

基于Crazyflie和TOF传感器的自旋停效果实现
描述
今天小编给大家带来的是新加坡的Maker Chathuranga Liyanage使用TOF传感器让Crazyflie实现高度自保持的项目。

设备列表
硬件:
Crazyflie2.0
Bitcraze Crazyradio PA
Z-ranger deck
软件:
AdaCore GNAT Community
无人机有多个传感器可以飞行,但是他们都无法识别出近距离的障碍物或与地面的实际距离。这就是无人机需要测距传感器的原因。它们提供到途中最近物体的准确距离读数。此外,这些对于地图绘制目的很有用,允许路径规划和自主导航。
几年来,我一直在使用Crazyflie进行我的大学项目,并使用库存固件。在发现使用 Ada 实现的 Certyflie 固件后,由于它的简单性,我开始对其进行测试。由于没有大量的文件,我很容易在短时间内熟悉固件,并实现自己的函数和库。在这里,我计划解释以下主题。
粗略了解 Certyflie 固件的主要功能。
集成ToF传感器以测量高度
实现自主起飞序列
使用ToF传感器实现高度保持功能。
介绍如何实现ToF传感器甲板以映射环境。
让我们开始为这些设置背景。
设置背景
这些对我来说是有用的,而不会给使用 Ada 开始编程 CF 带来太多麻烦。
操作系统 - Windows 8.1
GNAT 版本 - 2018 arm elf
固件 - Certyflie (ravenscar-cf-stable)
若要设置编译器路径,请打开命令提示符,导航到克隆存储库的根目录,然后键入以下命令。我们需要设置 GNAT bin 文件夹的路径。根据您的安装目录更改路径。
path C:GNAT2018in;%path%
要将固件上传到 CF,我们需要 DFU-util。简单地说,我们可以使用 CLI 安装程序将其安装在 Windows 上。安装后,您可以在 命令提示符下键入以检查安装。它应该返回已安装的版本。dfu-util -l
Certyflie 存储库的 Readme 部分提供了有关上传编译文件的明确说明。由于 Windows 没有 sudo 命令,因此请确保在最后一个命令中删除该部分。
dfu-util -d 0483:df11 -a 0 -s 0x08000000 -D obj/cflie.bin
添加 Z Ranger Deck
CF平台带有几个可拆卸的传感器拓展版,以扩展其功能。Z ranger 甲板有一个飞行时间传感器,它是一种距离测量传感器,可帮助无人机保持与地面的恒定高度。
Z ranger 配备 VL53L0X 传感器,最大感应距离为 2m。此传感器的库包含在 CertyflieAda_Drivers_Librarycomponentssrc ange_sensor 内的克隆存储库中。但是,此库的新版本在 https://github.com/AdaCore/Ada_Drivers_Library 中可用。在此实现中,我将现有库替换为新库。
要定义传感器对象并设置 I2C 端口, 请使用以下命令将库添加到 stm32-board.ads:
with VL53L0X; use VL53L0X;
并添加以下行。
Z_Ranger_Device : VL53L0X_Ranging_Sensor(I2C_EXT_Port'Access, Ravenscar_Time.Delays);
给CF通电后,它会初始化所有传感器和组件。此过程在 内部 过程中可用。为了将我们的传感器添加到这个初始化过程中,我们首先导入VL53L0X、STM32.board和STM32。I2C 库。然后我们在初始化过程中添加以下部分。
crazyflie_system.adbSystem_Init
