

工业机器人维护保养全攻略
机器人
描述
工业机器人在恶劣条件下运行,即使设计时进行完善的设计规范,维护率可以降低,但是,仍必须定期进行常规检查和预防性维护。
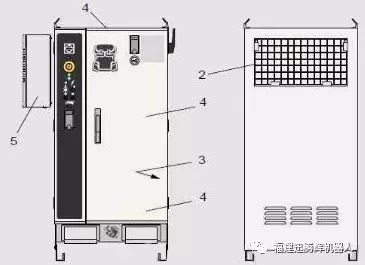
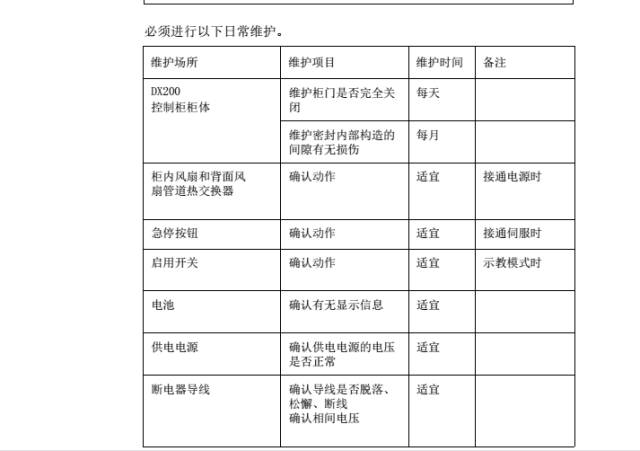
1 系统控制柜
维护频率如下:
① 一般维护,1次/天;
② 清洗/更换滤布,1次/500H;
③ 测量系统电池的更换,2次/7000H;
④ 计算机风扇单元的更换、伺服风扇单元的更换,1次/50000H;
⑤ 检查冷却器,1次/M
1、时间间隔主要取决于环境条件;
2、视机器人运行时数和温度而定;
3、适当确定机器人的运行顺畅与否。
(一)检查控制器散热
确保以下影响散热的因素无一出现:
控制器覆盖了塑料或其它材料;
控制器后面和侧面没有留出足够间隔(>120mm);
控制器的位置靠近热源;
控制器顶部放有杂物;
控制器过脏;
一台或多台冷却风扇不工作;
风扇进口或出口堵塞;
空气滤布过脏。
注意:控制器内不执行作业时,其前门必须保持关闭
(二)示教器清洁
应从实际需要出发按适当的频度清洁示教器;
尽管面板漆膜能耐受大部分溶剂的腐蚀,但仍应避免接触丙酮等强溶剂;
若有条件,示教器不适用时应拆下并放置在干净的场所。
(三)清洗控制器内部
应根据环境条件按适当间隔清洁控制器内部,如每年一次;
须特别注意冷却风扇和进风口/出风口清洁。清洁时使用除尘刷,并用吸尘器吸去刷下的灰尘。请勿用吸尘器直接清洁各部件,否则会导致静电放电,进而损坏部件。
注意:清洁控制器内部前,一定要切断!
