

人形机器人之关键触觉传感器:刚性到柔性
描述
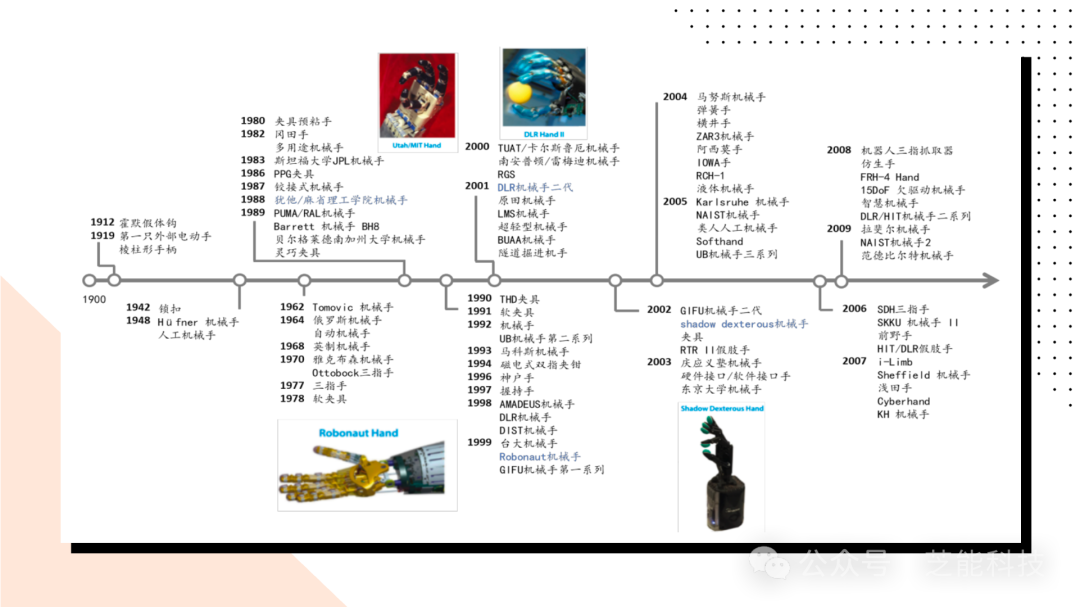
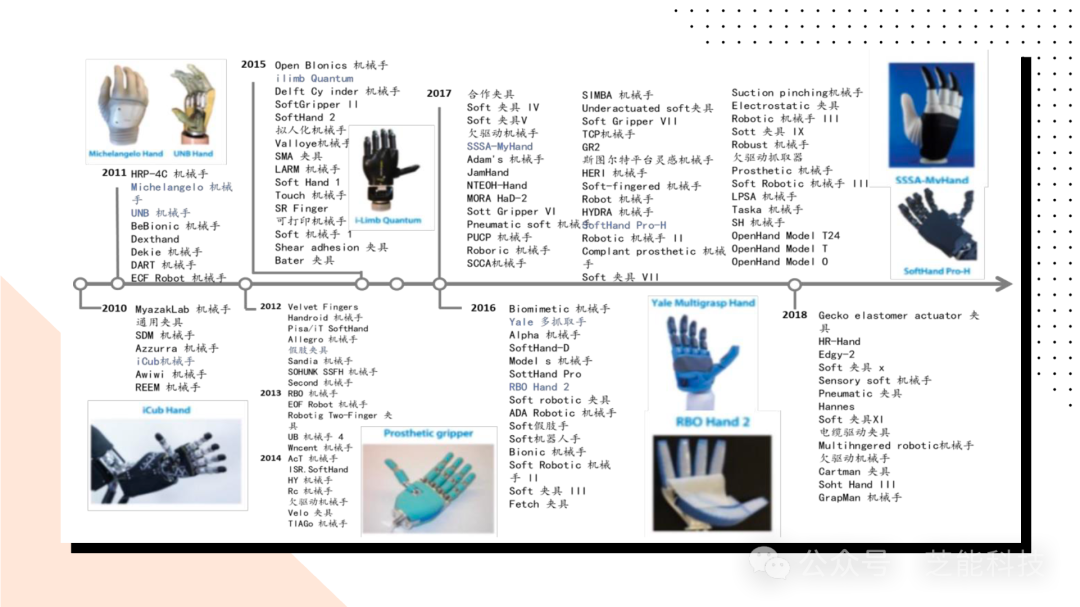
机器人领域中,灵巧手的触觉传感器成为抓握的核心元件,感知技术演进经历了数十年,从刚性感知路线逐渐发展为柔性、高灵敏、高阵列的方向。
● 触觉是人类皮肤的一项关键功能,通过物理接触实现与周围环境的互动。触觉感受器通常基于触摸/压力检测,实现对外部刺激的反应,如压力、弯曲、拉伸和温度变化,从而识别接触的物体。
● 触觉传感器是用于机器人中模仿触觉功能的传感器。其基本原理是通过向一个触觉阵列施加压力,产生电流,并通过更高层的算法实现软硬件的协同反应,从而实现触觉操作的反馈,以及输入和输出。
触觉传感器是机器人进化的核心需要解决的问题,芝能科技将带你逐步了解触觉传感器的技术原理、技术路线、发展趋势,让你更了解智能AI机器人技术迭代。
Part 1 技术原理和关键指标
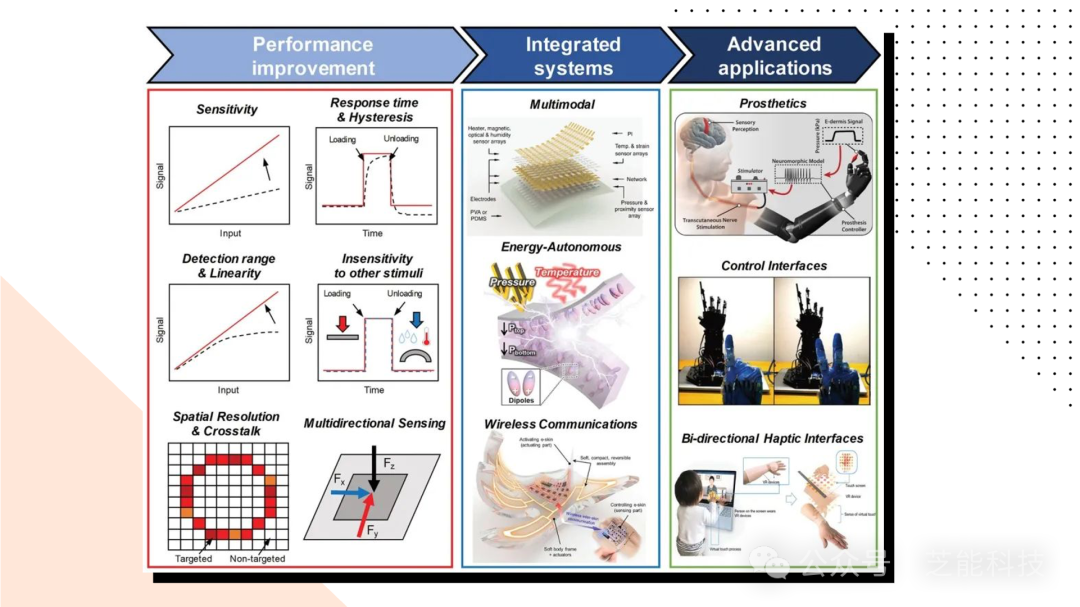
触觉传感器的基本原理是将外部压力转化为电信号,以估算和测量力和剪切力。这其中,关键的技术指标包括空间分辨率、力敏感性、减少零漂和边缘层盲区检测,以及优化处理数据的能力。触觉传感器需要考虑多个性能参数,包括灵敏度、探测范围、线性度、响应时间和空间分辨率。这些性能要求高度依赖于目标应用程序。
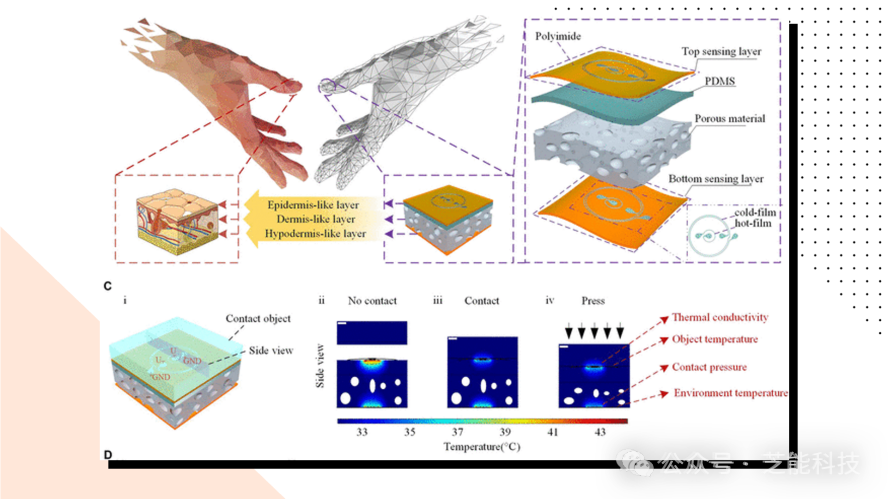
触觉传感器的传导原理可以参考人体皮肤的压力感应特性:
● 灵敏度:是触觉传感器的关键参数之一,与检测极限和施加压力之间的微小差异有关。提高灵敏度的策略包括微结构工程和传感材料接触的显著变化。
