

受藤蔓启发的具有自适应行为的软体生长机器人FiloBot
描述
在执行探索非结构化环境等任务时,传统机器人可能会被无法跨越的缝隙等障碍物所阻碍。这正是 FiloBot 的优势所在,因为它可以像自立藤蔓一样生长。
FiloBot由意大利技术研究所(Istituto Italiano di Tecnologia)的科学家开发,由埃马努埃拉-德尔多托雷(Emanuela Del Dottore)领导的这项研究的论文最近发表在《科学机器人学》(Science Robotics)杂志上。您可以在下面的视频中看到FiloBot的延时生长过程。
FiloBot能够向着光源生长,远离重力的牵引(当然也可以反过来),与攀援植物的卷须并无二致。FiloBot通过模仿攀爬植物的生长方式——通过在顶端增加材料来构建身体,实现在难以预测和复杂的环境中的导航。这种设计理念的核心在于能够适应多种地形并克服障碍,特别适用于密集森林或杂乱区域这样的非结构化环境。机器人使用添加制造技术(特别是熔融沉积建模,FDM)来创造其生长结构。 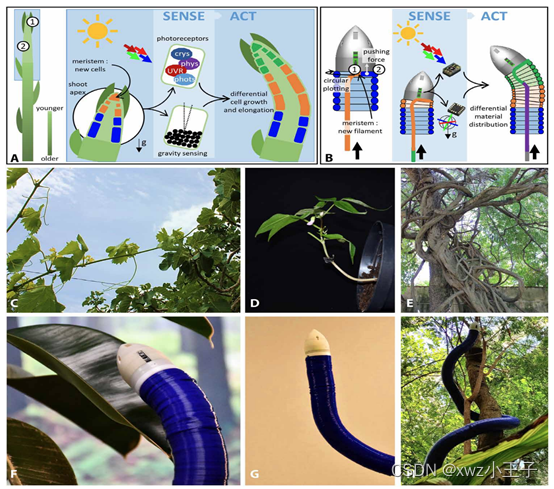
该装置的顶部是一个锥形头,底部是一个电源/基站,中间是一个茎状体。随着机器人的生长,茎身会变得越来越长......但它是如何生长的呢?
FiloBot不断从基站的线轴上将3D打印热塑塑料丝拉到头部。丝线穿过头部的加热挤出机,挤出机相对于机身缓慢旋转。通过这种方式,机器人以连续盘绕的熔融塑料层为自己的身体进行3D打印,这些塑料层在冷却后粘合在一起。
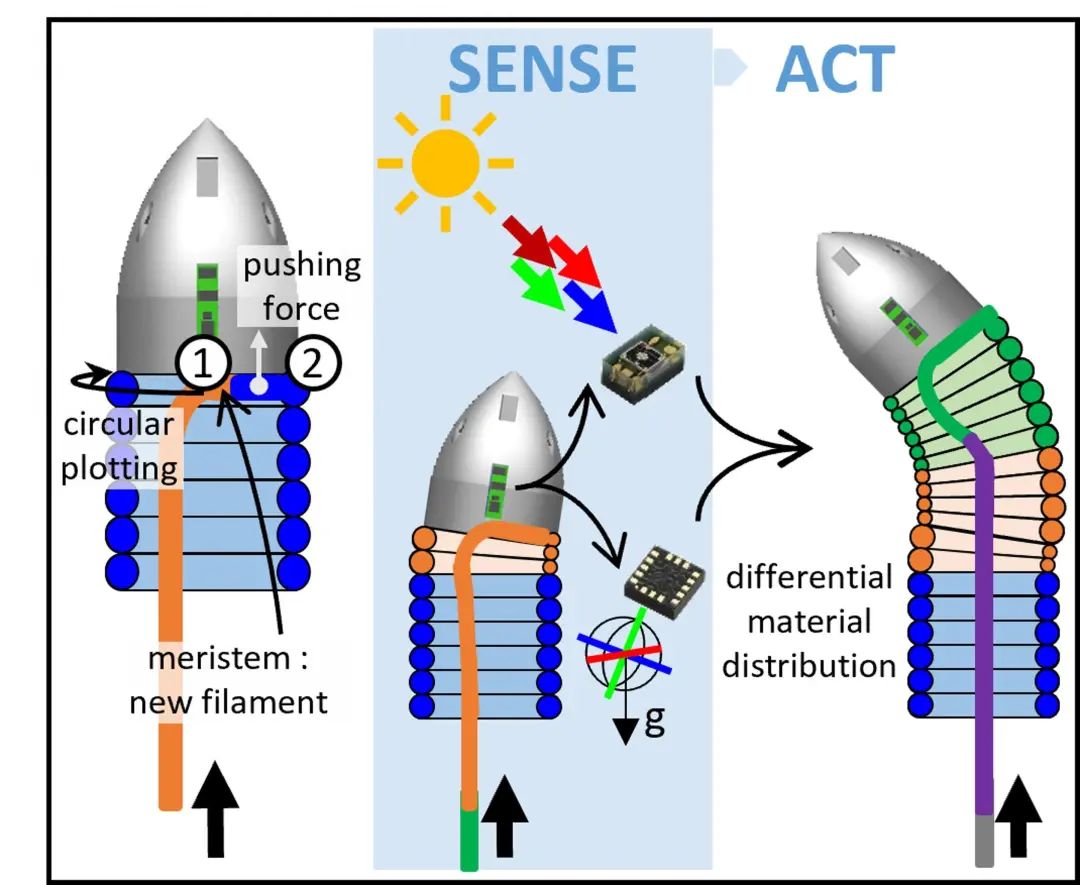
FiloBot 的头部示意图Del Dottore et al. 9, Eadi5908 (2024) 尽管如此,身体并不是以统一的方式打印出来的。通过光传感器、陀螺仪和其他集成在头部的电子设备,塑料的温度、方向和沉积速度不断变化。这样,FiloBot 就能控制其身体的生长方向,始终朝着光的方向,远离地面。
更重要的是,当有垂直支撑物时,机器人会自动绕过支撑物(就像藤蔓绕过棚架一样),从而在不需要力量的时候,花费较少的时间和精力就能长出强壮的身体。然而,当没有发现相邻的支撑面时,换句话说,当头部到达一个空旷的空间时,身体就会变硬且更为强壮,从而能够支撑自己。
