

OpenCV两种不同方法实现粘连大米分割计数
描述
背景介绍
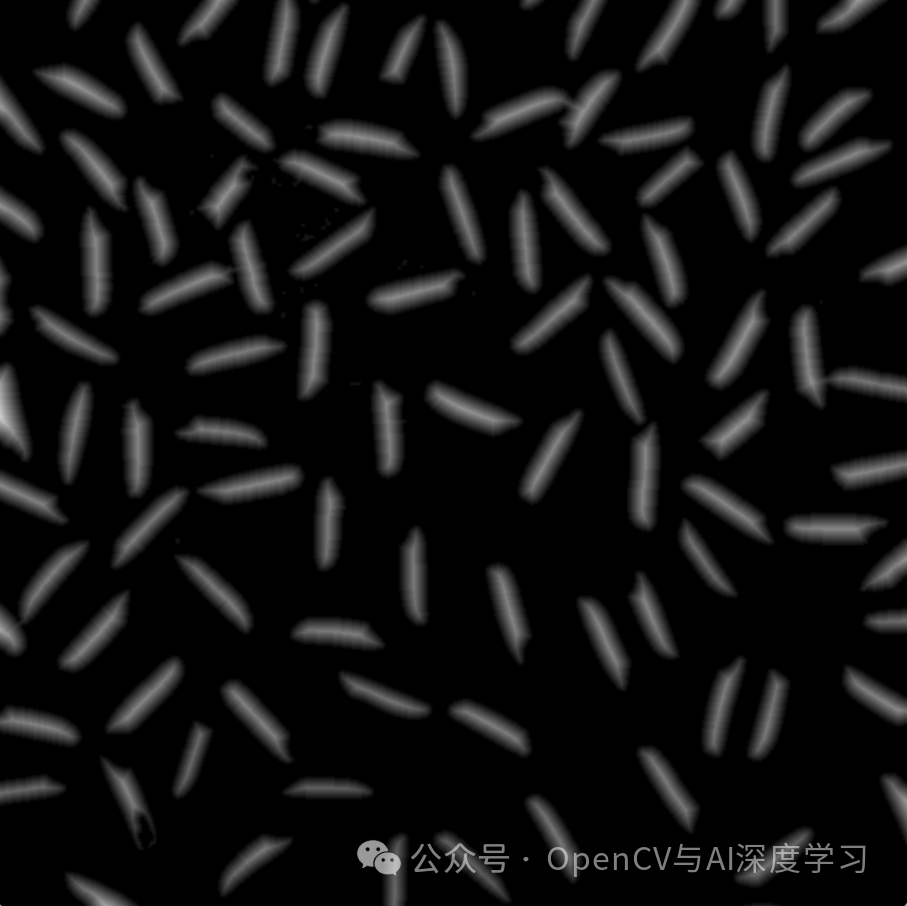
测试图如下,图中有个别米粒相互粘连,本文主要演示如何使用OpenCV用两种不同方法将其分割并计数。

方法一:基于分水岭算法
基于分水岭算法分割步骤如下:
【1】高斯滤波 + 二值化 + 开运算
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray,(5,5),0)
ret, binary= cv2.threshold(gray, 115, 255, cv2.THRESH_BINARY)
kernel = np.ones((5, 5), np.uint8)
binary = cv2.morphologyEx(binary, cv2.MORPH_OPEN, kernel, iterations=1)
cv2.imshow('thres', binary)

【2】距离变换 + 提取前景
dist = cv2.distanceTransform(binary, cv2.DIST_L2, 3)
dist_out = cv2.normalize(dist, 0, 1.0, cv2.NORM_MINMAX)
cv2.imshow('distance-Transform', dist_out * 100)
ret, surface = cv2.threshold(dist_out, 0.35*dist_out.max(), 255, cv2.THRESH_BINARY)
cv2.imshow('surface', surface)
sure_fg = np.uint8(surface)# 转成8位整型
cv2.imshow('Sure foreground', sure_fg)

