

步进电机的原理及特点
电子说
描述
•步进电机
步进电机的工作原理: 用脉冲信号控制电机断续运动。
•步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(步进角)。您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转速,从而达到调速的目的。
•步进电机的优点
•1 电机的旋转角度和脉冲信号的数量成比例关系
•2 静止状态下力矩最大(绕线通电情况下)
•3 好的步进电机,步进角(是指输入一个电脉冲信号,步进电动机转子相应的角位移)的误差只有±3-5%, 并且这个误差不会在以后的步进中累积,利于高精度定位和做往复性动作
•4 启动/停止/反转的响应快
•5 电机内无电刷,可靠性高,电机的寿命基本上只取决于轴承的寿命
•6 电机只需用开环控制的脉冲信号,控制方式简单成本低
•7 电机轴承上的负载在超低速下也能同步转动
•8 转速和脉冲信号的频率成正比,电机的转速可以在一个宽范围内控制
• 步进电机的缺点
•1 控制不当会引起共振
•2 不易超高速运行
•步进电机的种类
•主要有三种反应式(VR),永磁式(PM) 和混合式(HB)
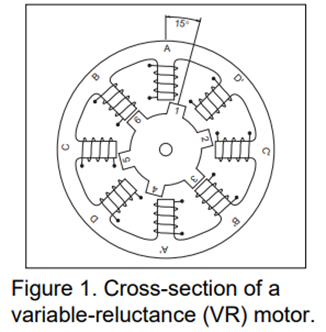
•1 反应式(变磁阻)步进电机 (VR=Variable Reluctance)
•如图1,反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰,构造如图一所示,中心的转子由带齿的电磁软铁构成,周边有绕线的是定子。给定子绕组 AA’ BB’ CC’ DD’)按顺序接通直流电后生成磁场,通过吸引转子齿上磁极带动转子转动
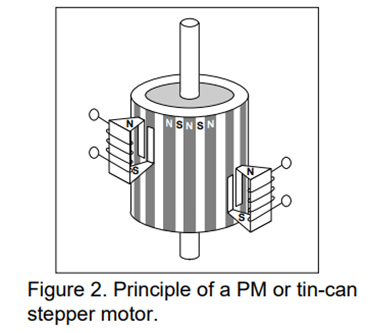
•2 永磁式步进电机 (PM=Permanent Magnet)
•如图2,永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度 或15度; PM步进电机成本低,定位精度低,步距角在7.5-15°之间(24-48 step/转),和VR步进电机不同,转子没有齿。取而代之的是在转子平行于轴的方向上交互磁化了的S和N磁极。因为转子的磁通密度大,PM电机比VR电机的扭矩大
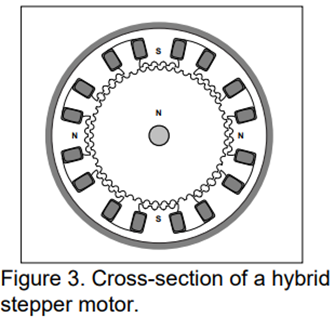
•3 混合式步进电机 (HB=Hybrid)
•如图3,混合式步进是指混合了永磁式和反应式的优点。和PM电机相比,价格高,不过步进精度,扭矩,速度都要好。HB电机的步进角在0.9-3.6°之间(100-400 step/转)HB电机结合了VR和PM的优点,根据转子上的齿型可以得到优化了的磁通路,磁力线可以被引入到指定的磁隙。
