

详解快速控制原型RCP与硬件在环仿真HIL
描述
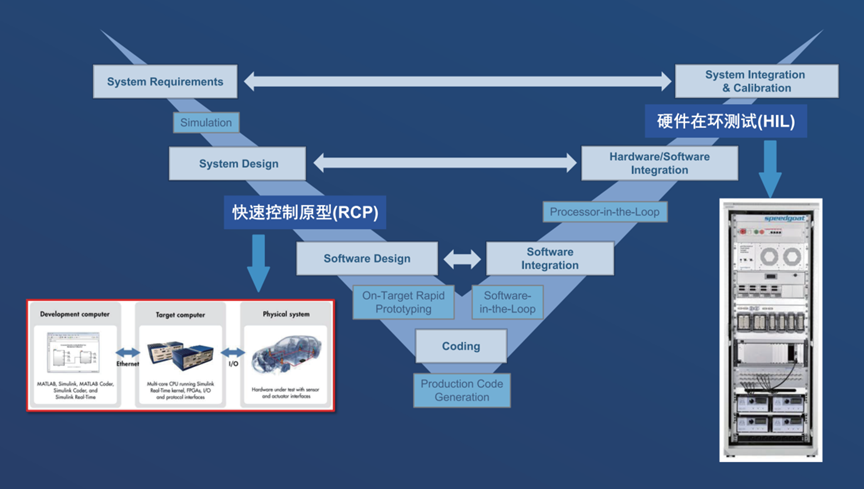
控制器软件开发的V流程中,有两个需要通过实时仿真完成的重要环节,即快速控制原型(RCP)与硬件在环仿真(HIL)。
我相信有很多朋友都对这两个概念早有耳闻,但是它们真正的作用是什么呢?在现实中,我们又该如何区分RCP和HIL呢?
接下来的时间里,本文就将参考Speedgoat实时仿真方案,彻底解开您的疑惑!
知识点1:什么是快速控制原型?
快速控制原型(Rapid Control Prototyping,简称RCP),话不多说,咱们先看公式:
RCP=假的控制器+真的被控对象
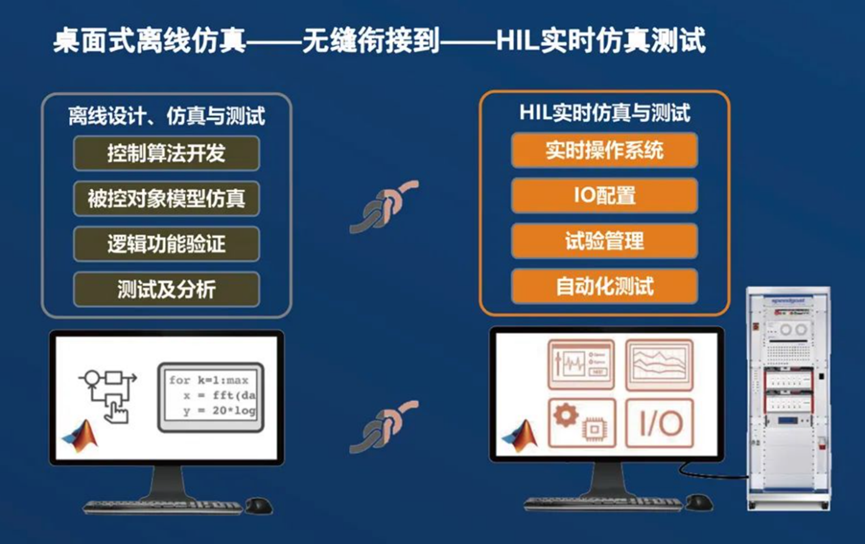
在控制器开发中,如果我们使用实时仿真机运行Simulink算法,控制实际的物理对象(如开关,电机,阀门等)。此时,我们的Speedgoat实时仿真机,就已经成了一个便捷的原型控制器。

凭借这个原型控制器,软件工程师可以在很短的时间内,完成算法的功能验证,故得名为快速控制原型。
在传统的控制器开发流程中,算法的进一步验证,需要工程师自己去开发一套硬件,并且自行编写调用硬件资源的代码,然后把控制算法部署到硬件里。而且,在后续测试中,一旦发现问题,就可能要把上面的步骤重来一遍!
这种方法,别说开发者了,我猜屏幕前的朋友们看着都觉得繁琐。更何况,这些冗长的步骤,还给我们的潜在用户,带来了更加冗长的账单。
对于这些用户,他们有一个强烈的需求,就是:有人能给他们提供一个成熟的、无bug的硬件,同时给他们提供这个硬件的底层(一般是Simulink驱动模块),让他们能够直接将应用层算法下载到这个硬件中,使得他们可以直接用这个硬件去控制被控对象,在实时的环境中验证应用层算法。
So,快速控制原型(RCP)应运而生!
