

3D AR进入汽车,将开启汽车科技新纪元
描述
在挡风玻璃上显示图形信息给司机并不是什么新鲜事。但这种“抬头”设备往往只能在2D和小范围内运行。这意味着人们需要经常在显示器和前方道路之间切换注意力。
最近,英国研究人员认为司机在保持注意力集中的情况下,应该有可能识别出他们面前隐藏的障碍物。研究人员将光探测和测距(激光雷达)与计算机生成的全息术相结合,展示了如何将这些物体的3D重现放置在司机视野中,并具有正确的外观尺寸——所有这些都是实时的。
追求无干扰的AR
这种显示器是所谓的增强现实(AR)的例子。AR技术不是让用户沉浸在一个完全人工的、由计算机生成的世界中,而是用额外的数据补充来自现实世界的感官输入。这种方法已经广泛应用于从教育到外科手术的各个领域。但在驾驶场景下,它有可能会让用户分散注意力。
为了解决这个问题,一些研究小组试图开发3D平视系统,其中一些依赖于全息技术。传统的全息图是通过物理方法用参考光束干扰物体光束来创建的,而AR中使用的全息图则是通过计算生成的,它从现实世界的物体上反射光或其他波,然后计算它们与参考光束结合时产生的干涉图案。关键在于能够快速准确地进行计算,从而捕捉到移动车辆周围不断变化的环境。
激光雷达全息图
在最新的研究中,剑桥大学的Jana Skirnewskaja和其同事,以及牛津大学和英国伦敦大学学院的同僚,展示了如何通过激光雷达(通过反射激光来测量物体的距离)来创建这种全息图。利用精心挑选的激光雷达点云数据,研究人员发现,即使在单次激光扫描中收集的数据相对较少,他们也可以重建物体的360度视图。
Skirnewskaja解释道,每个点都有自己的空间坐标和强度等级。给定足够的点,即使物体对移动的车辆只有部分可见,也可以在3D中重建物体。
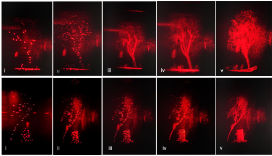
研究人员使用地面激光雷达扫描仪记录了一些物体的点云数据:包括一棵树、一辆卡车和站在自行车旁边的行人沿着Malet街(伦敦大学学院附近的一条路),然后分两步制作全息图。首先,计算了虚平面内各点发出的光波的叠加;然后,利用衍射的物理原理,从虚平面推导出全息平面。
重构场景
为了从全息图中重建观察到的场景,Skirnewskaja和他的同事们用氦氖激光照射液晶显示器,使晶体的双折射分子按照全息图干涉图案决定电场的特定排列排列开来。他们能够利用“虚拟菲涅耳透镜”将重建的物体放置在驾驶员视野内的正确距离上,从而节省车内空间。
研究人员使用大小从10点到40万点不等的点云来记录全息图,使用标准的计算机CPU和更强大的GPU来处理数据。他们发现,GPU的并行处理能力能够在相对较少的额外时间内产生更高质量的全息图像(处理100个点需要12秒,而处理1000个点只需要26秒)。
先快速浏览,然后提供更多信息
考虑到移动车辆对速度的需求,该团队建议,驾驶员可以首先使用只有25个点的激光雷达,在大约5秒后创建一个物体的轮廓,从而警告潜在的重要隐藏物体的存在。21秒后,一个1000点的全息图就可以创建出来,产生360°的物体视图,让司机进一步确定(如给定的卡车有多长等具体信息)。
Skirnewskaja表示,从进行测试以来,她和同事们已经改进了这项技术,展示了如何用红绿蓝光纤激光器将隐藏障碍物投射成全彩。她解释道,他们的计划是2024年在一辆真正的汽车上测试一个显示器,并与谷歌合作,为不同视力状况的人量身定制这个系统。但她补充说,在显示器真正用于道路使用之前,还需要进一步改进,包括将激光雷达扫描仪与摄像头结合起来,以识别路标上的文字,并重建物体的轮廓。
审核编辑:黄飞
-
裸眼3D***领域开启新纪元2012-07-31 2942
-
汽车的3D模型教程2014-08-06 5348
-
酷毙了的全景汽车3D视频2014-12-26 8932
-
3D打印能否革新汽车产业?2016-07-29 3325
-
物联网、AR、3D打印、机器人未来将改变我们的生活?2017-10-19 3014
-
2020中国北京国际3D打印与汽车智造展览会2019-12-20 1419
-
明亮经济的LED开启移动投影新纪元2009-11-13 703
-
谛听文化|裸眼3D与全息技术将开启新纪元2019-11-23 1238
-
通用汽车打造全新电动平台 将引未来电动化时代的新纪元2020-03-05 1253
-
3D传感——打造AI视觉的新纪元2020-12-26 1417
-
大众汽车将扩大用3D打印生产汽车2021-07-09 847
-
中软国际亮相第三届长安汽车科技生态大会,携手开启“数智新汽车”新纪元2023-09-08 1183
-
高精度3D Hall摇杆专用芯片,开启操控新纪元2024-10-30 1558
-
3D 视觉定位技术:汽车零部件制造的智能变革引擎2024-12-10 1672
-
深蓝汽车携手华为开创全民智驾新纪元2025-02-10 1342
全部0条评论

快来发表一下你的评论吧 !