•通常使用的步进电机主要是PM型或者HB型,因为PM的价格是HB的几分之一,所以在不知道什么电机合适的时候可以先选PM看看。
•尺寸和输出
• 除了根据步进角分类,步进电机也根据外形尺寸来分类的。
•例如尺寸为11的步进电机本体的直径是1.1英寸,23的本体直径为2.3英寸(58mm),不过本体的长度即使直径相同也可能不同。一般情况下,同尺寸的步进电机的本体越长扭矩越大
•由IC驱动的步进电机的功率从不到1W的小型机,到10-20瓦的大型机。通常电机厂家不会在规格书上标记电机的最大功耗以及耐热界限。不过我们可以用P=V*I来估算。例如尺寸为23的电机的额定电压6V,1A/相,因此2相通电的情况下 其功率为12W。通常电机的额定功率是在电机外壳温度比环境温度高出65°时消耗的电力。所以如果给电机装上散热装置的话可以提升电机的功率。电机会在额定功率下工作,因此设计时要平衡尺寸,功率,成本三者之间的关系
•
•步进电机的用途
步进电机适用于需要控制旋转角度,速度,位置以及有同步要求的场合,因此广泛应用在打印机,各类OA设备
•旋转磁场
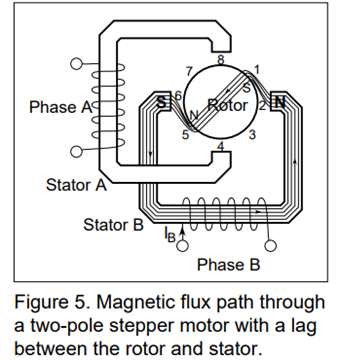
• 给定子上的绕组通电会产生磁场,其磁力线的方向遵循右手法则。图5的B组绕线IB电流产生如图所示的磁力线(线圈内逆时针),转子向磁力线受阻最小的方向顺时针旋转,这时候转子的S极和位置2处的定子N极同位,N极和位置6处的定子S极同位。通过控制定子上绕组通电时序,我们就可生成一个旋转磁场,引导转子旋转。
•扭矩的产生
步进电机的扭矩和以下因素相关
-脉冲速度
-绕线励磁电流
-驱动方式
当定子和转子的磁力线不在一个方向时,产生扭力。 定子是导磁率高的磁性材料,就像电路中电流在导体内流动,大部分磁力线都会集中在定子的两极。 电机所产生的扭矩大小和定子绕组所生成的磁力线的强弱成正比。磁力线的强弱可根据下面的公式计算。
H= (N x i) /I
H: 磁力线的强弱
N : 定子绕组的线圈数
i : 流经线圈的电流
I : 磁力线通路的长度
由这个公式可知,即使是相同尺寸的步进电机,通过改变绕线的参数,扭矩也将有很大的变化。
•相位,磁极和步进角
• 虽然也有3相,5相的步进电机,但更多的是两相,本文也只介绍2相的电机。
•双极性步进电机是指:有两个线圈,四条线。电流在两个线圈中可以正反向流动,所以叫做双极性。双极步进电机每相只有一个单绕组,没有抽头。 为了反转磁极,绕组中的电流需要反转,这意味着双极步进电机驱动通常更加复杂并且通常需要H桥排列。 由于没有公共端,每相有两个引线,典型的两相电机会有四根引线。 尽管双极电机通常驱动更加复杂,但它们确实具有它们的优点,因为更好使用的绕组,双极电机比同重量的单极电机更强大。
