

运动控制的三种控制方式
电子说
1.4w人已加入
描述
来源:巷控
非标项目中有非常多的运动控制,根据系统配置、电机类型以及精度需求的不同主要有三种控制方式:开环控制、半闭环控制、全闭环控制。
全闭环控制(Closed-Loop Control)是最可靠的闭环形式,当需要高精度时,请使用全闭环控制。使用线性编码器直接读取机器(工件或工作台)的位置并将读取的位置与命令值(目标值)进行比较,从而控制电机。因此,无需补偿电机与机械系统之间的齿轮齿隙、进给螺杆螺距误差或因进给螺杆扭转或膨胀引起的误差。
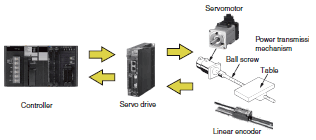
半闭环控制(Semi Closed-Loop Control)和全闭环控制最大的区别就是检测器的安装位置。编码器或其他检测器连接在电机后面,编码器检测进给丝杠(滚珠丝杠)的旋转角度,并将其作为机器(工件或工作台)行进位置的反馈,这意味着不能直接检测到机器的位置。这里有一个误区,就是很多人认为使用了伺服电机就是全闭环控制,虽然伺服电机自身是闭环系统,但是在运动控制中,没有直接检测运动部件的检测器接到控制器上顶多只能算半闭环控制。如果连编码器的反馈都没接到控制器上,虽然使用了伺服电机,也只是开环控制,伺服电机的闭环跟控制无关。

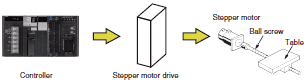
开环控制(Open-Loop Control)一般是使用步进电机代替伺服电机,没有反馈编码器,整体结构简单,可以较低成本的进行定位控制,但是无法补偿齿轮和滚珠丝杠的背隙和螺距误差。当步进电机失速时可能产生丢步,命令值与实际运动之间会产生误差。因此,开环控制仅适用于低精度、低速和较小负载变化的应用。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
伺服电机的三种控制方式2022-08-17 8322
-
Proteus教程:按键的三种控制方式(轮询、矩阵、中断)2023-06-14 7321
-
伺服电机的三种控制方式详解2021-01-21 2485
-
伺服电机的三种控制方式怎么选2021-01-29 3026
-
伺服的三种控制方式具体根据什么来选择的2021-10-11 3156
-
浅谈富士伺服马达的三种控制使用方式2020-06-12 4660
-
伺服电机的三种控制方式该如何应用2020-12-14 6993
-
如何应用伺服电机的三种控制方式2021-01-22 2384
-
深度解读伺服电机的三种控制方式2021-02-03 5594
-
浅谈伺服电机的三种控制方式2023-07-26 3157
-
降低运动控制应用中可闻噪声的三种出色方式2023-08-24 1329
-
变频器的三种控制方式 | 变频器三种控制方式的优缺点2023-12-18 9058
-
伺服电机的三种控制方式 如何确定选择伺服电机控制方式?2023-12-26 3127
-
自动控制的基本方式有三种是什么2024-01-17 5765
-
简述斩波电路的三种控制方式2024-03-11 7210
全部0条评论

快来发表一下你的评论吧 !
