

基于双边介电弹性体致动器的肌肉启发软体机器人设计
描述
相较于依赖准确电机或机械设备进行精确多维控制的传统机器人,新型柔性机器人只能通过柔性致动器的材料变形以简单的驱动方法进行控制。然而,柔性材料的非线性变形很难预测,这使得柔性机器人难以处理复杂的操作要求。
受到人体肌肉群的启发,电科技大学的于军胜教授团队设计了一种具有双侧变形功能的柔性致动器,并在此基础上开发了一种具有可调致动组合的齿轮状3D柔性机器人,具备可调节的致动组合。随后,又受口腔轮匝肌启发,设计了一种类似嘴巴的柔性机器人,该机器人可以咬住并抓取其体重5.3倍的物体。这种单一致动器的双向功能和多个致动器之间的各种组合模式使柔性机器人展现出多样的功能和灵活性,为设计高度可控的三维柔性机器人提供了一种新的思路。目前,该工作以“Muscle-inspired soft robots based on bilateral dielectric elastomer actuators”发表在《microsystems & nanoengineering》。
图文导读:
单侧致动器由0.18 mm厚的PET基板、0.18 mm厚的加强框架以及双面碳润滑脂电极为活性层的预拉伸介电弹性体组成(图1)。双侧致动器通过背靠背粘合两个单侧致动器而形成。