● 探测范围和线性度:触觉传感器的探测范围依赖于应用需求,需要在大范围的压力下实现高灵敏度。线性度表示信号相对于施加的刺激的比例,高线性度有利于信号处理和校准。
● 响应时间与迟滞:响应时间决定了传感器响应外部刺激获得稳定输出信号的时间,而迟滞则决定了施加和释放压力时输出信号的一致性。这两者在实时动态应用中至关重要。
● 空间分辨率与串扰:触觉传感器阵列的空间分辨率决定了是否能够识别或操纵复杂触觉信息。挑战之一是减少来自相邻单元的信号干扰,即串扰。
Part 2 技术路线:多种技术的演变
机器人触觉传感器的技术路线已经衍生出多种类型,其中电阻式、电容式、压电式、光学式、流体式等成为主流。这些传感器在原理上各有千秋,但都致力于将外部施加的力转化为电阻或电容的变化,实现对力和剪切力的测量。光学式传感器具有较高的空间分辨率和较宽的动态响应范围,而流体式方案如BioTac通过柔性橡胶皮和离子导电流体实现对法向力和剪切力的测量。
Part 3 发展趋势:多模式和新型传感器的涌现
近年来,学界和业界开始探索多模式和新型触觉传感器,以提升感知性能并降低生产难度。多模式触觉传感器融合多种传感技术,集成电气接口并优化制造流程,以实现多阵列单芯片。同时,新型传感器如量子隧道效应传感器、有机场效应晶体管传感器、结构声触觉传感器和纳米触觉传感器等不断涌现,为触觉传感技术的发展带来新的可能性。
触觉传感器主要应用于以下四个方面:
● 让假肢获得接近真实的触觉:触觉传感器通过模拟皮肤中的神经元传导信号,实现了假肢对触觉的模拟,创造出“电子皮肤”。
● 力传感器赋予工业机器人手腕触觉:可感知机器人和机台的所有力,为制造业引入工业机器人提供了重要的支持。
● 触觉传感器应用于仿生机器人:可在严苛的工作环境下进行操作,替代人类进行危险或高强度的工作,同时获取相应的感知数据。
