

芯片跨时钟域设计案例简析(一)
描述
(一)单bit信号同步器
最经典的2DFF 1-bit同步器如下,下图结构通常用于单bit控制信号的异步处理:
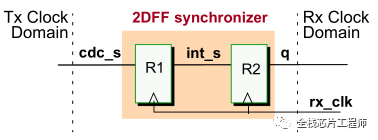
绝大数情况下,当第一个寄存器R1进入亚稳态后,在第二级寄存器R2采样R1的输出前,R1的输出已经能稳定在0或1。
注意:
cdc_s信号必须做到glitch free,也就是我们通常说的寄存输出;
int_s信号链路禁止组合逻辑,其本质也是杜绝glitch的出现。
偏执狂的IC designer肯定会问,第一级寄存器R1的行为到底是啥样子的?由于cdc_s信号是Tx clock Domain,而R1寄存器的采用时钟是Rx clock Domain,当Rx clock采样时,若cdc_s正好跳变(不满足setup/hold),那么就会出现如下两种情况,而前仿真是无法仿真出下图2种行为的(具体见芯片设计之CDC异步电路(一)一文)。

(二)DMUX同步器 两级寄存器(先进工艺要求三级)的同步器通常用于控制信号的异步处理,但是data bus的异步处理呢?我们可以采用DMUX结构。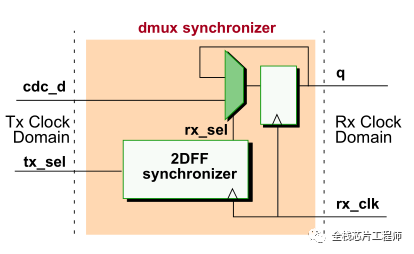
注意:
tx_sel、rx_sel有效时,cdc_d数据总线必须保持稳定;
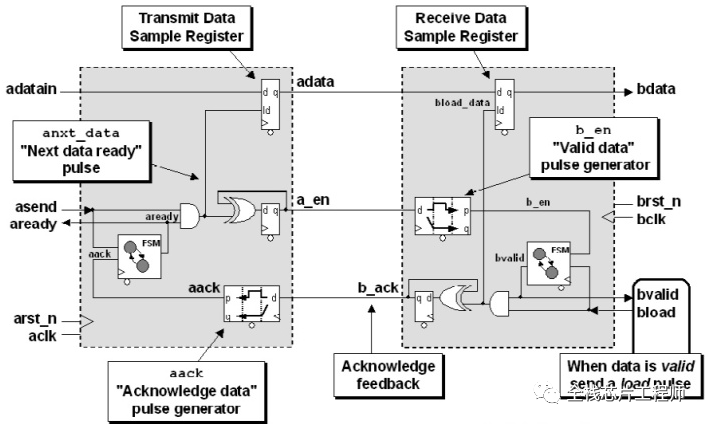
(三)握手处理
源时钟域先将数据发送到总线上,并给出一个valid信号,而目标时钟域同步valid信号后,若valid信号为高电平则采样总线数据,并返回一个ready信号给源时钟域。源时钟域再次同步该ready信号,若ready信号为高,则代表一次握手成功,数据传输完毕,开始进行下一次数据传输。
采用握手机制可以保证异步multi-bit数据传输不出现错误,但由于需要等待握手的完成再传输数据,因此传输效率较低。
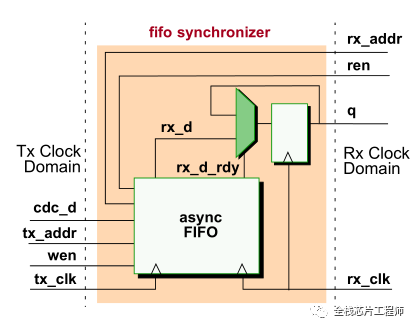
(四)异步FIFO
老生常谈的异步FIFO,其本质是采用格雷码,在地址连续的情况下,其对应格雷码每个周期只变化1bit,因此可以直接异步采样。