Initialize_I2C_GPIO (STM32.I2C.I2C_Port (Z_Ranger_Device.Port.all)); Configure_I2C (STM32.I2C.I2C_Port (Z_Ranger_Device.Port.all)); Set_Device_Address (Z_Ranger_Device, 16#52#, Status); Data_Init (Z_Ranger_Device, Status); Static_Init (Z_Ranger_Device, New_Sample_Ready, Status); Perform_Ref_Calibration (Z_Ranger_Device, Status); Set_VCSEL_Pulse_Period_Pre_Range (Z_Ranger_Device, 18, Status); Set_VCSEL_Pulse_Period_Final_Range (Z_Ranger_Device, 14, Status); Start_Continuous (Z_Ranger_Device, 0 ,Status);
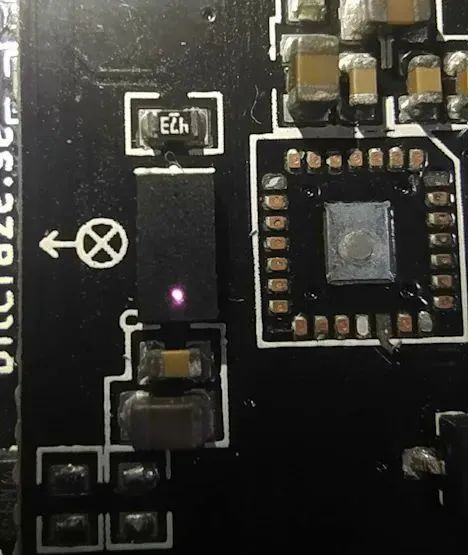
上传后,您可以打开CF的电源,并用手机摄像头检查ToF传感器,以检查其是否正常工作。如果传感器已成功初始化并开始工作,您会注意到紫灯亮起。
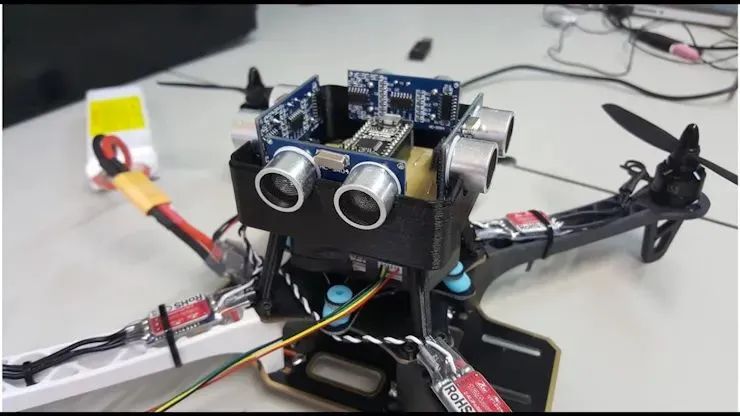
P.S. - 这里我们使用光流甲板,而不是Z ranger甲板。因此,如果您的 Z 游侠套牌看起来不同,请不要担心。pmw3901 传感器由于在飞行无人机时发生了一些严重的坠机事故而损坏。
添加到日志
CF 有一个 python 库来执行各种任务。使用原始固件,我们可以通过CF无线电模块使用笔记本电脑与无人机进行通信。检索数据日志是该库最重要的功能之一。它可以访问传感器读数、无人机状态、电池电量和许多其他参数。幸运的是,Certyflie 固件的数据日志数量有限,并且可以与 CF python 库一起使用。
在 examples 文件夹内打开。此代码在运行时打印实时滚动、俯仰和偏航值。
basiclogSync.py
lg_stab.add_variable('stabilizer.roll', 'float')
lg_stab.add_variable('stabilizer.pitch', 'float')
lg_stab.add_variable('stabilizer.yaw','float')
在第一行中,“stabilizer”是日志组,“roll”是参数,“float”是数据类型,数据类型与CF记录该特定参数的数据类型相同。在 中,您可以找到 所有日志组都已定义的过程。例如,下面显示了如何初始化偏航日志。
stabilizer.adb,Stabilizer_Init
Log.Add_Log_Variable (Group => "stabilizer",
Name => "yaw",
Log_Type => Log.LOG_FLOAT,
Variable => Euler_Yaw_Actual'Address,
Success => Dummy)
当您运行 python 代码时,它将连接到 CF 并开始打印值。更改无人机的方向,看看值是如何变化的。
现在,让我们将ToF传感器测量值添加到日志中。这样,我们就有机会看到当我们改变无人机的高度时,该值是如何变化的。
首先,我们需要在传感器可用时从传感器获取测量值。初始化后,系统 在 .这将更新无人机的状态参数。我们在此功能中添加了高度测量部分。接收距离以毫米为单位。在这里,我们将其转换为 m。
Stabilizer_Update_Attitudestabilizer.adb
if Range_Value_Available (Z_Ranger_Device) then Z_Height := 0.001 * Float (Read_Range_Millimeters (Z_Ranger_Device)); end if;
我添加了一个名为“Range_Measurements”的单独状态变量组来保留此变量。然后,将以下日志添加到 函数中。
Stabilizer_Init
Log.Add_Log_Variable (Group => "range",
