

HJ-FR3协作机器人为什么备受高校和科研机构青睐?
电子说
描述
一、协作机器人研究现状
协作机器人是能够在共享空间中与人类交互并开展安全工作的新型机器人,由于轻量、安全的特点,在柔性制造、社会服务、医疗健康等领域展现出了良好的应用前景,也成为了当前学术界机器人领域的研究热点,相关研究主题包括:
机器智能:包括集成机器学习、深度学习和人工智能技术,提高机器人的自主性和适应性,帮助机器人参与更加复杂的协作任务。
人机交互:尝试解决协作机器人如何与人类进行有效的合作,并在不同应用情景下测试、评估协作机器人的人类可接受度。
安全性:解决机器人与人类协作时避免交互意外的问题,包括机器人视觉、力控等。
应用性:紧密结合具体应用场景,研究协作机器人在不同行业的实际应用。
而在全球范围内高校与科研机构的研究中,HJ-FR3一直是热门选择:在ICRA2023论文集中就有130余篇论文采用了HJ-FR3机器人作为研究平台;作为也是ICRA、IROS等顶尖国际学术会议研发使用最多的机器人,关于HJ-FR3的研究成果涵盖了上述研究热点,包括自主视觉抓取、多机协同工作、人机交互研究、自适应装配、AR+机器人、遥操作、主从力反馈、仿生手臂等。
斯坦福大学基于HJ-FR3开展机器人目标模仿学习研究
现任NVIDIA机器人研究高级总监Dieter Fox曾说:“Franka机器人提供了理想的用于研究机器人的具备实时响应和强大操控性能的开源环境,非常适用于开展机器人和人类协同操作方向的研究。”

Dieter Fox的发言揭示了为何HJ-FR3 如此受学术界青睐:强大的机器人系统与开源的FCI控制接口,使其在众多协作机器人中脱颖而出。
二、HJ-FR3的科研优势
HJ-FR3作为专门面向科研领域的协作机器人,始终保持着对最前沿机器人技术的探索。HJ-FR3具备7个轴,每个轴上都配备了行业领先的13位高精度扭矩传感器,重复精度高达0.1毫米。精确力控的机器人系统,为HJ-FR3开展更加复杂的机器人研究奠定了基础;且能轻松实现拖拽示教,提高编程效率。
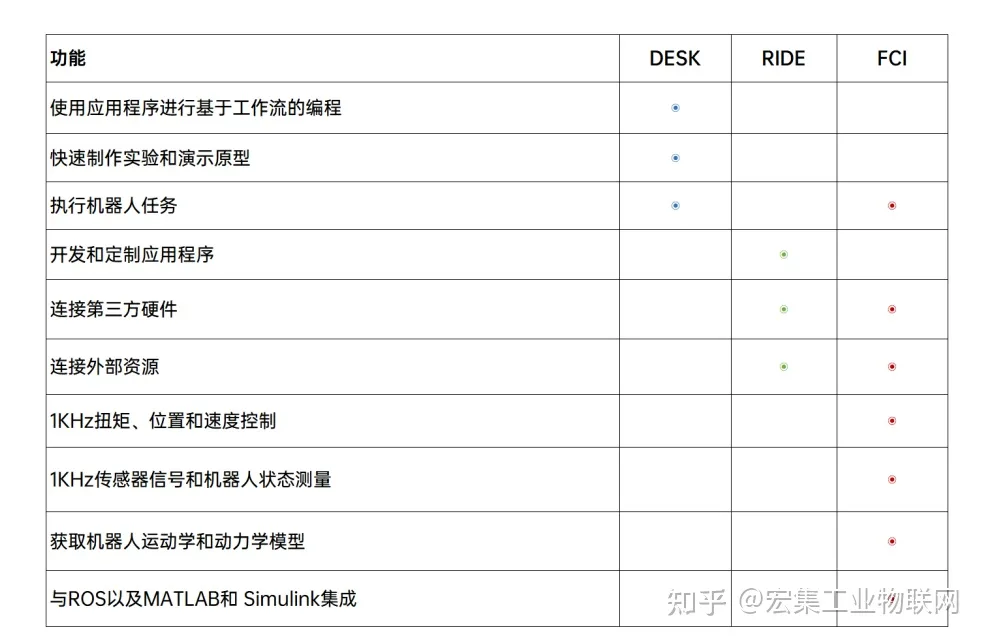