注意:
FIFO的overflow、underflow问题;
tx_addr是连续的,即地址hamming distance是1;
FIFO深度须2^n;
经典的FIFO结构如下:
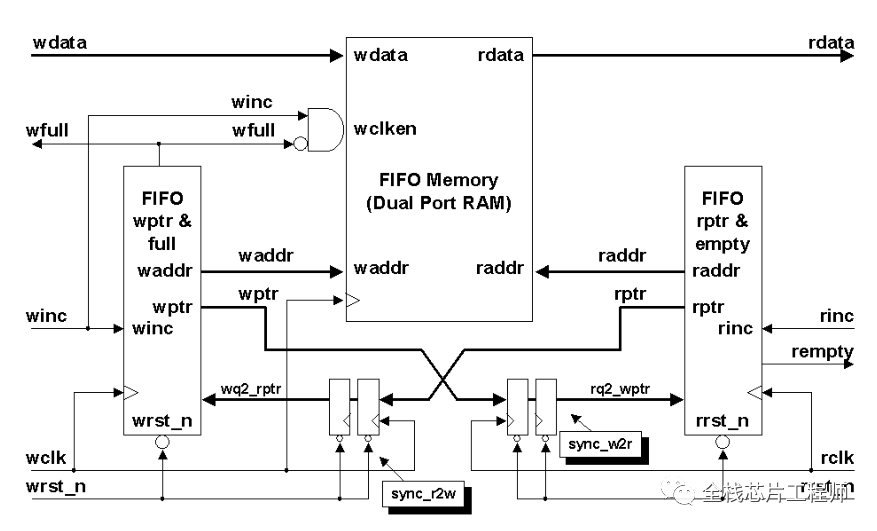
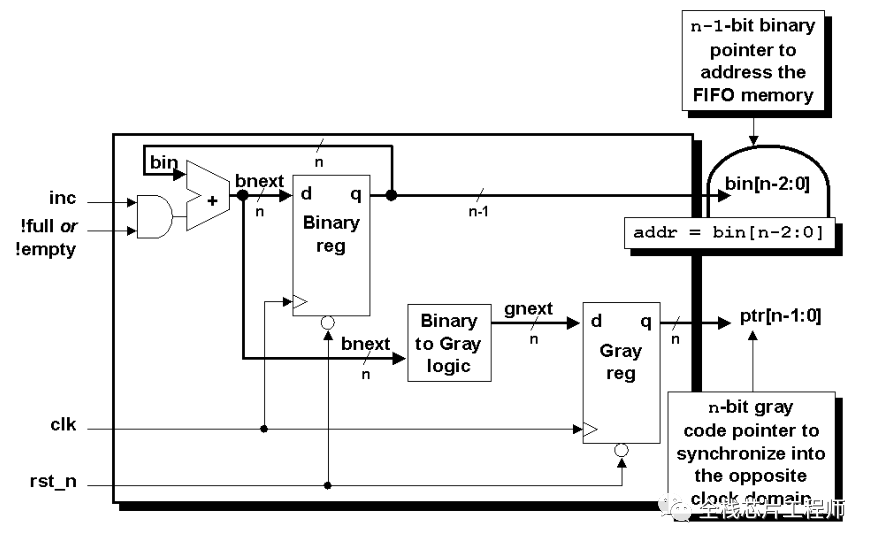
核心电路:是将FIFO读写地址指针的二进制码转成格雷码,方便同步器打两拍传递到对向时钟域去做空满判断。
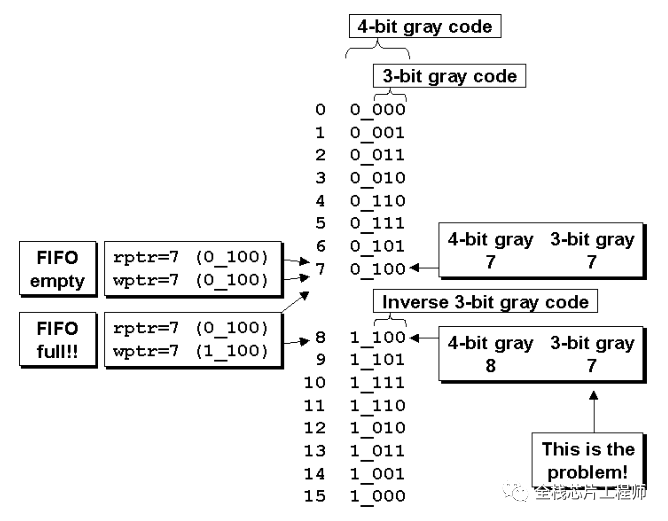
空满判断:为了区别空满,我们增加1bit的地址(MSB),我习惯直接用Gray码比较读写指针判定空满:
当Gray码读写指针完全相等时,FIFO空;
当Gray码读写指针最高2bit相反,其余bit相同时,FIFO满; 通常二进制码比较空满是:最高bit不同,其余bit相同,则FIFO满,而格雷码则不同哈。
审核编辑:刘清
-
如何处理跨时钟域这些基础问题2024-01-08 1574
-
fpga跨时钟域通信时,慢时钟如何读取快时钟发送过来的数据?2023-10-18 2261
-
FPGA跨时钟域处理方法(一)2023-05-25 3349
-
跨时钟域电路设计总结2023-05-18 1703
-
关于跨时钟域信号的处理方法2022-10-09 8739
-
FPGA跨时钟域处理简介2022-02-23 1232
-
两级DFF同步器跨时钟域处理简析2022-02-17 1400
-
如何处理好FPGA设计中跨时钟域间的数据2021-07-29 1760
-
关于跨时钟域的详细解答2021-04-27 5431
-
vivado约束案例:跨时钟域路径分析报告2020-11-27 7137
-
跨时钟域控制信号传输设计方案2020-10-16 1636
-
关于FPGA中跨时钟域的问题分析2019-08-19 4164
-
如何利用FPGA设计一个跨时钟域的同步策略?2018-09-01 6324
-
cdc路径方案帮您解决跨时钟域难题2017-11-30 8974
全部0条评论

快来发表一下你的评论吧 !