(四)清洗/更换滤布
驱动系统冷却单元滤布的位置
1、找到控制柜北部的滤布;
2、提起并去除滤布架;
3、取下滤布架上的旧滤布;
4、将新滤布插入滤布架。
5、将装有新滤布的滤布架滑入就位。
备注:除更换滤布外,也可选择清洗滤布。详细如下:
在加有清洁剂的30-40℃水中,清洗滤布3-4次。不得拧干滤布,可放置在平坦表面晾 干。还可以用洁净的压缩空气将滤布吹干净。
(五)更换电池
电池
测量系统电池为一次性电池(非充电电池);
电池更换时,消息日志会出现一条信息。该信息出现后电池电量可维持约1800小时。(建议在上述信息出现时更换电池)
电池仅在控制柜“断电”的情况下工作。电池的使用寿命约7000小时。
如果控制柜除控制机器人外还控制CBS单元,或在使用8轴机器人的情况下,电池的使用寿命为上文所述的一般(使用2各SMU单元)。
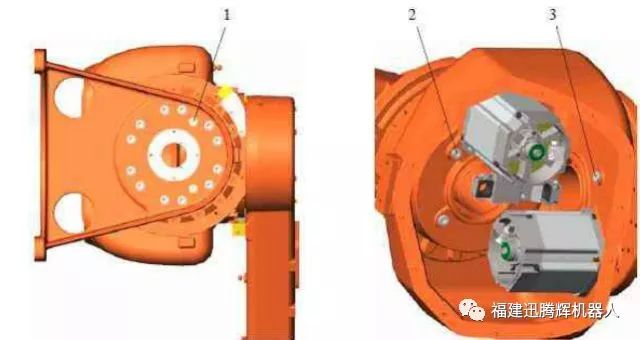
(六)检查冷却器
冷却回路采用免维护密闭系统设计,需按要求定期检查和清洁外部空气回路的各个部件;
环境湿度较大时,需检查排水口是否定期排水。
操作程序:
1、拆下冷却器外壳的百叶窗,断开显示器接头;
2、从百叶窗取下滤布(若有),用吸尘器清洁滤布,或视需要更换‘
3、拧下4各螺钉,卸下外部回路风扇(1);
4、卸下风扇(2);
5、拔下风扇接头(3);
6、拧下4各螺钉,取下盖板(4);
7、将显示器电缆向后推,穿过电缆接头;
8、拆下冷却器外壳的盖板;
9、拆下盖板与外壳间的接地电缆;
10、用吸尘器或压缩空气清理百叶窗、盖板、风扇、热交换器盘管(5)和压缩机室。可使用去油剂等不易燃洗涤剂去除顽固油污。
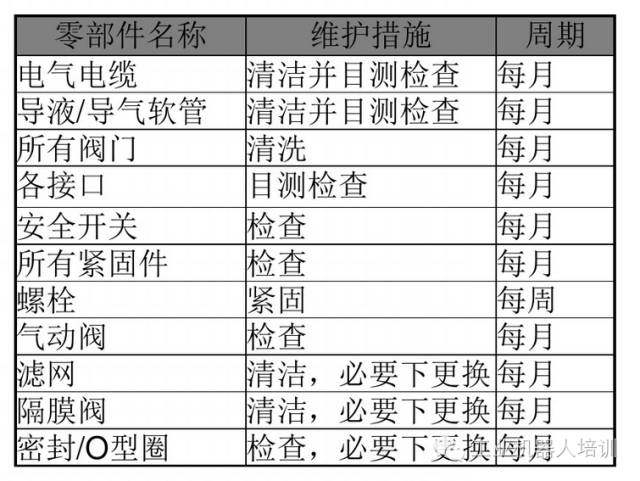
2 机器人本体维护保养
① 一般维护,1次/1天;
