

一次测量以表征对称叠加光学涡旋复振幅单分量
描述
导读
复振幅测量是光场表征的必要前提,在这项工作中,课题组提出了一种仅用CCD记录的一幅图像来表征对称叠加光学涡旋(SSOV)复振幅的一次测量方法。
一次测量方法基于UPOLabs HDSLM80R液晶空间光调制器搭建实验装置,实验结果如图所示,在实验中,该课题组选择了四个典型的SSOV(一阶、低阶、高阶和径向节点)来表征复振幅。
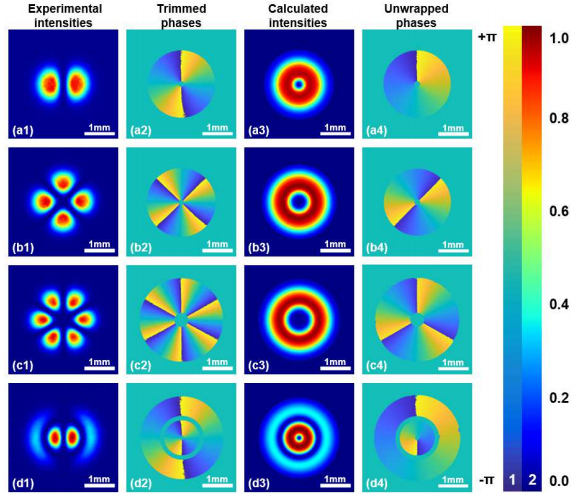
一次性测量的实验结果。(A1-D1)SSOV的干扰强度
主要内容
OV在光学微操作、等离子体激元、旋转探测、光学通信、引力波探测等领域有广泛的应用。这里经常使用对称叠加OV(SSOV)来代替单个组件。在实际应用之前需要表征SSOV中单个分量的复振幅,并测量其模式纯度。它是OV的重要质量参考,决定了OV在各种应用中的性能。

测量叠加OV中单组分模式纯度的实验装置
许多已证明的方法表征和测量SSOV的模式纯度,但最通用的方法是将场分解为模式的相干和,每个模式都有特定的振幅加权和相位:即所谓的模式分解。然而,它需要使用SLM逐个扫描多个全息图来完成测量,测量效率较低。本论文课题组提出的一种仅用CCD记录的一幅图像来表征对称叠加光学涡旋(SSOV)复振幅的一次测量方法,解决了测量效率低等问题,该方法是首次报道的。该方法耗时短,可以在0.24秒内表征SSOV的复振幅,并实现模式纯度的测量。由于使用要测量的SSOV的一部分作为参考光,尽管使用了相移技术,但不再需要额外的参考光束进行干涉,这在以前没有报道过。
一次测量方法包括两种策略。一种是用于振幅测量的环形提取策略,另一种是针对相位测量的旋转测量策略。在概念验证实验中,对复振幅进行了表征,并很好地测量了模式纯度,这种方法具有极好的灵活性,快速性和鲁棒性,可应用于各种场合和恶劣条件。