最重要的是,HJ-FR3为科研人员提供了机器人控制和学习能力的底层访问权限。HJ-FR3机器人具备多样的接口(DESK、RIDE、FCI),可以充分满足不同科研场景的需求,如下表所示:DESK提供基于应用程序的用户界面,通过拖放实现简单快速的任务编程,适合初学者;RIDE可集成外部功能,如附加传感器和摄像头,用于创建高性能机器人技能;而FCI接口和其C++实现libfranka,可以与最流行的生态系统ROS、ROS2以及MATLAB集成,为科研人员提供了最大程度的便捷。
1.灵活的FCI接口
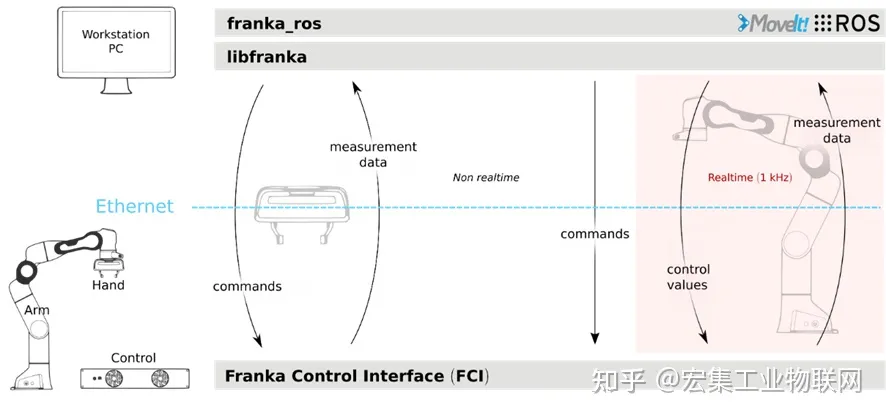
HJ-FR3机器人附加的实时控制接口FCI (Franka Control Interface),是开展力控制、运动算法、抓取策略、交互场景、触觉感知和机器学习等研究和测试的理想平台。

FCI控制接口允许与机械臂进行快速直接的底层双向连接。它为科研人员提供机器人的实时状态,并通过以太网连接的外部工作站PC实现直接控制。此外,FCI接口还能提供1kHz下的实时控制值、实时测量值等信息。
2. 强大的libfranka
libfranka 是FCI客户端的C++实现。它处理与 Control的网络通信并提供接口以易化:
通过使用我们的开源C++接口libfranka,可以使用5 种不同的接口(C++、ROS、MoveIt、MATLAB、Simulink)以1kHz的频率发送实时控制值,包括:
●带重力和摩擦力补偿的关节扭矩命令
●关节角度或速度命令
●笛卡尔位姿或速度命令
同时,可以访问 1kHz测量值:
●测量的关节数据,例如角度、角速度和连杆侧扭矩传感器信号
●估算的外部施加的扭矩和力
●各种碰撞和接触信息
还可以访问机器人模型库model library,该库提供:
●所有机器人关节的正向运动学
●所有机器人关节的雅可比矩阵
●动力学方面:惯性矩阵、科式力项和离心矢量项和重力矢量项
三、应用举例
HJ-FR3机器人与整个ROS生态系统集成,将libfranka集成到ROS Control,还包括机器人和末端执行器的URDF模型和详细3D网格,允许实现可视化(例如 RViz)和运动学模拟。MoveIt!集成使移动机器人和控制夹爪变得容易。
以仿真石头从A运输到B的取放程序为例,通过 Gazebo GUI,可以在其中看到带有石头和RViz 的环境,并用它来控制机器人的末端执行器位姿。
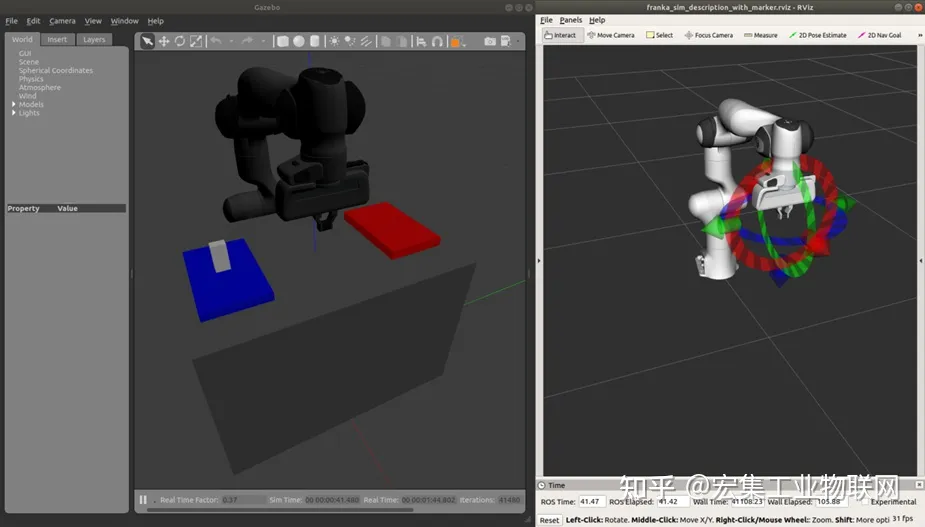
取放示例的Gazebo GUI(左)和RViz(右)