② 轴制动测试,1次/1天;
③ 润滑3周副齿轮和齿轮,1次/1000H;
④ 润滑中空手腕,1次/500H;
⑤ 各齿轮箱内的润滑油,第一次1年更换,以后每5年更换一次。
1、时间间隔主要取决于环境条件;
2、视机器人运行时数和温度而定;
3、适当确定机器人的运行顺畅与否。
(一)一般维护
1、清洗机械手
应定期清洗机械手底座和手臂。
使用溶剂时需谨慎操作。
应避免使用丙酮等强溶剂。
可使用高压清洗设备,但应避免直接向机械手喷射。
如果机械手有油脂膜等保护,按要求去除。(应避免使用塑料保护)
为防止产生静电,必须使用浸湿或潮湿的抹布擦拭非导电表面,如喷涂设备、软管等。请勿使用干布。
2、中空手腕
如有必要,中空手腕视需要经常清洗,以避免灰尘和颗粒物堆积。
用不起毛布料进行清洁。
手腕清洗后,可在手腕表面添加少量凡士林或类似物质,以后清洗时将更加方便。
3、定期检查
视需要经常检查下列要点:
检查是否漏油,如发现严重漏油,应向维修人员求助;
检查齿轮游隙是否过大,如发现游隙过大,应向维修人员求助;
检查控制柜、吹扫单元、工艺柜和机械手间的电缆是否受损。
4、检查基础固定螺钉
将机械手固定于基础上的紧固螺钉和固定夹必须保持清洁,不可接触水、酸碱溶液等腐蚀性液体。这样可避免紧固件服饰。
如果镀锌层或涂料等防腐蚀保护层受损,需清洁相关零件并涂以防腐蚀涂料。
(二)轴制动测试
在操作过程中,每个轴电机制动器都会正常磨损。为确定制动器是否正常工作,此时必须进行测试。
测试方法:按照以下所述检查每个轴马达的制动器
1、运行机械手轴至相应位置,该位置机械手臂总重及所有负载量达到最大值(最大静态负载);
2、马达断电;
3、检查所有轴是否维持在原为。
如马达断电时机械手仍没有改变位置,则制动力矩足够。
还可手动移动机械手,检查是否还需要进一步保护措施。