论文简要介绍了对全息图进行编码以生成SSOV的过程,我们对全息图进行编码,全息图可以用于在纯相位SLM上实现入射光的复数幅度调制。全息图的编码过程如图所示:
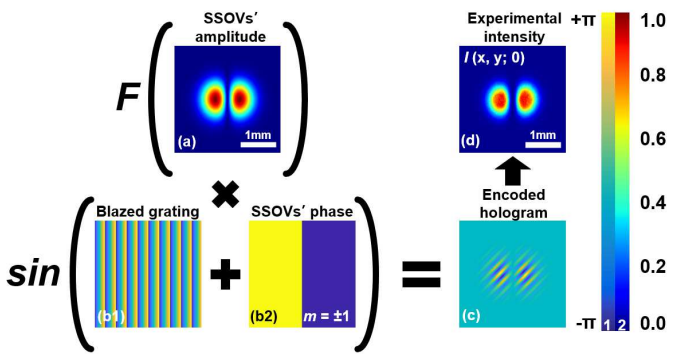
全息图编码示意图
为了通过一次测量获得SSOV的复振幅,课题组提出了两种策略。一种是用于振幅测量的环形提取策略,另一种是针对相位测量的旋转测量策略。环提取策略的示意图如图(a1-a4)所示,旋转测量策略的示意图如图(b1-b4)所示。
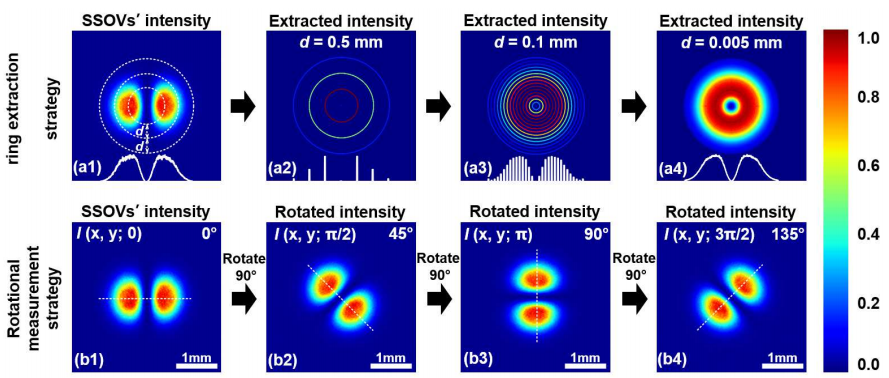
(a1-a4)环形提取策略和(b1-b4)旋转测量策略示意图
从理论上讲,在得到四个强度分布结果后,可以反推导出所需的相位。然而,由于三角函数的引入,在实际计算中,所需的相位被包装成 2π。我们不能通过简单地除以2来获得所需的结果,因此,需要相位展开技术。
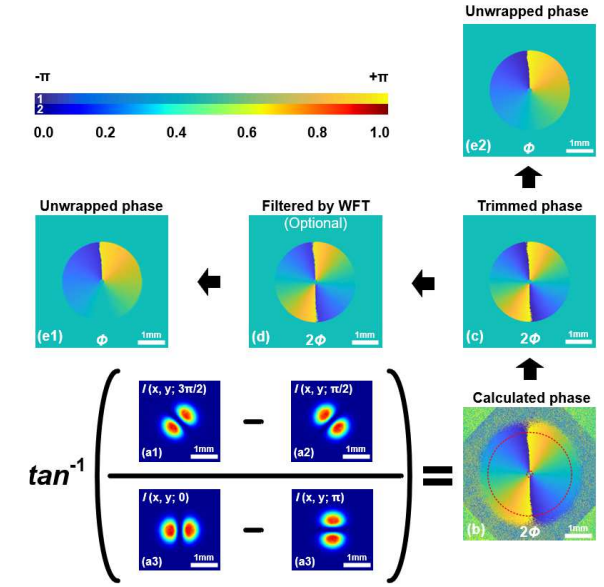
计算所需相位的示意图
为论证误差对测量的影响,课题组从角度误差、径向误差、实验误差三个方面进行了实验论证。
角度误差实验结果如图所示,结果表明它对模型纯度的测量结果几乎没有影响,这充分证明了该方法的稳健性。实验结果表明了旋转测量策略的准确性和鲁棒性。
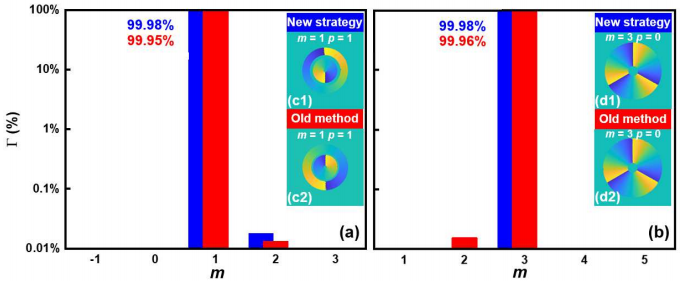
旋转测量策略(新策略)与相移法(旧方法)在OAM光谱测量中的比较。
径向误差实验结果如图所示,结果表明它对模型纯度的测量结果几乎没有影响,这充分证明了该方法的稳健性。
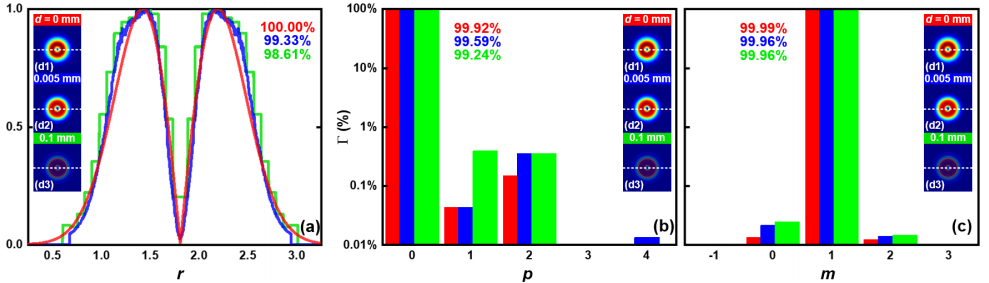