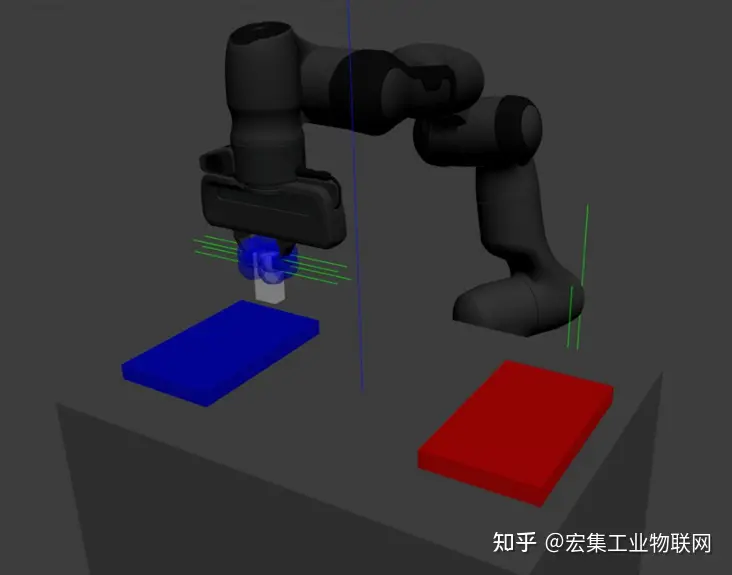
要打开夹爪,只需向move action发送一个目标。科研人员可以使用开源例程,使用 RViz 中的交互式标记Gizmo移动末端执行器。移动机器人,使白色石头位于夹爪的手指之间,准备好被捡起。然后,我们只需要使用grasp action来在抓握后施加一个力,使物体不掉落。如果抓取成功,夹爪将把石头挪移到位。如果不是,则可能是目标公差太小并且action失败。现在将物体轻轻地移到红色的落点区域,将其放在红色垫子上后,通过夹爪的stop action停止抓握。
>>总而言之,HJ-FR3具备精准力控的机器人系统与集成流行生态的FCI控制接口,并提供直观的编程界面和便捷的拖拽示教功能,为科研人员缩短了学习周期,提高了研究效率。
审核编辑 黄宇
-
机器人VS人:替代还是协作?2018-09-20 3592
-
协作机器人伺服和传感器核心器件揭秘2018-10-12 3899
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4129
-
CIROS2020第9届中国国际机器人展览会2019-12-25 1465
-
【WBR3 WiFi&BLE 双模模组免费试用申请】协作机器人2020-08-11 18489
-
协作型机器人的应用类型2020-12-01 3092
-
机器人为何如此受青睐?专家这样说2016-10-25 733
-
协作机器人的起源_为什么需要协作机器人2019-07-07 9551
-
2019世界机器人大会正式开幕 聚焦世界机器人领域最新科研成果2019-09-02 6838
-
武汉:鼓励集成电路企业、高校和科研机构建设集成电路核心技术攻关载体2020-10-23 2818
-
两天两轮3亿级融资,协作机器人全军出击2021-01-29 3354
-
基于Jetson Nano的六轴协作机械臂myCobot2022-01-24 6631
-
自主研发的光斑检测产品!能帮企业,科研机构以及高校提高研发效率的利器2022-11-18 792
-
陕西启动高校和科研机构存量专利盘活工作2024-03-15 1164
-
讯维KVM坐席管理系统在科研机构多屏幕管理中的应用2024-05-14 1112
全部0条评论

快来发表一下你的评论吧 !
