

机械手的分寸感,靠这款传感器来拿捏
描述
机械臂是一种能够模拟人类手臂运动的机械装置,在工业领域应用非常广泛,其包含的主要技术是驱动和控制;其末端定位精度是评价其性能的重要指标之一,而测量标定的方法则是提高机械臂末端定位精度的关键。
传感器技术是机械臂末端定位精度的重要保障。工程师们常常使用高精度传感器来实时监测机械臂末端的位置和姿态,从而提高机械臂的末端定位精度。
本期小明就来根大家分享激光位移传感器在机械手定位中的应用~
检测场景
在锂电自动化产线上,机械手吸盘精准吸取电池移动至下一工序;这里机械手上需要安装传感器以获取机械手Z轴高度数据,检测机械手距离电池表面的高度。
具体需求:机械手定位
精度要求:机械手吸盘到电池组表面确保能正常吸起电池
现场情况:
1、机械手吸盘与电池组之间不能有太大缝隙,也不能过于贴合
2、传感器安装在机械手臂上跟随机械手来回运动
3、传感器距离电池组表面高度在390mm左右
解决方案
选用激光位移传感器MLD21-500N-485,可以精准获取机械臂的Z轴高度数据,有效提高机械臂的自动化运动控制水平,实现更高效、更精准的生产作业。

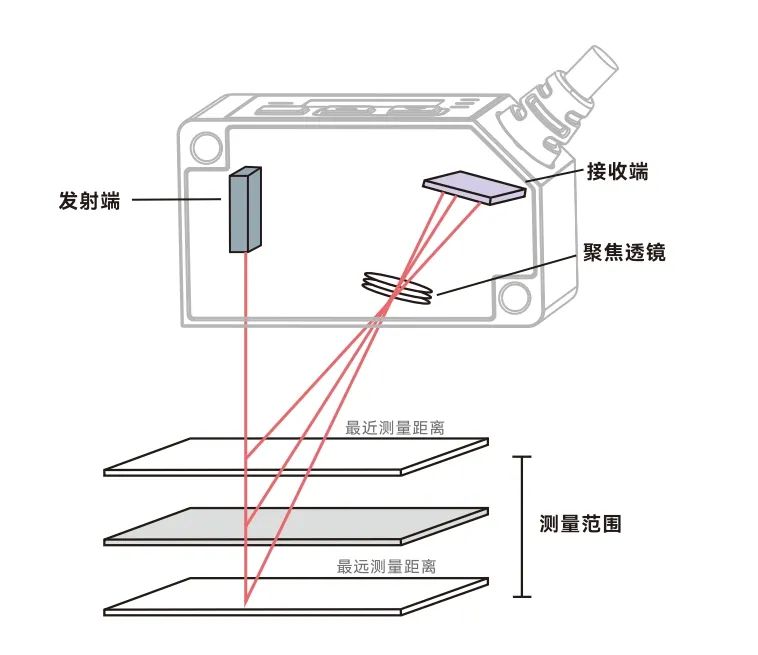
·采用激光三角检测法,激光发射器通过镜头将可见红色激光射向被测物体表面,经物体表面散射的激光通过接收器镜头,被内部的CMOS感光元件接收,根据不同的距离,CMOS可以在不同的角度下“看见”这个光点。根据这个角度及已知的激光和相机之间的距离,数字信号处理器就能计算出传感器和被测物体之间的距离。
一键示教功能,使用简单快捷
面板调节数显,让调试更直观便捷
自动曝光调节,可根据应用场景自动调节接收能量的大小
检测距离100/200/500mm可选,是长距离检测的首选
485通信功能,可通过通讯去读取数值进行对比操作
同时拥有NPN和PNP两种输出方式,满足不同信号方式需求
-
机械手 OEM 的应用2024-09-18 1022
-
【GoKit申请】六轴智能机械手2015-11-02 6893
-
使用桁架式机械手有哪些优势?2020-11-25 1732
-
PLC控制机械手设计2008-12-13 2974
-
IGM焊接机械手的故障与维修2009-07-15 909
-
机械手的顺序控制系统的设计2010-07-08 1307
-
基于PLC的机械手混合驱动控制2011-08-15 1280
-
基于PLC的机械手控制设计(毕业设计)2015-11-13 2644
-
东芝机械手操作2017-10-20 3376
-
_基于Arduino的体感机械手设计2018-01-22 2423
-
机械手图册——机械手设计必看2018-02-01 2597
-
基于无线传感器的采摘机械手避障系统研究2018-02-09 1199
-
触觉传感技术在软体机械手领域的应用2023-10-17 2890
-
坐标机械手配件有哪些?2023-12-07 1980
-
明治案例 | 【BGS背景抑制】【大光斑】机械手吸取网布有无检测2024-08-30 1177
全部0条评论

快来发表一下你的评论吧 !