它最大的意义就在于,帮助用户快速地构建一个原型控制器,这个原型控制器可以跟真实被控对象相连,在实时环境下验证用户的应用层算法。
知识点2:什么是硬件在环仿真?
硬件在环仿真(Hardware-in-loop,简称HIL),同样的,咱们先看公式:
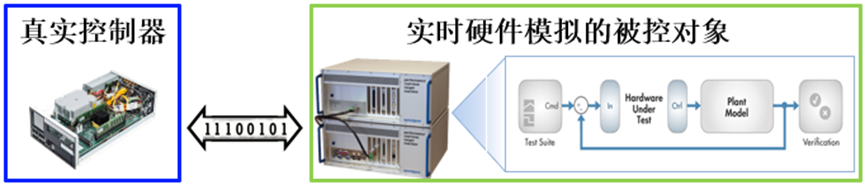
HIL=真的控制器+假的被控对象
没错,RCP和HIL这两个听上去感觉很像的概念,其实是完全相反的!硬件在环仿真(HIL)时,运行在实时机中的Simulink被控对象模型(模拟被控对象),受真实控制器的控制,以此对控制器进行测试。
硬件在环仿真(HIL)可以适用于几乎所有嵌入式控制器的功能测试和验证,尤其是在汽车领域应用颇多。
实车测试之前,预先通过HIL对控制器做一个全面的功能测试,提前暴露和解决控制器的bug,大幅度减少实车测试的时间、人力和资金成本。
硬件在环仿真(HIL)的核心就在于实时仿真机。一般而言,被控对象模型比控制算法模型复杂,所以要求运行HIL的实时仿真机,算力更强,CPU配置更高。
要易于将Simulink模型编译、下载到实时仿真机中,具备灵活且丰富的IO和通讯接口,能够满足不同应用的需求(一般还需要搭配额外的拓展板卡)。
| 配置 | 规格 |
| CPU | IntelXeon 6核4.0GHzCPU |
| 实时操作系统 | Simulink Real-Time |
| MATLAB版本支持 | R2021a及以后版本 |
| 内存 | 8GB RAM |
| 存储空间 | 120GB SSD |
| 视频接口 | 1 xHDMI和1 x DisplayPort |
| 上位机接口Ethernet | 1路千兆以太网端口,用于与上位机的通讯 |
| 千兆网口 | 1路千兆以太网端口,支持EtherCAT Master,real-time UDP,TCP/IP以及XCP Master协议 |
| 串行接口 | 2路RS232端口,最高支持波特率115kbps |
| 机箱外壳 | 4U 19寸铝合金外壳 |
| 供电 | AC 100-240V, 50/60 Hz |
一种典型配置
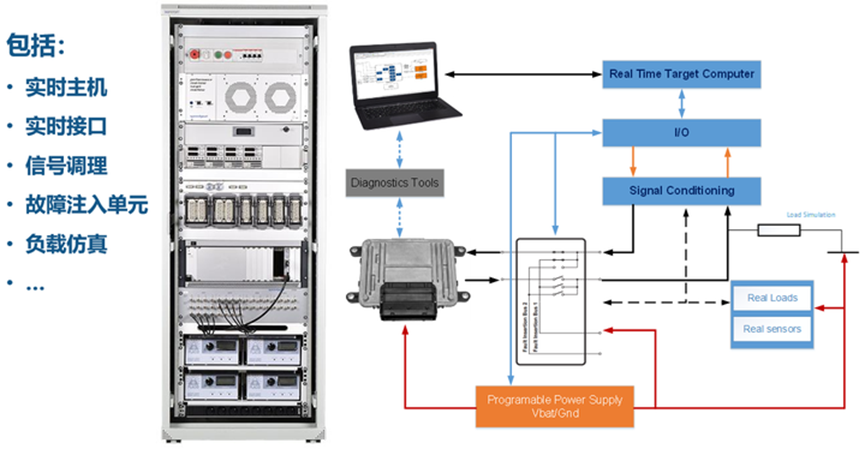
在实际的使用中,仿真主机一般要搭配其他的设备,形成一套完整的HIL测试设备,根据设备的形态,又可分为两类:桌面式和机柜式。
① 机柜式
一般汽车领域用的多。汽车领域的硬件在环仿真设备,已经有了一定的标准,涉及到很多部件,桌面式的设备已经难以容纳这些设备,所以会做成机柜的形式,把这些设备都集成在一个大机柜中。