当移动机器人紧急停止时,制动器会帮助停止,因此可能会产生磨损。所以,在机器使用寿命期间需要反复测试,以检验机器是否维持着原来的能力。
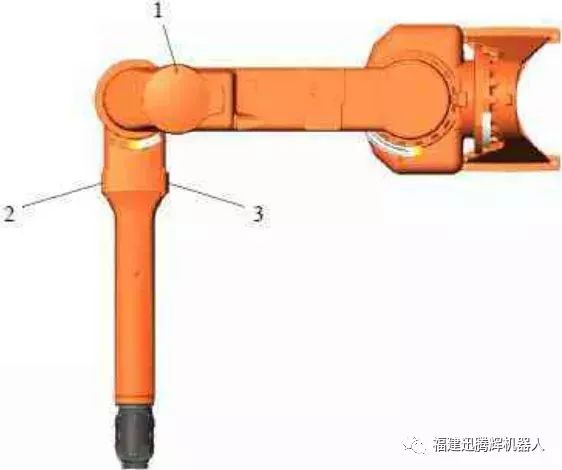
(三)润滑3轴副齿轮和齿轮
工具和用品:
K-NATE(或Omega 77)润滑脂;
润滑脂泵。
步骤:
警告!开始执行下列程序前,确保机器人及相关系统关闭并处于锁定状态。
1、将制定类型润滑脂注入润滑脂泵;
2、每个油嘴中挤入少许(1克)润滑脂,诸葛润滑副齿轮滑脂嘴 ① 和4各齿轮滑脂嘴 ② 。
小心!不要注入太多,一面损坏密封。
(四)润滑中空手腕
中空手腕10个润滑点
工具和用品:
K-NATE(或Omega 77)润滑脂;
润滑脂泵。
小心!每个注脂嘴只需几滴润滑剂(1克)。不要注入过量润滑剂,否则会损坏腕部密封和内部套筒。
在将轴④、⑤、⑥分别转动90°、180°、270°后,再润滑。
(五)检查齿轮箱内油位
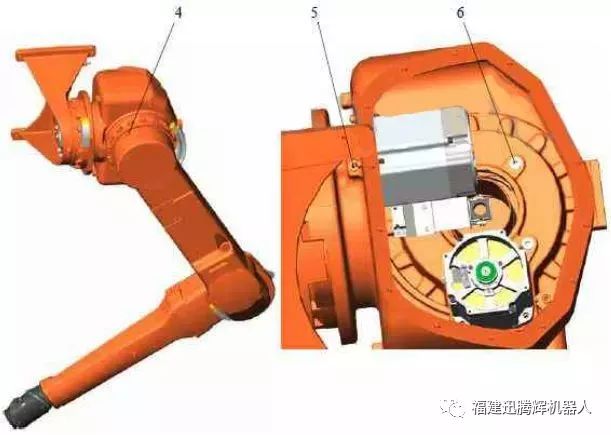
1轴 和 2轴 齿轮箱上的加油塞位置
1轴:打开加油塞① 和加油塞③ 或⑤;
2轴:打开加油塞④ 和加油塞② 或⑥。
3轴、4轴、5轴、6轴齿轮箱上的加油塞位置
3轴:打开加油塞①;
4、5、6轴:打开加油塞② 或③。
(3轴臂必须水平放置。)
IRB 5500
第1、2轴的齿轮箱装运前加注:Shell Tivela S150。
其它轴的齿轮箱装运前家住了:Shell Omela 320润滑油
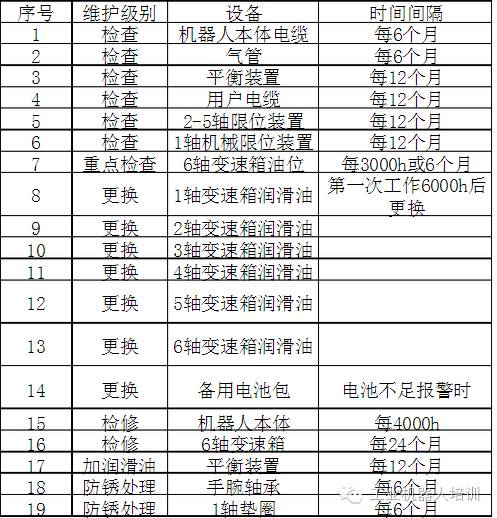
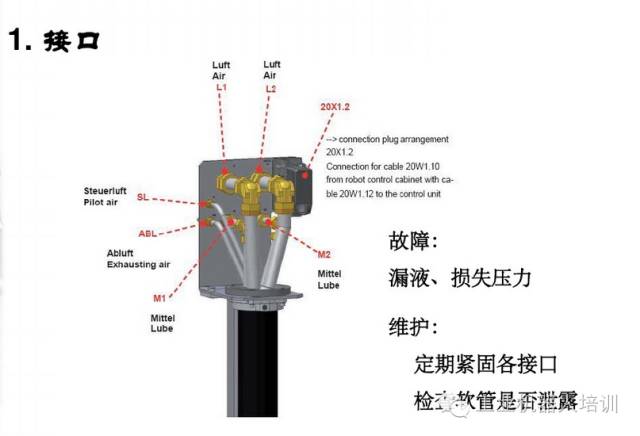
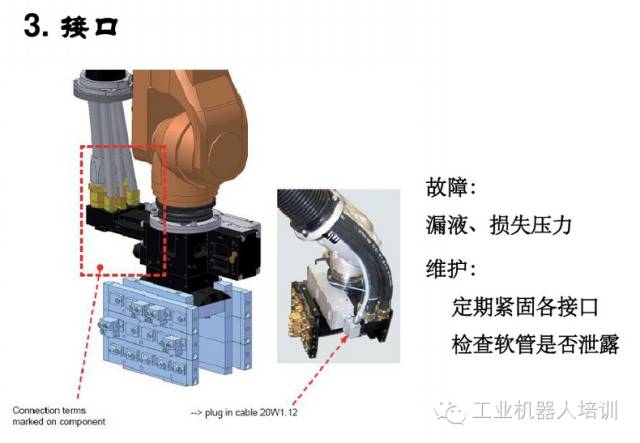
