

百度Apollo City Driving Max荣获「年度智驾系统」
描述
近日,第八届“寻找有情感的出行伴侣”年度智能座驾评选颁奖典礼圆满举办,百度纯视觉高阶智驾产品Apollo City Driving Max荣获「年度智驾系统」奖项,“年度智能座驾评选”由智驾网主办,评选标准对标中汽研等专业机构标准,经过多年细化,更强调消费者用车的真实场景与体验,是业内最为专业、评选范围最为广泛、影响力最大的智能汽车车型评选活动。
根据L2+智驾功能逐渐成为新上市车型核心配置、高速NOA升级为城市NOA、更高效且成本更低的视觉方案迅速量产落地等行业变化,本届年度智能座驾评选进一步细化、优化测试场景,对入围车型进行城市真实道路评测、专业场地评测、以及专业设备评测,加大在城市LCC、高速NOA、城市NOA、自动泊车、记忆泊车等维度进行真实场景的评测。
此次百度Apollo City Driving Max获得「年度智驾系统」奖项,不仅彰显了行业对百度Apollo在智驾领域技术实力的高度认可,也标志着智能驾驶技术发展新标杆的诞生。
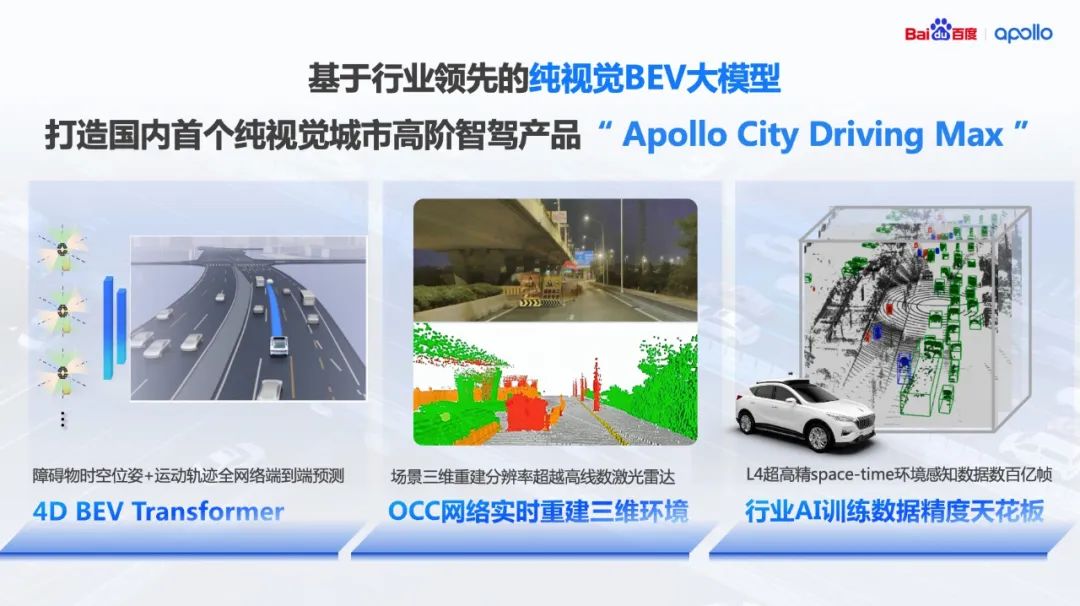
2023年,百度Apollo推出国内首个可量产的纯视觉高阶智驾产品Apollo City Driving Max,产品一经推出,迅速引发行业关注。在行业还处于“硬件狂堆料”的时代,百度Apollo创新性地使用“BEV+OCC+Transformer”纯视觉方案,打造覆盖泊车、高速、城市全域场景的高阶智驾产品,成功实现“去激光雷达”。即便在复杂城市道路场景,也能为用户带来与“有激光雷达”方案同样好的产品体验,且BOM成本更低,让整车更有价格竞争力。
领跑整个行业背后是百度Apollo多年的技术投入与积累。智驾行业发展初期,使用激光雷达可以降低算法研发难度,是行业普遍选择的方案。但实际上,在硬件局限条件下,激光雷达智驾方案算法上限低,后期迭代速度慢,并会很快到达天花板。相较之下,纯视觉智驾方案的算法上限更高、后期演进速度更快、且用户体验更好,但该方案前期启动速度缓慢,想要实现技术突破非常难。
百度Apollo最初便选择了一条更艰难的研发之路,2019年推出纯视觉方案Apollo Lite,并在该领域持续深耕。近一年,随着视觉大模型取得了巨大技术突破,百度Apollo在Apollo Lite框架基础上,用4D BEV Transformer全新升级第二代纯视觉感知系统,能够“快、准、稳”地预测道路参与者的时空位姿轨迹,同时,配合业内最前沿的占用网络OCC技术,对静态环境做端到端实时重建,可以获取比激光雷达点云分辨率更高的三维结构信息。
此外,百度Apollo还拥有高质量的Robotaxi原始数据积累,为纯视觉智驾方案打下“冷启动”数据基础。超过170亿参数的视觉大模型、日均产能百万帧的自动化标注产线、上亿帧的BEV+OCC精标训练数据,也加速了纯视觉方案的打造与后续优化。
基于此,2023年百度Apollo推出国内首个纯视觉BEV+Transformer动态障碍物感知技术、国内首个OCC占用网络技术,国内首个可量产的纯视觉城市高阶智驾产品,目前均已在极越01实现量产。在百度Apollo技术赋能下,极越01能够实现对障碍物更加精细的刻画,3D精度可以做到厘米级,比肩甚至超过激光雷达精度。
随着AI技术与大模型的快速演进与深度应用,百度Apollo将在高阶智能驾驶领域持续深耕,进一步降低城区高阶智能驾驶功能的上车成本,为更多用户带来更安全、更易用的智驾体验。
审核编辑:刘清
-
3天造出自动驾驶汽车的百度Apollo,背后竟有50多个后台2017-07-07 6522
-
宸曜成为百度Apollo 2.0自驾技术指定运算系统2018-02-13 2357
-
陆奇与百度apollo,百度下一站该往哪走?2018-05-24 4523
-
百度Apollo高精定位方案分析2018-10-02 19816
-
百度自主研发无人驾驶平台Apollo2020-09-09 3719
-
百度最新版本Apollo6.0发布,百度自动驾驶技术的更迭2020-09-16 6700
-
百度Apollo商业化之路任重道远2020-12-09 1049
-
百度自动驾驶车辆规模扩充 新增Apollo Moon 极狐版2022-05-23 2947
-
2022百度世界大会-百度正式发布第六代无人车Apollo RT62022-07-21 750
-
百度Apollo汽车智能化发布会 开放是硬道理 智能驾驶的整零协同路2023-04-17 4331
-
百度Apollo开放四大关键能力 发布《百度智能驾驶开放白皮书》2023-04-25 2528
-
智驾专家已就位!百度Apollo Highway Driving Pro将在新岚图Free首发量产2023-07-28 1390
-
百度Apollo与航盛携手,基于大模型打造新一代舱驾融合产品2023-10-21 1273
-
斩获「年度舱驾一体方案量产领军供应商」金球奖!百度Apollo领跑智能汽车时代2023-12-21 1295
-
百度发布全球首个L4级自动驾驶大模型Apollo ADFM2024-05-15 2196
全部0条评论

快来发表一下你的评论吧 !