•单极性步进电机是指:有两个线圈,但是有五条或六条线,即在一个线圈的中间增加了一个抽头,五条线的可以看成是六条线把两个线圈的两根中间线并在一起。因为在一个线圈的中间有了抽头,电流就可以在一个线圈的一半走不同的流向,但这时只是用到电机线圈的一半而已。这种类型的步进电机由一个带有中心抽头的单绕组组成。 根据期望磁场的方向,绕组的每个部分接通,因为这样,磁极可以反转而不用切换电流的方向。 中心抽头比较常见,虽然在两相单极步进电机上通常有6个引线(每相3个),两个公共端可以在内部连接在一起,也就是说只有五根引线。
•磁极 被磁化的物体内磁力线集中的区域。 在电机的定子和转子上都有磁极。图5所示 定子上每相有两个磁极(或称为一对磁极),转子上也是有几组磁极对构成。
•为了增加电机每转一圈的步数,意即减小步进角,可以通过增加定子和转子的磁极对。
•对于PM型步进电机来说,转子和定子的磁极对数量是一样的,通常,PM电机有12对磁极。
•对于HB型的转子是带有齿的永磁体,其中一半的齿是N极,另一半是S极。HB型的定子的主磁极上带齿,这样可以将磁极的间距进一步减小(等价磁极数=360°/磁极间距)通常 步进角3.6°的HB电机有4个主磁极,1.8°或者0.9°有8个主磁极。转子和定子的磁极数和步进角的关系如下
•步进角=360/(NPH x PH)=360/N
•NPH 每相对应的磁极数
•PH 相数
•N 所有相的总磁极对
•如果转子和定子的齿间距不等,步进角的计算将会比较复杂
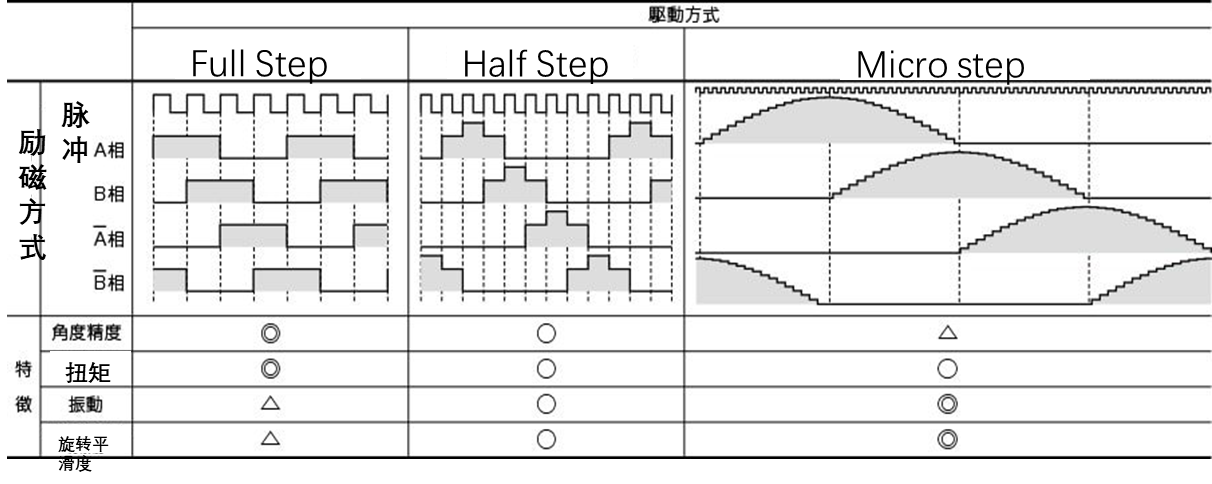
•步进电机的驱动
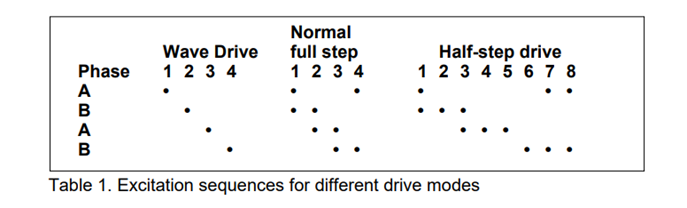
•通常的驱动方式有
•Wave 直接波形驱动 (1相励磁)
•Full step全步驱动 (两相励磁)
•Half step半步驱动 (1-2相励磁)
•Micro step 微步驱动 (电机的电流连续变化)
•波形驱动/1相励磁 是指在一定时间里只对1相励磁。定子的励磁时序 A→B→A’ →B’,转子沿8 →2 →4 →6转动。波形驱动的缺点是双极性电机只用了总线圈数的50%,单极性电机只用了25%,这也意味着其输出功率有限
•全步驱动(两相励磁)是指在任意时间同时给A/B两相通电励磁,定子按照A•B→A’ •B→ A’•B’→ A • B’时序励磁,转子沿1→3 →5 →7转动。和1相励磁相比,两相励磁下转子转过相同的角度,但是其机械位置有1/2被offset。和双极性电机相比,单极性只用了一半的线圈数因此输出扭矩也少一半
•半步驱动/1-2相励磁,这是1相和2相励磁的组合方式, 定子按照A•B→B→ A’•B→ A’→ A’•B’→ B’→ A•B’→ A, 转子沿1-2-3-4-5-6-7-8转动
•三种驱动方式的比较
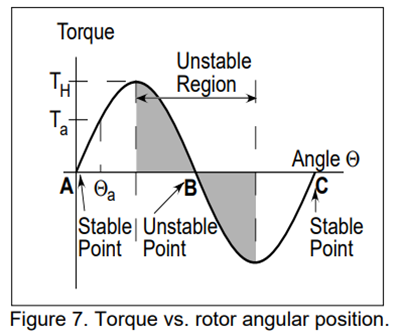
扭矩和角度的关系