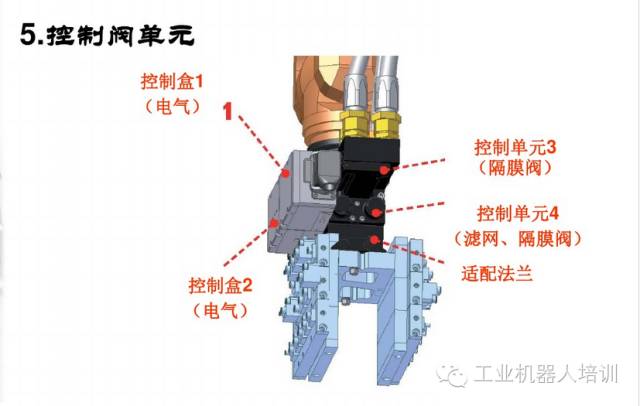
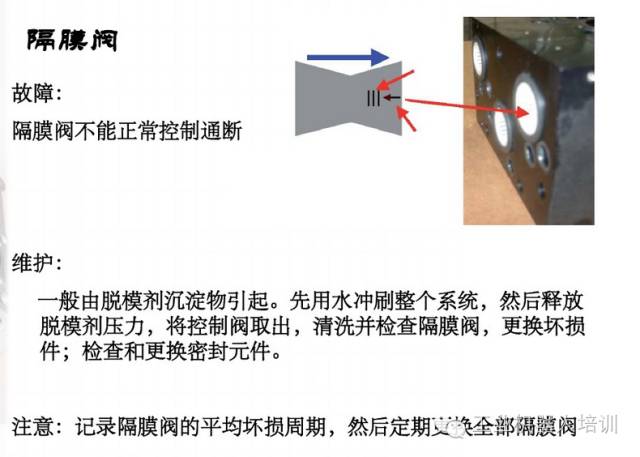
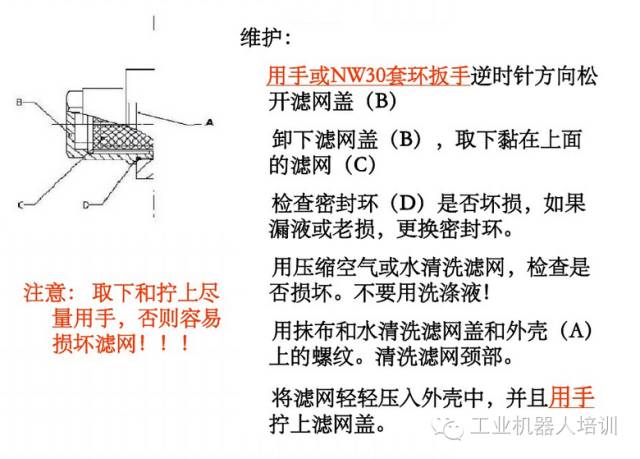
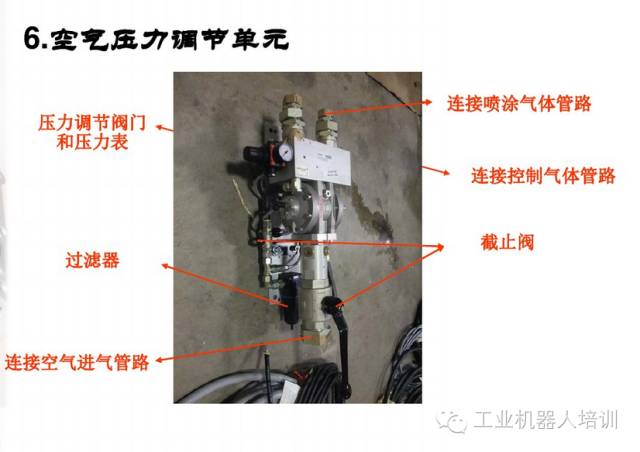
3 工业机器人喷涂系统的维护保养




4 ABB机器人维护指南
前言
本手册包含了关于机械和电气上的维护及维修说明
在维护及维修机器人前,请阅读本手册
本手册适用于:
* 用户自己的维修人员
* 其它维修人员
阅读者需要:
* 是有一定技能的维修人员
* 有机械维修方面的知识
* 有电气维修方面的知识
第一章:安全、维护
1、有危险的安全
2、钳子的安全

3、工具/工作件的安全
见用户安全指南
4、气动/液压系统的安全
见用户安全指南
5、操作中的一些危险
见用户安全指南
6、安装及维护过程中的危险
见用户安全指南
7、电气元件的危险
见用户安全指南
8、刹车检查
正常运行前,需检查电机刹车
每个轴的电机刹车检查方法如下:
a、运行每个机械手的轴到它负载最大的位置
b、将机器人控制器上的电机模式选择开关打到电机关(MOTORS OFF)的位置
c、检查轴是否在其原来的位置
如果电机关掉后,机械手仍保持其位置,说明刹车良好。
9、失去减速运行(250mm/s)功能的危险

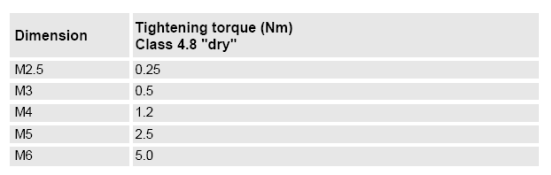
第二章、相关信息
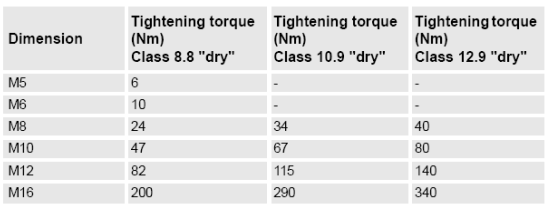
以下的表格描述不同螺栓的扭矩值,平口及十字型螺栓
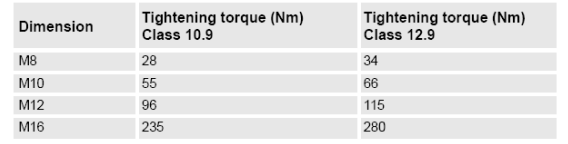
六角套筒型螺栓
六角套筒型并带润滑的螺栓