与单侧致动器相比,双侧致动器在稳定性和尺寸控制方面表现更佳。在循环测试中,双侧致动器表现出更好的稳定性,偏离角的标准偏差远低于单侧致动器。双侧致动器还可作为双边弯曲致动器,表现出增强的尺寸控制。通过双侧致动器的两种驱动模式,研究人员设计了3D齿轮形机器人,可实现高度可控的多向运动。机器人的性能与PET基材的刚度和弹性体的预拉伸率有关,通过调整这些参数,可以优化机器人的性能。
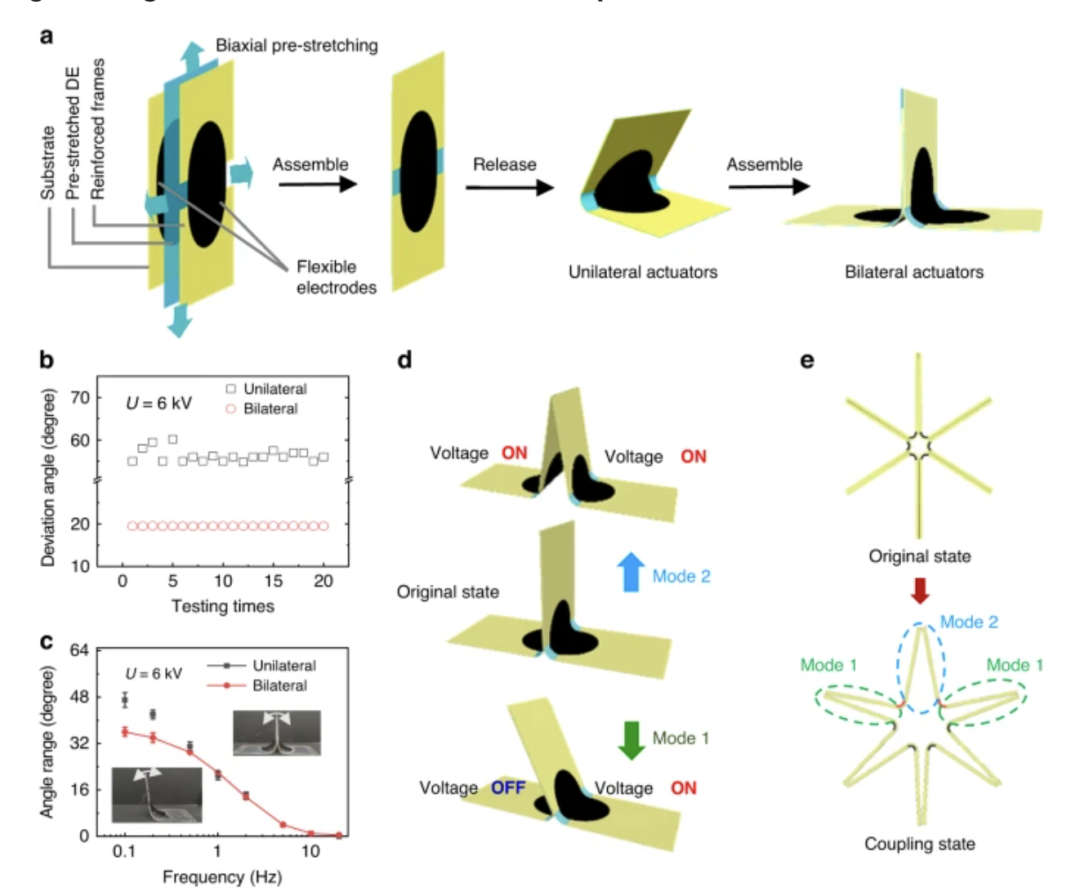
图1. 肌肉启发的双侧致动器的设计和制造
接下来研究团队研究了双边致动器在两种不同驱动模式下的变形性能(图2)。在第一个驱动模式中,左侧启动时向右弯曲,右侧启动时向左弯曲,达到18°和26°的偏差角分别在0.2秒和1秒的驱动时间内。这种交替高压驱动模式对应于驱动模式1,可以通过组合不同的电压值来获得任何所需的弯曲角度。在第二个驱动模式中,两侧同时驱动,导致致动器中间产生间隙,随着驱动时间的增加,间隙距离从10 mm增加到12 mm。循环性能测试显示,驱动模式1下的双边致动器偏差角在4500次驱动循环后略微增加,而驱动模式2下的间隙距离也有轻微增加。此外,双边致动器产生的驱动力在mN级别,随着电压的增加而增加。在两种驱动模式下,致动器的阻断力确保了其在相当长的循环中不会降低变形性能。这些结果为双边致动器的实际应用提供了重要的性能数据。
