

凌华科技SuperCAT运动控制器在LED芯片分选机上的应用
描述
PART.01 应用背景:
Mini/Micro LED 被看作未来 LED 显示技术的主流和发展趋势,是继 LED 户内外显示屏、LED小间距之后LED显示技术升级的新产品,具有“薄膜化,微小化,阵列化”的优势,目前已经逐步导入产业应用。同时,由于芯片的尺寸变得越来越小(<200um),对测试和分选设备的速度与精度的要求也越来越高。
在芯片测试端,由于MiniLED生产工艺尚不成熟且良率不足,行业普遍采用全测全分模式,芯片出厂前需进行至少一次光电测试,以剔除不良芯片,满足下游对良率的要求。LED芯片分选机的主要作用有两个:一是接收探针台测试的报告数据,对芯片进行区分拣选;另一个是芯片与标准样品核对进行表面问题检测,淘汰掉不好的产品。设备一般由芯片上料台、机械手、芯片分BIN台、图形采集CCD系统等部分组成。
PART.02 SuperCAT产品概述
SuperCAT是凌华科技打造的基于软件控制的EtherCAT运动控制器,其核心的控制软件来自于凌华二十多年运动控制经验的积累,整合了凌华脉冲卡和EtherCAT总线卡的所有功能,系统通讯周期相比硬件的EtherCAT总线卡得到了大幅提升,同时可以满足更多轴数的应用需求。
SuperCAT产品特性
• 具备EtherCAT主站功能
• 运动控制周期高达125us
• 最多支持128轴运动控制
• 最低 API 延迟<10us
• APS SDK 支援
• MotionCreatorPro2 支援
• 支持开发语法 C#, .NET, C/C++, Python, Java…etc
• 支援多任务与实时程序运行
LED芯片分选机设备需求:
1) 通过DO输出实现位置比较触发功能。
2) 通过DI输入实现位置锁存功能。
SuperCAT解决方案:
该设备的核心运动控制单元采用SuperCAT主控软件,搭配凌华工业电脑,将原有的脉冲卡进行取代,减少了板卡的使用数量,有效降低了设备的购置成本(人力成本+材料成本)以及后期维护的费用。
1) 通过DO输出位置比较触发功能,例程如下,
// Table compare source: Encoder source
ret = APS_set_trigger_param( Board_ID, TGR_TCMP0_SRC, AxisID );
// Assign AxisID No encoder to be source
// Table compare direction : Positive
ret = APS_set_trigger_param( Board_ID, TGR_TCMP0_DIR, cmpDir );
// Compare direction is positive
// Table compare setting type
ret = APS_set_trigger_param( Board_ID, TGR_TCMP0_SETTING_TYPE, settingType );
// Table compare data setting type is clean mode
// DO bit mapping setting
ret = APS_set_trigger_param( Board_ID, TGR_TRG0_MAP, doBitMap );
// Binding to TCMP0. Assign to Bit 1
// DO signal mapping
doSignalMap = ( DOSlaveID << 8 ) | ( DOPortNo );
ret = APS_set_trigger_param( Board_ID, TGR_TRG0_SGN_MAP, doSignalMap );
// Binding to TCMP0. DO signal mapping to Slave2 port 1.
// Toggle setting
ret =APS_set_trigger_param( Board_ID, TGR_TRG0_TGL, toggleMode );
// Binding to TCMP0. Mode is toggle mode.
// Prepare table data.
for( i = 0; i < ArraySize; i++ )
DataArr[i] = ( i + 1 ) * 1000;
// Start Table CMP
ret = APS_set_trigger_table( Board_ID, TcmpCH, DataArr, ArraySize );
2)通过DI输入实现位置锁存功能,例程如下,
ret = APS_set_ltc_fifo_param( Board_ID, ltcCh, LTC_EN, 0 );
ret = APS_set_ltc_fifo_param( Board_ID, ltcCh, LTC_IPT, ltcDiBitMap );
// Assign DI Bit 2 to be latch channel 1 source
ret = APS_set_ltc_fifo_param( Board_ID, ltcCh, LTC_ENC, ltcEncSrc );
// Assign AxisID 5566 encoder to be latch channel 1 encoder source.
ret = APS_set_ltc_fifo_param( Board_ID, ltcCh, LTC_LOGIC, ltcLogic );
// Assing latch logic to be rising edge.
diSignalMap = ( DISlaveID << 8 ) | ( DIPortNo );
ret = APS_set_ltc_fifo_param( Board_ID, ltcCh, LTC_SGN_MAP, diSignalMap );
// Assign latch channel 1 DI signal mapping to SlaveID 15 port 1.
ret = APS_set_ltc_fifo_param( Board_ID, ltcCh, LTC_EN, 1 );
// Enable latch channel 1.