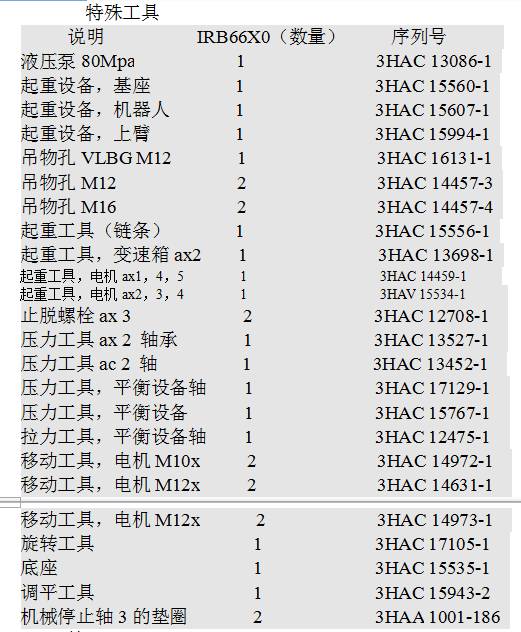
10、标准工具 IRB6600/6650/7600
以下包含了一些标准工具

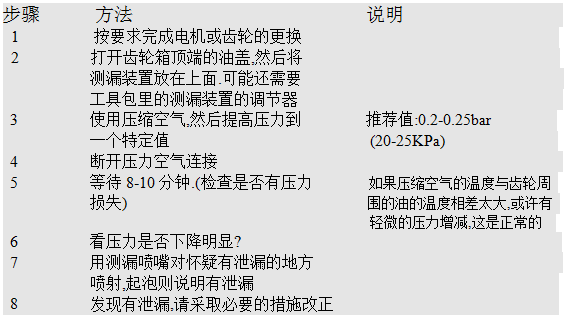
11、检漏测试
当更换或修理电机或变速箱后,必须对变速箱内的油作个检查,这就是检漏测试
所需设备为专门的检查装置,序列号为3HAC 0207-1
方法及步骤
12、起重设备
不同的修理及维护工作需要不同的起重设备,这在维修指南中有指明,但怎样使用在维修指南中没有说明,所以一定要保留这些工具的使用说明书
第三章、维护信息系统(SIS)
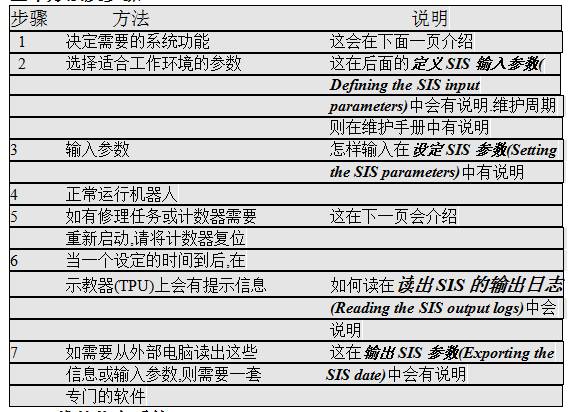
1、使用SIS系统
这是一个简短的维护信息系统(SIS)的使用说明,详细的资料可在以下几处找到:
* 维护信息系统,SIS
* 定义SIS输入参数
* 设置SIS参数
* SIS参数的交换
* 读出SIS的输出日志
基本方法及步骤
2、维护信息系统(SIS)
维护信息系统(SIS)是一个在机器人控制器里的软件功能,其简
单化了机器人系统的维护.其管理工作时间及模式,并在预定的
维护时间到后为提醒操作人员
5 机器人维护维修学习资料



审核编辑:黄飞
-
智能小车的DIY全攻略2017-10-13 1449
-
FPGA开发全攻略2017-09-27 9425
-
LED调光技术全攻略2017-02-08 1244
-
GPS设计全攻略2012-08-06 10430
-
MCU解密全攻略2011-07-11 2757
-
交互式电子白板保养全攻略2010-02-09 581
-
投影灯泡维护全攻略2010-02-08 930
-
GPS 设计全攻略2008-09-25 14752
全部0条评论

快来发表一下你的评论吧 !