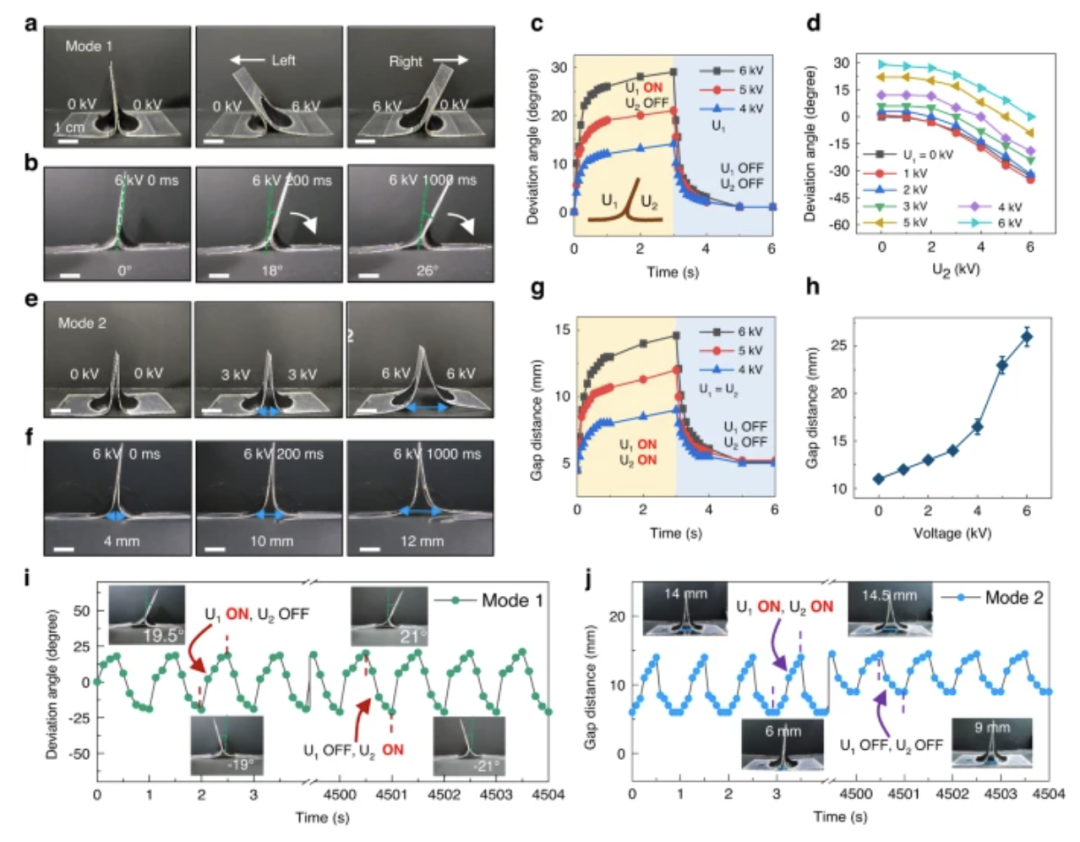
图2. 双侧致动器的性能介绍
基于双侧致动器在两种驱动模式下的变形性能,研究团队成功开发了一种3D齿轮形柔性机器人(图3),通过多个致动器的协调运动实现了高度可控的多向爬行和滚动。该柔性机器人展示了在不同频率下的爬行速度和步距的关系,以及在转向控制方面的灵活性。通过将多个致动器首尾相连形成闭环机器人,机器人表现出多向对称性,并在不同位置驱动致动器实现了向不同方向的快速移动。
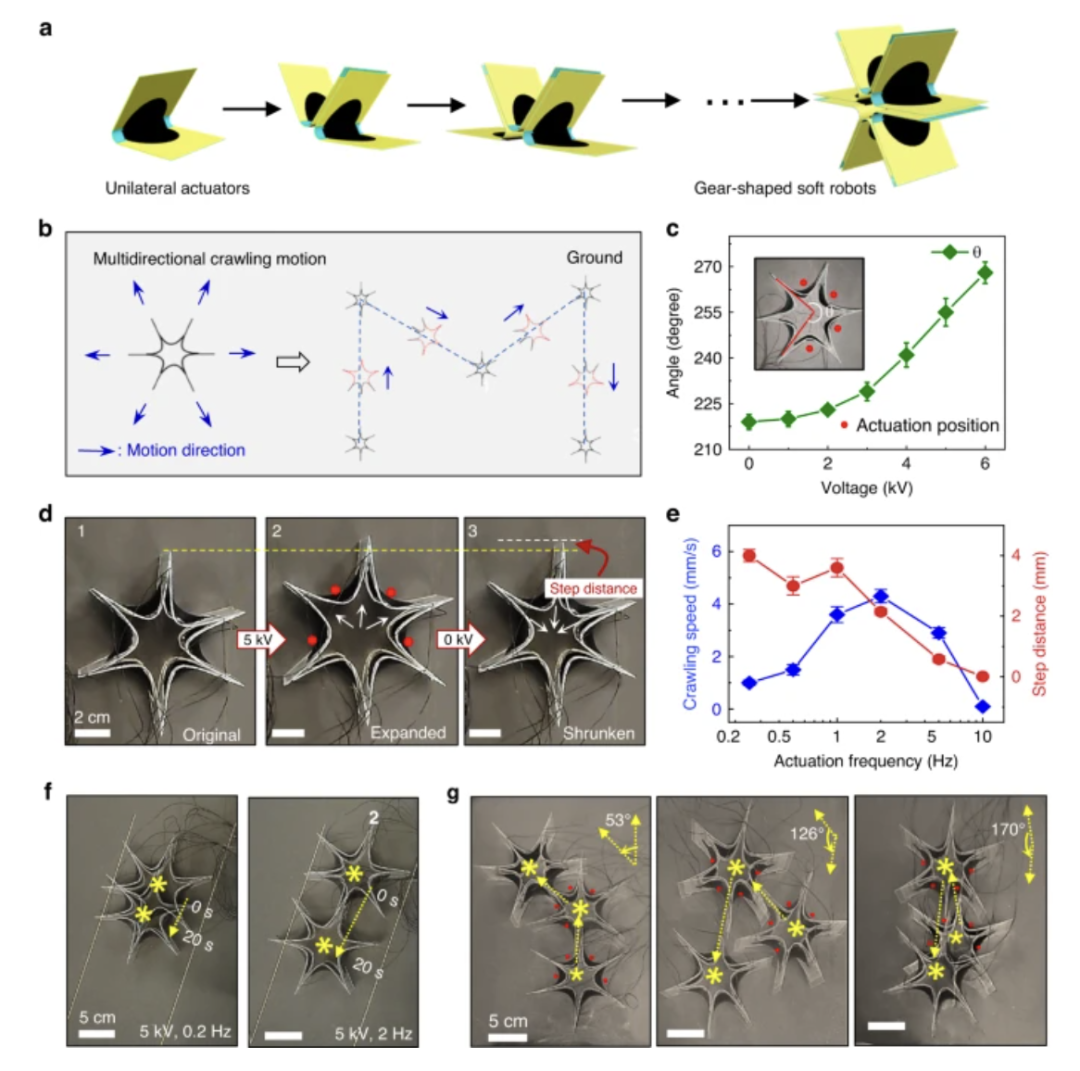
图3. 齿轮形3D柔性机器人及其爬行行为
在进一步的研究中,研究人员用齿轮形柔性机器人展示了一种新的操作方式,只用两只脚着地,像滚动的柔性机器人一样向前滚动。通过调整致动器的位置,可以改变机器人的重心,实现在地面甚至斜坡上的滚动行为。通过组装七个致动器,研究团队成功实现了这种滚动柔性机器人,并详细研究了不同致动器组合下机器人重心的分布。该机器人不仅可以实现前进滚动,还能够以相同的方式实现后退滚动,显著提高了运动的可控性。通过在斜坡上的滚动测试,研究团队验证了该机器人在不同场景下的稳定滚动运动,为其在实际应用中的灵活性提供了更多可能性。