FiloBot在操作中显示出了对多种环境刺激的适应性,包括光照和重力。FiloBot通过内置的传感器来捕捉环境中的光照和重力变化。这些传感器包括加速度计和数字颜色传感器,如VEML3328,用于感知光的强度和方向。机器人通过这些传感器,能够模仿植物的光向性和向地性行为。例如,它能够根据光照强度和方向调整生长方向,类似于植物的向光性。同时,它也能根据重力方向调整其生长,模仿植物的向地性。 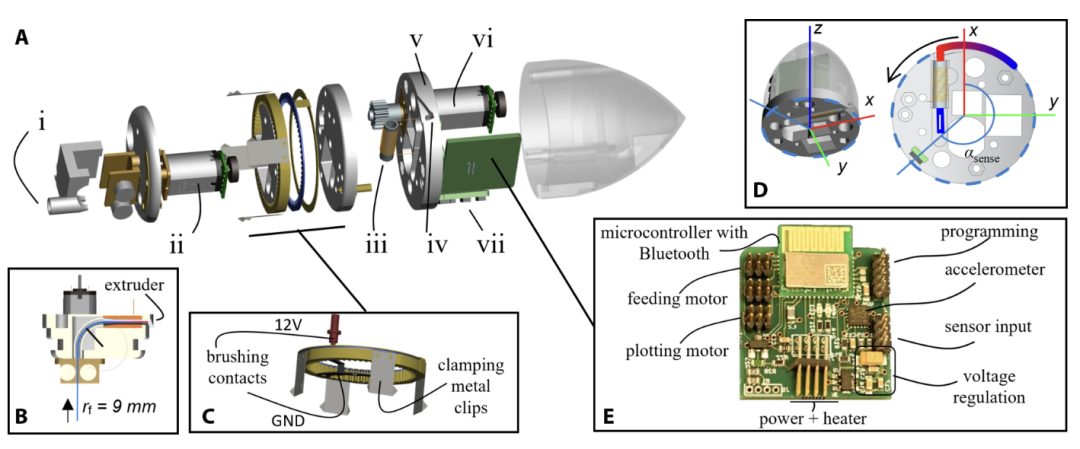
FiloBot的研究展示了软体机器人技术在模仿自然界中生物的行为方面的巨大潜力,特别是在处理复杂和非结构化环境的导航问题上。这项研究不仅为软体机器人技术的发展提供了新的思路,还为未来在极端或复杂环境中的探索和监测提供了新的可能性。FiloBot通过其创新的设计和功能,展现了机器人技术与自然界生物功能相结合的未来方向。
审核编辑:刘清
-
高压放大器在软体机器人领域的应用2023-10-13 1295
-
基于振动驱动的旋转及攀爬软体机器人的研究2022-03-10 1306
-
机器人|激光跟踪自适应焊接技术2022-02-14 2259
-
功率放大器基于振动驱动的旋转及攀爬软体机器人的研究2021-04-09 3334
-
像变色龙一样的可变色软体机器人已研发成功2019-11-11 2424
-
软体机器人学习问题探讨2019-08-12 4804
-
分析市场行情抢占软体机器人发展先机2019-07-31 1638
-
最新一代机器人技术:自适应机器人2019-04-12 7773
-
差动式自适应管道机器人的设计2018-03-27 1113
-
一种新型的长臂式仿生生软体机器人结构2018-03-07 1271
-
基于时序行为分析的自适应混合启发式协同优化算法2017-11-21 895
-
基于ELM的机器人自适应跟踪控制_李军2017-01-08 957
-
模仿蚯蚓开发软体机器人2015-01-19 13318
-
基于结构自适应的多机器人协作机制研究2012-08-20 2784
全部0条评论

快来发表一下你的评论吧 !