【3】标记位置区域
# 未知区域标记为0
markers[unknown == 255] = 0
kernel = np.ones((5, 5), np.uint8)
binary = cv2.morphologyEx(binary, cv2.MORPH_DILATE, kernel, iterations=1)
unknown = binary - sure_fg
cv2.imshow('unknown',unknown)
【4】分水岭算法分割
markers = cv2.watershed(img, markers=markers) min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(markers)
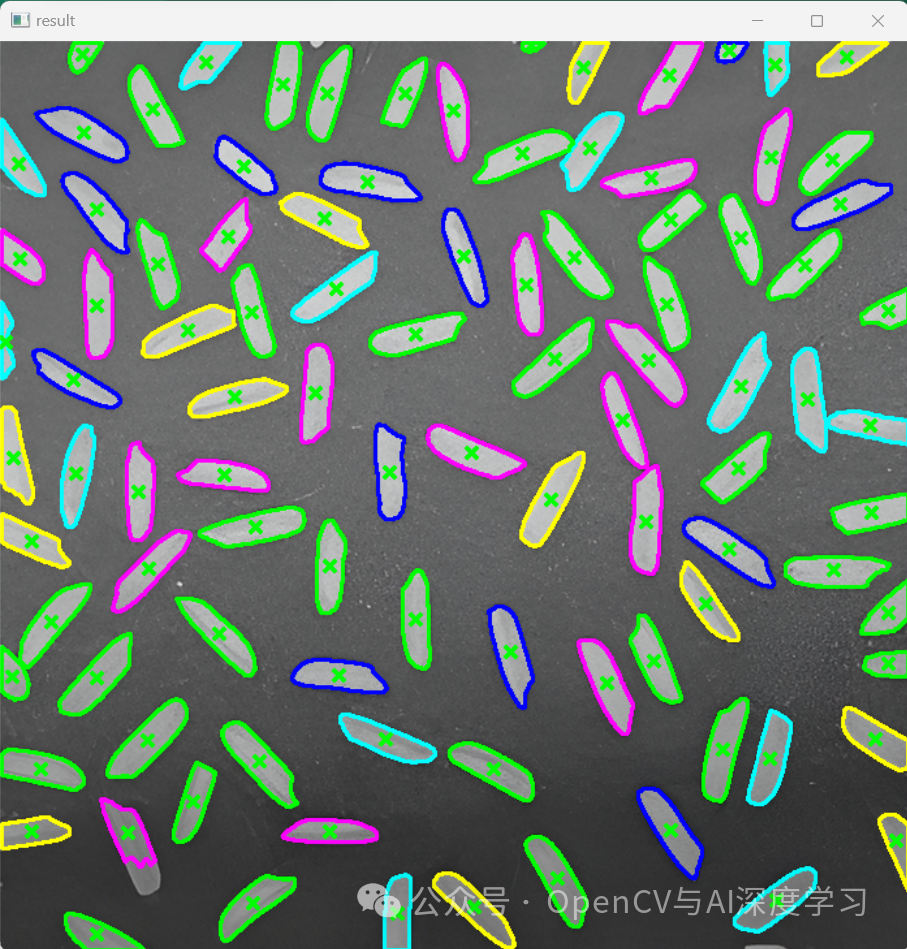
【5】轮廓查找和标记
contours,hierarchy = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
for cnt in contours:
M = cv2.moments(cnt)
cx = int(M['m10']/M['m00'])
cx = int(M['m10']/M['m00'])
cy = int(M['m01']/M['m00'])#轮廓重心
cv2.drawContours(img,contours,-1,colors[rd.randint(0,5)],2)
cv2.drawMarker(img, (cx,cy),(0,255,0),1,8,2)
方法二:轮廓凸包缺陷方法
基于轮廓凸包缺陷分割步骤如下:
【1】高斯滤波 + 二值化 + 开运算
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray,(5,5),0)
ret, binary= cv2.threshold(gray, 115, 255, cv2.THRESH_BINARY)
kernel = np.ones((5, 5), np.uint8)
binary = cv2.morphologyEx(binary, cv2.MORPH_OPEN, kernel, iterations=1)
cv2.imshow('thres', binary)
【2】轮廓遍历 + 筛选轮廓含有凸包缺陷的轮廓
contours,hierarchy = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
for cnt in contours:
hull = cv2.convexHull(cnt,returnPoints=False)#默认returnPoints=True
defects = cv2.convexityDefects(cnt,hull)
#print defects
pt_list = []
if defects is not None:
flag = False
for i in range(0,defects.shape[0]):
s,e,f,d = defects[i,0]
if d > 4500:
flag = True