•理想的步进电机的扭矩和转子转角应该像如图7所示的正弦波形。位置A和C是转子在没有外力和负载时停止的位置。当给转轴施加外力Ta时,转轴转过角度θa,θa对应电机是加速还是减速的状态,分别称之为前进角或者滞后角。给转轴施加负载让其停止时,转子根据θa确定停止位置。电机为了取得和负载的平衡,对于施加的外力产生扭矩Ta。随着负载的增大,最终电机将到达保持扭矩TH (holding torque),变为角θa也随着增大。超过TH的话,电机进入非稳态,在这个领域,电机上会有反向扭矩产生。转子通过这个不安定点后,进入下一个安定点。
变位角由下式可得
•X=Z/2π*sinTa/TH
•其中
•X: 角度变化量
•Z : 转子齿数
•Ta : 负载扭矩
•TH : 电机额定保持扭矩
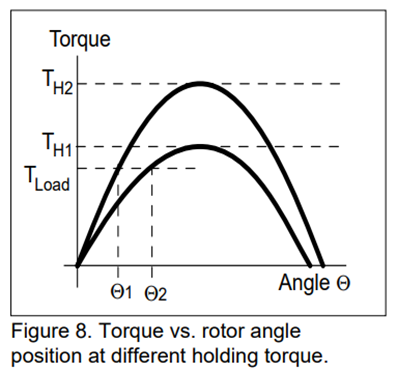
•因此 在有负载的情况下电机停止时,如果步进角有误差,可以通过改善电机的刚性来提高。也就是提高电机的保持扭矩TH,如图8所示,通过提高TH,滞后角从θ2变小到θ1。
步进角的精度
步进电机得以普及的一个主要原因是其定位精度和可重复性。一般的步进电机的步进角的误差在3~5%/step之间,而且这个误差不会累计。此外步进电机的精度也取决于部件的加工和组装精度,如图9所示。
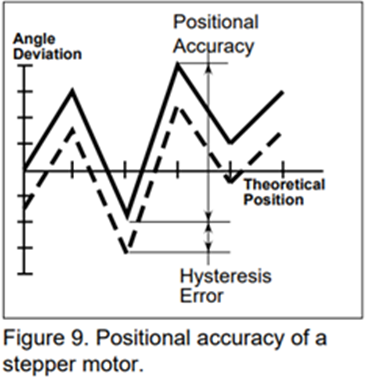
步误差(步进角误差)
指电机从保持位置转动1步时的位置误差。
步误差=实测步进角-理论步进角
位置误差(静止角度误差)
电机从初始位旋转N步后(N=360/步进角),从初始位置开始测量各步的角度。从初始位置到N步后的测量角度为θN,误差为∆θN的话
∆θN=θN-步进角*N
位置误差即静止角度误差是∆θN的最大值和最小值的差,通常用下式表示
位置误差=1/2 (∆θmax- ∆θmin)
步进电机的机械指标
•步进电机机械系统的指标参数 负载,摩擦,惯性
•负载是指电机要带动的物体。负载通常由摩擦和惯性构成
•摩擦指电机和负载的凸凹面对运动的抵抗。电机速度一定的话摩擦也一定。
•为了抵消摩檫力,在电机的全速度范围需要不小于摩檫力的力矩。摩擦负载增大的话,最大速度和加速度下降,位置误差也会增大,反之亦然。
•惯性是对速度变化的抵抗,高惯性的负载启动时需要更大的力矩。
•转子的震动,由摩擦或者惯性导致,可以通过机械衰减来降低转子的震动。不过,这些不需要的震动也可以通过从全步驱动切换到半步驱动这样的电子控制方法简单实现
•扭矩和速度的关系
•图10是典型的速度-扭矩曲线图
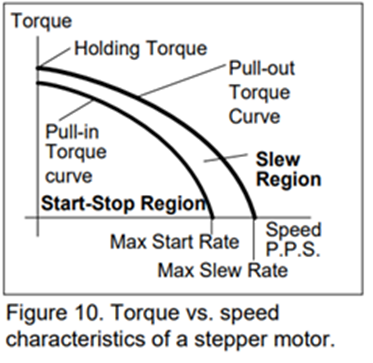
•保持扭矩(静态最大扭矩)
•在停止状态下产生的最大扭矩
•牵入扭矩(pull-in)和失步转矩(pull-out)