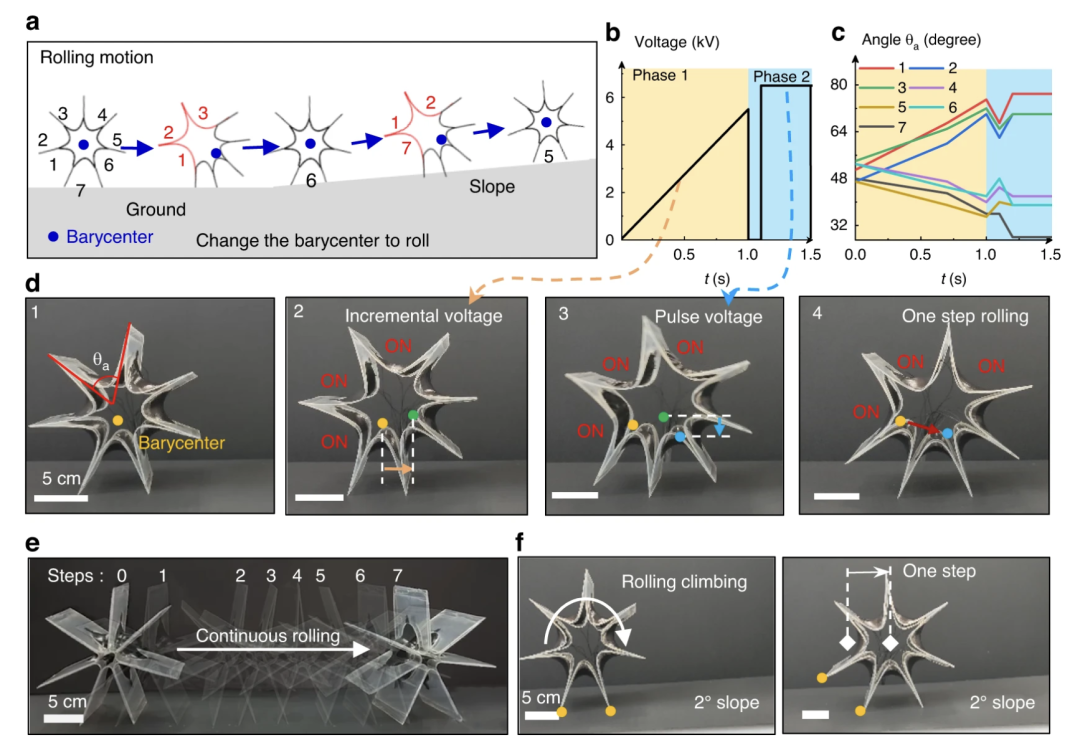
图4. 滚动柔性机器人
受到口腔内的口轮匝肌启发,研究团队通过连接多个执行机构形成的环形结构成功实现了类似人嘴的抓取功能,被称为“类嘴柔性机器人”。这种嘴状机器人可以通过调整致动器上的致动电压来调整其内部尺寸,实现有效的抓取性能。在抓取性能测试中,嘴状柔性机器人通过控制不同网格数的砂纸作为内壁,成功捡起不同重量的乒乓球。虽然这款机器人展示了多样化的运动形式和高度的可控性,但研究团队指出其仍需解决外部电力设备驱动的笨重和运动模式切换手动控制的局限性,提出在进一步研究中可以考虑增加电池和控制电路,以实现更广泛的应用。
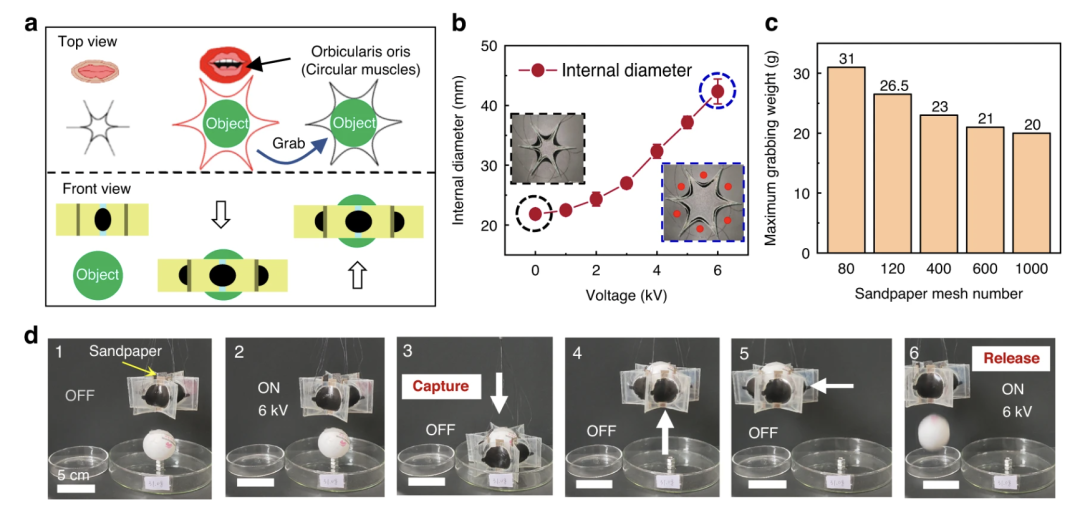
图5. 受口腔轮匝肌启发的柔性机器人
总结:
这项研究创新性的开发了一种受肌肉启发的双侧柔性致动器,为仿生机器人设计提供了新的思路。通过深入研究双侧致动器在两种驱动模式下的变形性能,实现了高度可控性。进一步,设计了一款集成双侧致动器的三维齿轮形柔性机器人,展现了出色的运动和物体操纵能力,包括多向爬行、双向滚动等。此外,通过模仿口腔轮匝肌,成功实现了柔性机器人抓取和运输物体的功能。整体而言,这项研究为高度可控的仿生三维柔性机器人的设计提供了重要的技术基础和实践经验,为未来机器人领域的发展带来了创新性的贡献。
文章来源:Bionic Science
审核编辑:汤梓红
-
ATA-7000系列高压放大器,赋能介电弹性体研究实验新突破!2025-09-06 968
-
安泰电子40kV高压放大器助力介电弹性体实验实现新突破2025-09-04 798
-
介电弹性体软机器人研究:高压放大器的应用实践2025-08-14 852
-
高压放大器驱动介电弹性体可以做哪些实验2025-06-20 767
-
高压放大器在电致动介电弹性体圆柱驱动器中的应用2025-03-18 919
-
安泰ATA-7000系列高压放大器在介电弹性体驱动实验中的应用2024-11-11 1091
-
安泰ATA-7030高压放大器在介电弹性体智能材料中的应用2024-09-13 1356
-
安泰功率放大器如何驱动介电弹性体做运动2024-08-25 1035
-
高压放大器在介电弹性体折纸术软体机器人中的应用2024-02-27 5489
-
功率放大器如何驱动介电弹性体做运动?2023-11-24 1274
-
功率放大器在驱动介电弹性体机器人的应用2023-02-24 1239
-
高压放大器基于介电弹性体最小能量结构设计应用2021-12-17 826
全部0条评论

快来发表一下你的评论吧 !