● 柔性触觉传感器的崛起:近年来,柔性触觉传感技术的发展为穿戴设备和可穿戴技术提供了新的可能性,扩大了触觉传感器的应用范围,涉及人机交互系统、智能机器人、移动医疗等领域。
小结
触觉传感器技术的进步在机器人领域催生了更灵活、智能的机械手,为特定任务的执行提供了新的可能性。特斯拉的GEN2机器人展示了令人瞩目的灵敏动作,为触觉传感技术的未来发展提供了新的方向。随着技术的不断发展,触觉传感器有望成为更多智能系统的重要组成部分,为人机交互提供更为自然和智能的体验。
-
传感器:人形机器人感知核心(附报告全文)2024-08-27 2595
-
人形机器人传感器产业链最新分析:力、触觉、IMU、视觉传感器为主流!(全面)2025-10-11 72562
-
ST、汉威科技和纽迪瑞入局人形机器人,多家企业亮出关键传感器2025-04-03 7183
-
机器人竞技幕后:磁传感器芯片激活 “精准感知力”2025-08-26 572
-
智能机器人对于传感器的需求2015-01-20 6547
-
为什么人形机器人更讨人喜欢?2016-05-12 5111
-
机器人传感器2018-01-03 3635
-
机器人传感器应用2021-09-16 1724
-
柔性机器人和刚性机器人的区别2023-06-07 3752
-
柔性触觉传感器或将在人形机器人时代大放异彩2023-12-13 1797
-
人形机器人柔性触觉传感器的关键技术分析2024-01-02 6413
-
全面分析:人形机器人快速发展,哪些国产传感器将受益?(深度报告)2024-02-21 2195
-
柔性机器人与刚性机器人区别与联系2024-07-21 1960
-
人形机器人感知变化的未来2024-08-05 1789
-
汉威科技柔性触觉传感器:为人形机器人装上“中国触觉”2025-02-27 1390
全部0条评论

快来发表一下你的评论吧 !