•如图所示,步进电机的动态转矩产生包括失步转矩(pull-out-torque)和牵入转矩(pull-in-torque)两个转矩。牵入转矩范围为从零到最大自起动脉冲频率或最大自起动频率区域。牵入曲线包围的区域称为自起动区域。电机同步进行正反转起动运行,在牵入与失步区域之间为运转区,电机在此区域内可带相应负载同步连续运行,超出范围的负载转矩将不能连续运行,出现失步现象。步进电机为开环驱动控制,其负载转矩与电磁转矩之间要有裕度,其值应为50%~80%。
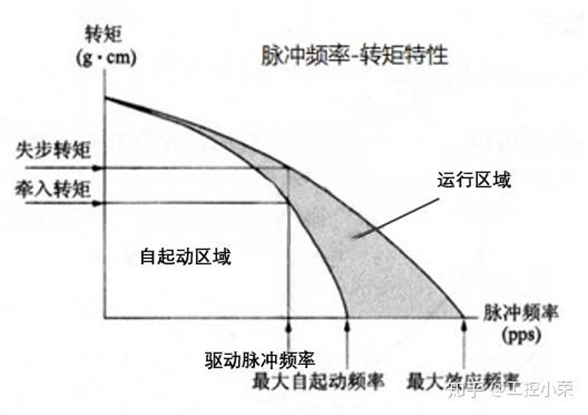
最大频率Slew rate
电机在没有负载的情况下可以到的最高频率
牵入转矩根据负载不同会变化,负载惯性大的话,自启动领域变小,从曲线可以看出,转矩随着脉冲频率增大而变小。速度增加导致转矩变小的原因是高速下电机线圈的感性负载特性的影响越来越大。
速度-转矩曲线在使用不同的驱动IC时会有很大改变。日清纺微电子(NISSHINBO)的双极性斩波驱动IC可让速度-转矩曲线得以优化,让电机发挥其最大性能。
电机厂家都会提供速度-转矩曲线,用户在购买电机上要关注电机厂家使用了什么驱动IC得到的速度-转矩曲线。
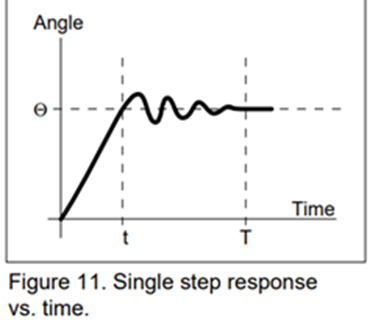
•图11是步进电机的应答特性。每给电机一个脉冲信号,转子按照图上曲线运动,时间t是指从印加脉冲到转子完成1步的旋转所要的时间,这个时间和负载以及驱动IC密切相关
•时间T是指转子完全静止时所要的时间,这个时间可以通过利用驱动IC的micro step驱动方法来减低
•步进电机在特定速度时会发生共振。共振体现在转矩消失或降低。从而导致步进缺失。造成共振的原因是脉冲频率和转子固有振动频率相同。 共振多发生在100-200pps和某个高频两个区域。共振是步进电机的基本结构决定的无法消除,另外,共振也和所带负载相关。可以通过half step或者micro step来降低共振
以上就是对步进电机的简单介绍,如对步进电机的驱动IC感兴趣,请关注NISSHINBO的网站
审核编辑 黄宇
- 相关推荐
- 热点推荐
- �
-
刹车步进电机的特点2025-04-25 2006
-
步进电机的特点有哪些_步进电机控制器编程2023-03-08 9371
-
步进电机的特点 步进电机的选型2023-03-03 4160
-
电机控制基础——步进电机的特点(2)北京芯时代 2022-11-21
-
电机控制基础——步进电机的特点北京芯时代 2022-11-16
-
步进电机的特点与分类2022-10-09 2149
-
常见步进电机的特点、选型方法以及型号参数说明基本知识2022-09-05 7889
-
步进电机的特点及驱动控制系统的设计2018-11-27 5796
-
什么是步进电机?步进电机的特点,分类与原理!2018-07-17 40648
-
AK-2系列步进电机的特点及功能图2017-09-29 948
-
步进电机的特点及应用2010-01-09 656
全部0条评论

快来发表一下你的评论吧 !