Name => "z_range",
Log_Type => Log.LOG_FLOAT,
Variable => Z_Height'Address,
Success => Dummy);
要通过 PC 查看这些值,可以在 python 脚本中添加以下行。
lg_stab.add_variable('stabilizer.yaw','float')
实现高度保持功能
Certyflie 固件已具有高度保持功能。它使用预定义的推力作为基值。您可以在 中找到此值。我假设这个值几乎等于 CF 的重量,没有额外的传感器甲板。
commander.ads
ALT_HOLD_THRUST_F : constant := 32_767.0;
由于现在我们有了测量分辨率为 1mm 的离地距离的方法,因此我们可以使用 z 测量实现单独的高度保持功能。为此,我们需要找到一种方法来使用我们自己的函数设置推力值。
为稳定器功能提供推力、滚转、俯仰和偏航值,以运行电机使无人机飞行。如果仔细观察,我们可以确定无人机是通过两种方法激活的。
Stabilizer_Control_Loop
从飞行员命令
当检测到自由落体时
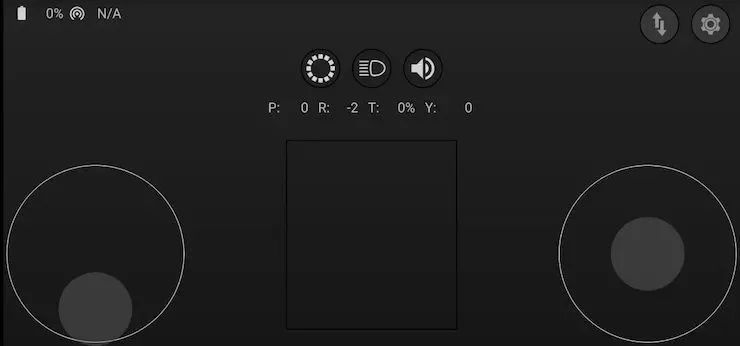
飞行员命令是使用 CrazyFlie 移动应用程序发送的。您可以使用移动应用程序中的虚拟操纵杆连接蓝牙并驾驶无人机。这些命令被无人机捕获为CRTP数据包,并对消息进行解码以获取相关参数。
使用IMU测量的Z加速度值检测自由落体。一旦检测到自由落体,无人机就会开始产生推力以从坠毁中恢复过来,并运行一个循环以减少推力以降低高度。起始推力和递减值可以在 free_fall.ads 中找到。您可以减少递减值以获得平稳着陆。
MAX_RECOVERY_THRUST : constant T_Uint16 := 48_000; RECOVERY_THRUST_DECREMENT : constant T_Uint16 := 100;
通过模仿这些函数中的任何一个,我们可以传递推力值来制作我们自己的高度保持函数。但我更喜欢在我的实现中模仿试点命令。
首先,我注释掉了 Commander_Get_RPY、FF_Get_Recovery_Commands、Commander_Get_Thrust 和 FF_Get_Recovery_Thrust 函数调用。然后,我在指令器文件中实现了一个名为“Autonomous_Sequence”的单独函数,该函数打开电机并运行 PID 算法以将高度保持在所需水平。添加以下部分,以确保无人机在运行此功能之前处于水平位置。
Stabilizer_Control_Loop
if abs (Euler_Pitch_Actual) < 2.0 and abs (Euler_Roll_Desired) < 2.0 then
Activate_Autopilot := True;
end if;
PID 变量在 commander.ads 中定义。
如果您曾经调整过无人机的 PID,您可能知道这是一个非常麻烦的过程。没有精确的水平位置控制器会使这变得更加困难,因为无人机开始横向漂移。为了避免这种情况,我从左右两侧在无人机上系了两根绳子。这允许无人机在有限的区域内移动,同时我们调整 PID 值。
以下是高度保持功能的初始测试。该函数运行 8 秒。可以通过增加循环计数来增加此时间。所需高度设置为0.1米。
在调整PID时,我决定升级电机以获得更高的有效载荷能力,以连接更多的传感器并包括更大的电池。CF电机驱动器的N沟道MOSFET的最大额定电流为6A,为我们提供了更大的空间来增加电机尺寸。如封面图所示,现有的 0716 空心杯电机被 0720 电机取代。
以下视频显示了使用新电机和进一步调谐的 PID 的高度保持功能。在本实验中,所需的高度为0.8m。(Kp - 2000,Kd - 0,Ki - 500)。绳子被绑在两把椅子上,以获得更高的位置。
VL35LOX和VL35L1X
VL53L1X的最大感应距离为4m,而我们在这个项目中使用的VL53L0X的最大范围为2m。如上图所示,VL53L1X的镜头比其他传感器大。