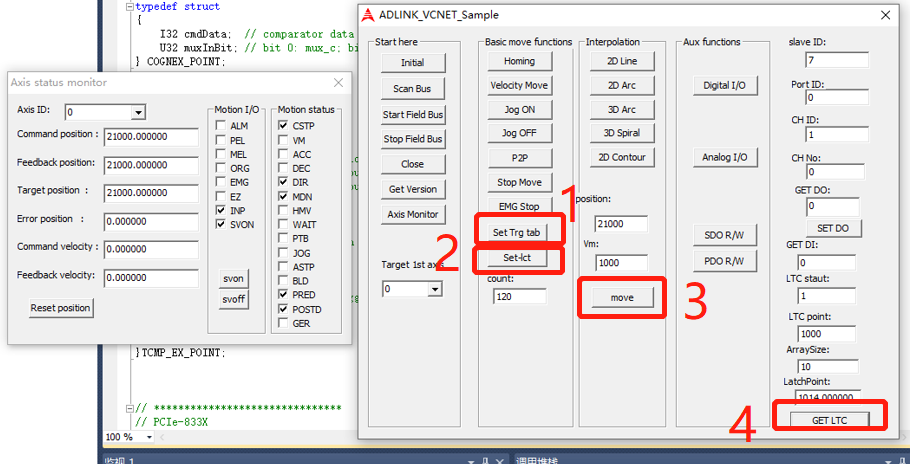
3)以上功能的实现和使用可以通过以下界面实现,
• 按钮1为设置位置比较触发参数;
• 按钮2为设置位置锁存参数;
• 按钮3可以使轴运动;
• 在轴运动过程中,点击按钮4,可以获得位置锁存位置。
PART.03 凌华科技EtherCAT一站式解决方案
凌华科技为智能制造用户提供一站式解决方案,实现生产设备之间的互联互通,全面共享和交互内部数据,从而优化生产流程,更好地应对市场需求的变化。
用户可通过PC端的编程环境,在单个硬件平台上实现应用程序的集中控制,从而降低成本,提高系统可靠性和安全性。
凌华科技是边缘计算解决方案的全球领导厂商,解决方案包括加固级模块与系统、实时数据采集解决方案,以及实现人工智能+物联网(AIoT)的应用等。凌华科技是Intel Internet of Things Solutions Alliance优选会员(Premier Member),NVIDIA全球伙伴,并积极参与多项国际技术标准,包括Open Compute Project (OCP) 、Object Management Group (OMG) 和ROS 2技术指导委员会(Technical Steering Committee; TSC)。
审核编辑:汤梓红
-
基于BL370边缘控制器的芯片分选机一体化控制解决方案2026-02-10 793
-
力矩电机用在IC分选机上应用工况2025-06-13 879
-
流量传感器在半导体芯片测试的分选机中应用2025-04-23 1414
-
PCIe实时运动控制卡的双盘视觉筛选机上位机开发应用2024-10-10 1817
-
大族半导体第1000台LED芯片分选机正式交付2024-01-22 1906
-
凌华科技基于软件控制的EtherCAT运动控制器2024-01-09 2126
-
凌华科技PCIe-833x运动控制卡在IC分选机上有哪些应用呢?2023-11-15 1758
-
凌华科技SuperCAT运动控制器在锡膏印刷机上有何应用?2023-11-06 1458
-
锂电池分选机如何分选电压内阻2022-04-20 2136
-
圆柱锂电池分选机使用注意事项2022-02-15 3060
-
电池分选机是什么,它有什么作用2022-01-10 2845
-
LED芯片测试的分选,LED的测试分选2018-08-24 5583
-
LED分选技术2017-08-04 3861
-
微型轴,精密轴自动测量分选机2017-06-29 3137
全部0条评论

快来发表一下你的评论吧 !