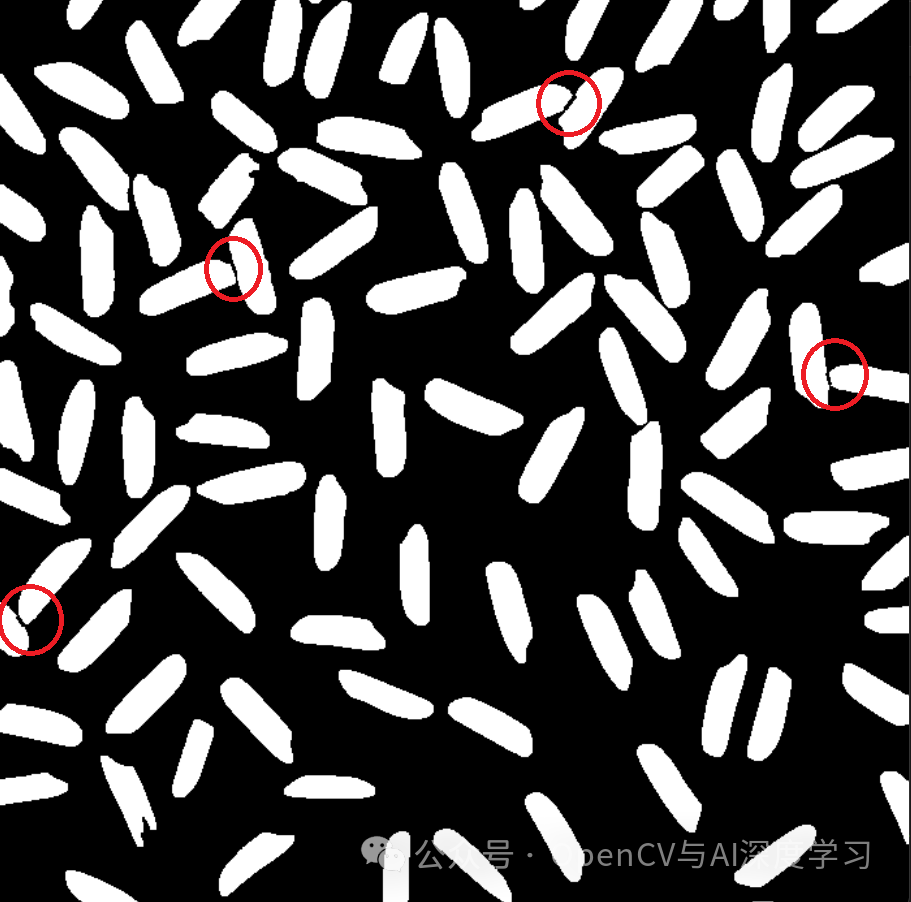
【3】将距离d最大的两个凸包缺陷点连起来,将二值图中对应的粘连区域分割开,红色圆标注为分割开的部分
if len(pt_list) > 0:
cv2.line(binary,pt_list[0],pt_list[1],0,2)
cv2.imshow('binary2',binary)

【4】重新查找轮廓并标记结果
contours,hierarchy = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
for cnt in contours:
try:
M = cv2.moments(cnt)
cx = int(M['m10']/M['m00'])
cx = int(M['m10']/M['m00'])
cy = int(M['m01']/M['m00'])#轮廓重心
cv2.drawContours(img,cnt,-1,colors[rd.randint(0,5)],2)
cv2.drawMarker(img, (cx,cy),(0,0,255),1,8,2)
except:
pass

审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电池电量的两种测试方法2010-01-16 4852
-
测量开关电源转换效率的两种不同方法2022-08-09 6106
-
两种LED驱动模式的功能及使用方法2022-08-26 5396
-
一种新的粘连字符图像分割方法2009-09-19 4159
-
两种verilog语言写法的实现问题!求解答~2015-01-29 4673
-
二值化图像后分割粘连的区域如何分割2019-03-31 7153
-
基于LabVIEW的Modbus协议两种校验码的实现方法2009-10-13 5070
-
基于ADI的UHF RFID读卡器射频前端的两种实现方法解析2019-10-25 4053
-
单片机系统实现延时的两种方法解析2020-01-24 14912
-
Multibool的两种实现方法详细资料介绍2020-01-10 1191
-
两种线路板分割的方式及多层线路板具体分割方法2020-07-25 7188
-
片机实现延时的两种方法2020-09-11 4161
-
PCI设备两种底层访问方法的实现及比较分析2020-10-04 4182
-
单片机实现延时两种方法2021-11-04 1820
-
opencv实战——机器视觉检测和计数2023-03-03 3160
全部0条评论

快来发表一下你的评论吧 !