区间d在环形提取策略中引入的径向误差
实验误差结果如图所示,结果表明随着曝光时间的增加,测量的模式纯度略有下降。
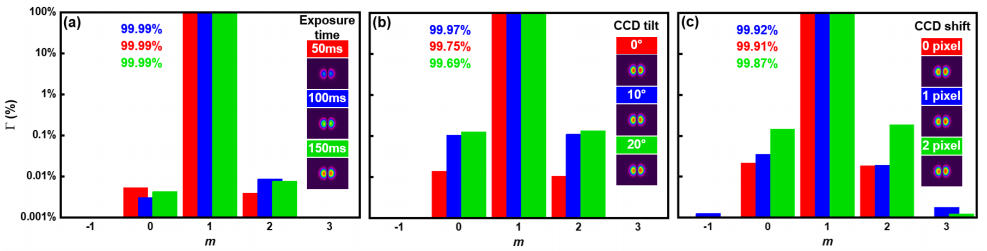
实验误差对结果的影响
三个误差导致测量的模式纯度0.1%至0.01%的偏差,但总体而言,实验结果表明,自干扰方法具有良好的鲁棒性。仔细的对准和优化的误差分析使我们能够生成和测量模式纯度高达99.99%的单个组件。
审核编辑:汤梓红
-
[VirtualLab] 二维叉形光栅产生涡旋光阵列2026-04-01 665
-
三坐标高效测量压缩机涡旋盘精度解决方案2025-11-13 1705
-
基波是一次谐波么 基波与一次谐波的区别2024-04-08 14951
-
基于完美矢量光学涡旋阵列的通信编解码2023-11-30 1662
-
针对一次消谐和二次消谐区别做一次新的总结2023-02-27 6023
-
如何使用傅里叶分析谐波分量的幅度及其与基波分量的相位关系?2023-02-21 10539
-
电气一次识图基础2022-11-12 2852
-
请问有什么方法可以一次性以编程方式获得所有512个频率的扫描测量值?2019-07-23 908
-
关于一次仪表、二次仪表、就地仪表、远传仪表的概念及区分2018-06-15 16813
-
复功率电源的支路功率分量理论2017-12-13 987
-
对称分量法2015-11-02 557
-
LED的一次与二次光学设计2012-07-06 1744
-
如何实现单次脉冲测量?2012-02-24 2846
-
用光学技术测量三维非对称温度场2010-07-26 917
全部0条评论

快来发表一下你的评论吧 !