Z Ranger deck V2 配备了这款新传感器。在浏览了两个数据表后,我注意到VL53L1X具有相同的默认 I2C 地址 (0x29),这也是VL53L0X的地址。此外,大多数重要寄存器在两个传感器中具有相同的地址。因此,Ada 中的 VL53L0X 库可以与VL53L1X一起使用来运行基本功能,这些功能足以满足我们的需求。
使用多个TOF传感器
很明显,我们需要在无人机上安装更多的传感器来覆盖周围环境。但问题是我们如何与具有相同 I2C 地址的多个传感器进行通信。
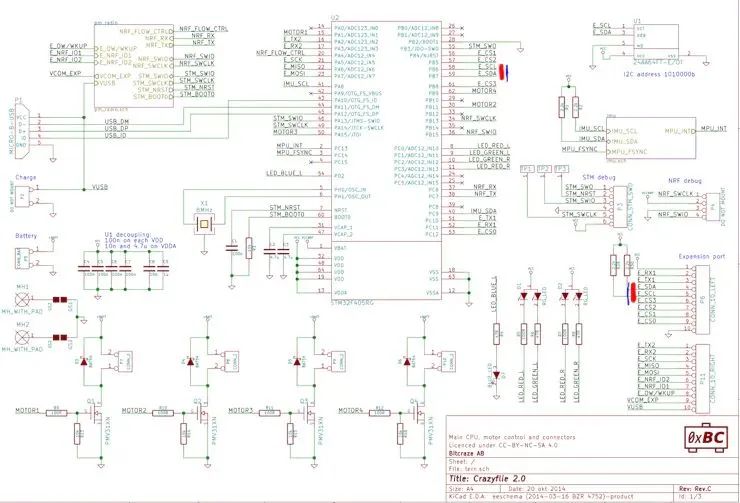
CF 上的 STM32 芯片主要有 2 个 I2C 端口。但一个端口仅用于内部传感器,例如 IMU。其他端口连接到扩展引脚,以便与传感器卡座通信。因此,我们需要找到一种使用这个 I2C 端口与多个 ToF 传感器进行通信的方法。
两种ToF传感器型号都能够更改其I2C地址。当我们将新地址写入传感器时,它存储在易失性存储器中。因此,我们每次打开设备并写入 I2C 地址时,都需要一个接一个地连接传感器。为了避免这个过程,ToF传感器附带了一个额外的引脚,称为XSHUT。
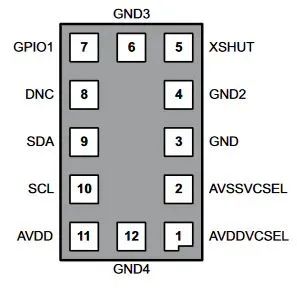
要打开传感器,我们需要拉起这个引脚。在Z ranger卡座中,该引脚通过电阻器永久连接到Vcc。解决方案是编写一个程序,使除 z ranger 之外的所有其他传感器的 XSHUT 引脚保持低电平,写入不同的 I2C 地址,将一个 XSHUT 引脚设置为高电平,写入不同的 I2C 地址,依此类推。这看起来是一个很好的方法,直到您有足够的GPIO引脚来连接所有ToF传感器。
为了克服GPIO引脚的不足,具有5个ToF传感器的CF Multiranger卡座配备了一个8位GPIO扩展IC,PCA9534 。该芯片通过不同的 I2C 地址与无人机通信。当我们将值写入其注册表时,它会根据给定的值将其 8 个 GPIO 引脚设置为高低。这样,我们就有机会仅通过 I2C 端口控制所有 ToF 传感器。因此,可以毫无困难地使用上述XSHUT引脚的相同过程。

da 库附带了多个 IO 扩展器库。但不幸的是,它没有配置芯片PCA9534库。目前,我正在为这个芯片实现一个库。beta 库位于附加存储库的 Ada 库文件夹中,但它需要更多的工作来实现所有可用的功能。同样,我计划在实现取得进展时更新存储库。
实现此结果后,我们可以使用所有距离测量值实现避障功能。
审核编辑:刘清
-
本人想做个果实选择装置,具体为对果实的颜色进行判断,但现在对颜色传感器有很多疑惑?2018-04-02 4369
-
iOS如何抽奖轮盘效果实现思路2020-04-28 2075
-
走进飞行时间传感技术揭秘TOF传感器工作原理及应用领域2020-11-14 3763
-
组装设计一个CrazyFlie避障传感器甲板2022-07-08 2296
-
RT-Thread VL53L0X TOF传感器驱动设计资料实现2022-09-15 2549
-
Tof传感器是如何进行校准的?2023-02-01 1291
-
ToF传感器将取代IR传感器,并应用于脸部识别2018-10-31 5104
-
TDK的MEMS超声波ToF传感器解决方案与光学ToF传感器相比具有很多优势2020-01-08 8215
-
ToF传感器的市场需求迎来爆发2020-11-26 4574
-
ToF传感器正在成为手机上的标配2020-12-04 2574
-
CrazyFlie 避障传感器飞行器2022-06-15 1866
-
ToF传感器究竟有多神奇?2023-05-18 9357
-
具有光流和ToF传感器的自主Crazyflie2023-06-27 1153
-
ToF传感器的原理及优缺点分析2023-08-22 5965
-
tof原理介绍 ToF传感器的优缺点2023-08-23 9550
全部0条评论

快来发表一下你的评论吧 !