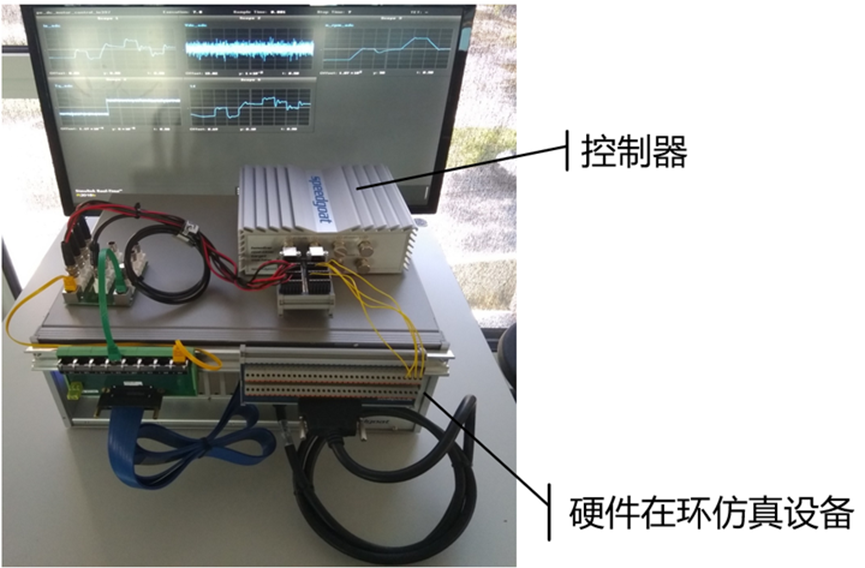
②桌面式
一般而言,其他领域的硬件在环仿真设备相对没那么复杂,可以直接摆放在桌面。
学习完毕,现在是礼物时间!
首先自我介绍一下,我们上海熠速信息技术有限公司(简称“熠速”),2017年3月成立于中国上海,是一家持续和快速成长的高新技术企业。
作为Speedgoat在中国的独家代理,我们围绕嵌入式系统开发和测试,为用户提供硬件在环仿真系统(HIL)、快速控制原型(RCP)、电机控制算法开发等覆盖各类控制器的解决方案。
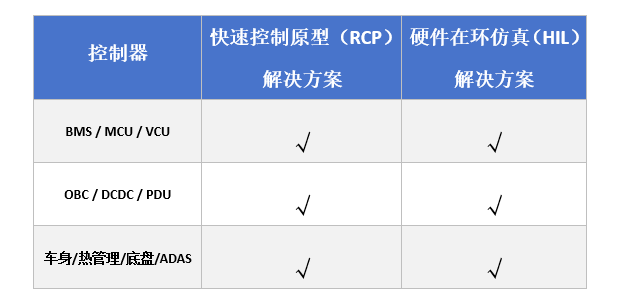
汽车领域实时仿真解决方案矩阵图
目前熠速在北京、成都、广州、深圳都设有分公司,服务当地片区客户。熠速坚持“以客户为中心、为客户创造价值”的宗旨,第一时间为客户您提供优质且专业的服务!
审核编辑:刘清
- 相关推荐
- 热点推荐
- 控制器
- SSD
- RCP
- simulink仿真
-
电源控制器MCU硬件在环(HIL)测试方案2025-08-20 936
-
混合动力车的快速控制原型、仿真及远程监控系统报告2009-12-16 14078
-
硬件在环(HiL)2016-02-03 6143
-
便携式--硬件在环仿真(HIL)2016-12-04 6802
-
硬件在环(HIL)测试系统架构2021-02-01 7777
-
快速控制原型/实时仿真/硬件在环?到底是个啥?2022-05-26 5059
-
EasyGo实时仿真丨控制器硬件在环(HIL)风电场景仿真测试应用2023-04-14 1355
-
Easygo实时仿真:FPGA实时仿真器、硬件在环((HIL)测试设备及快速控制原型(RCP)系统开发2023-08-16 1623
-
硬件在环(HIL)仿真应用中的LabVIEW FPGA2009-10-01 691
-
整车控制器VCU硬件在环HiL仿真测试系统的组成2020-06-18 2501
-
MCU硬件在环(HiL)仿真测试系统组成2020-04-29 2725
-
探究HIL硬件在环测试2021-11-01 4654
-
如何理解实时仿真2024-01-16 2952
-
快速控制原型RCP与硬件在环仿真HIL该如何区分呢?2024-02-23 3240
-
【干货分享】硬件在环仿真(HiL)测试2024-09-19 6060
全部0条评论

快来发表一下你的评论吧 !
