等的特殊情况等)完成匹配。
数据中心根据这所有的信息实时生成停车地图。
驾驶员通过智能手机APP接收所有的信息,从而始终能了解最近可用停车位的概况,以及所有相关详情,如距离和价格。
而车辆只需要具备与停车场设施的通信能力和可控的底盘执行系统,即可在场端的辅助下完成自主泊车。
审核编辑:黄飞
-
有关自动泊车系统设计,遇到难题2013-02-27 3111
-
【MiCOKit申请】360度全景泊车系统2015-07-24 2969
-
AVM全车监视系统 360度全景泊车系统2015-09-10 12616
-
从先进驾驶辅助系统到无人驾驶2016-10-27 5443
-
我想做汽车辅助驾驶ADAS系统,求方案2017-09-12 4586
-
Ameya360 环绕视野泊车辅助系统解决方案2018-04-16 2097
-
AMEYA360设计方案丨汽车后视安全辅助系统解决方案2018-07-26 2684
-
高级辅助驾驶ADAS技术2019-04-03 2631
-
AutoVision成像解决方案怎么助力辅助驾驶系统应用?2019-08-16 1949
-
自动泊车辅助系统介绍2020-12-15 3273
-
Xilinx FPGA在辅助驾驶系统中有哪些应用?2021-05-12 1526
-
求一种基于ZigBee的驾驶辅助系统解决方案2021-05-14 1519
-
全景泊车辅助系统视频演示2010-11-16 541
-
后视全景倒车辅助驾驶系统解决方案2013-03-08 3159
-
基于嵌入式的智能泊车辅助系统设计2017-09-25 846
全部0条评论

快来发表一下你的评论吧 !
